

什么是双足机器人
机器人
描述
双足步行机器人---直立行走,其有着良好的自由度、动作灵活、自如、稳定。双足机器人是一种仿生类型的机器人,能够实现机器人的双足行走和相关动作。作为由机械控制的动态系统,双足机器人包含了丰富的动力学特性。在未来的生产生活中,类人型双足行走机器人可以帮助人类解决很多问题比如驮物、抢险等一系列危险或繁重的工作。
一、机器人的结构设计
机器人的关节
双足竞步机器人的结构类似于人类的双足,可以实现像人类一样行走。本机器人采取了使用模拟舵机代替人类关节,实现机器人的步态设计控制。使用舵机控制芯片控制各个关节的动作,从而实现了对步伐的大小、快慢、幅度的控制。
用铝合金或其他轻型高硬度材料来制作机器人的结构件,类似于人类的骨骼,从而来支撑机器人的整体。用轻型、有一定强度的材料(比如亚克力板)来制作机器人的顶板和脚板,模拟人类的胯部和脚掌从而来支持机器人的行走与稳定。因为行走是多关节配合的动作,机器人能独立完成行走或其他任务。作为类人形机器人,本机器人采用六个舵机分别代替两条腿的关节,其中一条腿的三个关节如图 1 所示。
图 1 双足机器人的关节
图 2 机器人关节的结构
舵机:使用舵机来代替关节活动。舵机的好坏决定了机器人行走的质量。选择质量好,运行平稳,执行到位的常规舵机即可,结构件的尺寸与型号决定的关键是在于舵机的尺寸型号。
机器人的硬件结构
机器人的硬件结构如图 3 所示。
图 3 机器人硬件结构
结构件:用 2 mm 铝合金板制作结构件来代替骨骼。材料选择需注意:材料需满足易切割,打孔。材料成型后不易形变。能支撑机器人重量。
脚板、顶板:使用 0. 5 mm 亚克力板制作机器人的脚板和顶板,来模拟人的脚掌和盆骨。
二、机器人控制器的设计
控制板相当于人的大脑对舵机发布指令控制机器人动作,本文采用 Atmegal 6 作为机器人的主控制板。ATmegal 6 基于增强的 AVR RISC 结构的低功耗 8 位 CMOS 微控制器。由于其先进的指令集以及单时钟周期指令执行时间 ATmegal6 的数据吞吐率高达 1 MIPS/MHz,从而可以减缓系统在功耗和处理速度之间的矛盾。
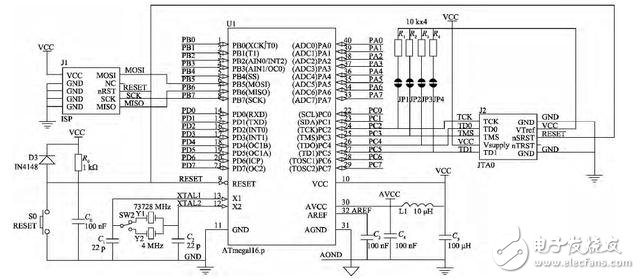
图 4 机器人核心控制电路图
三、软件设计与调试
机器人工作流程
双足竞步机器人(窄足)的步态比较接近于人类正常行走时的步态,按照重心进行步态控制。为了方便程序的编写和动作的调试,关节舵机的编号为 (0-5)号。编程为理想化编程,实际程序会和理想编程有所偏差,因此编程完成之后要进行多次动作的微调,机器人工作流程图如图 5 示。
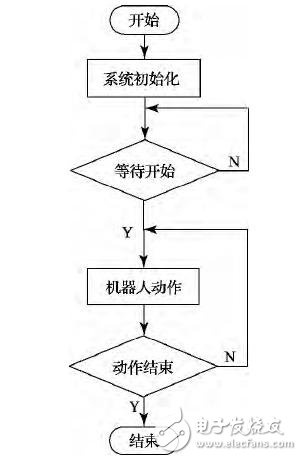
图 5 机器人工作流程图
机器人舵机是对称安装,在编写代码时要注意舵机的运动方向。机器人在反转动作时不宜太快,太快可能会导致代码不能完全读出导致动作不到位使机器人出现摔倒的情况。
- 相关推荐
- 热点推荐
- 机器人
-
基于气动人工肌肉的双足机器人关节设计方案2012-12-06 4494
-
基于安芯一号SLH89F5162芯片的双足机器人2013-09-28 2828
-
双足机器人2013-11-25 3246
-
ColorSky双足机器人开源项目2016-04-21 10617
-
基于连杆机构的双足机器人起立方法分析2010-01-13 1111
-
舞蹈双足机器人的设计及实现2011-06-07 1448
-
悟空、悟能双足机器人教程2016-12-20 861
-
双足机器人Cassie的进化2019-03-04 7393
-
基于ZMP的双足机器人动态步行控制研究2019-12-31 2555
-
双足机器人Digit现已开售 可以应用在物流行业2020-01-06 1304
-
怎么样才能设计仿人双足机器人的机构2020-01-15 2018
-
平面液压双足机器人步态规划及阻抗控制研究说明2020-01-17 1728
-
如何实现双足机器人爬楼梯的步态规划与参数优化2020-04-07 2295
-
美国创业公司Agility Robotics宣布其双足机器人Digit现已开售2021-03-25 3158
-
站在“大圣”的肩膀上,探索双足机器人未来之路!2023-08-08 2417
全部0条评论

快来发表一下你的评论吧 !
