

工业机器人如何通过示教器【COORD】选择合适的坐标
机器人
551人已加入
描述
一、发那科工业机器人坐标系介绍:
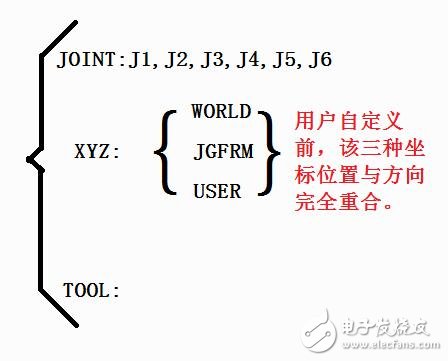
通过示教器【COORD】选择合适的坐标:
JOINT(关节坐标),JGFRM(手动坐标),WORLD(全局坐标)
TOOL(工具坐标),USER(用户坐标)
图1:
二、右手定则:
图2:
(特别提醒:必须在手动模式下才能进入工业机器人工作区域,注意自身人身安全)
图3:
1、手拿示教器站在工业机器人正前方(如图3所示)。
2、面向工业机器人,举起右手于视线正前方摆手势(如图2所示)。
3、由此可得:中指所指方向即为全局坐标X+;
拇指所指方向即为全剧坐标Y+;
食指所指方向即为全局坐标Z+。
三、WORLD在发那科工业机器人中称为:全局坐标系
在ABB工业机器人中也可以称为:世界坐标系
也有些工程师称之为:基坐标
图4:
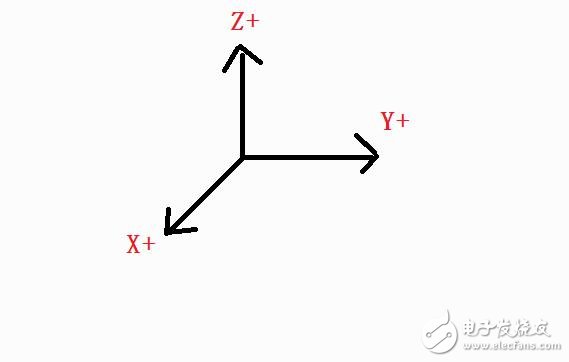
如图4:上图即为右手定则所得基坐标XYZ的正方向。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 工业机器人
-
协作机器人拽拖示教详解2024-10-23 1459
-
工业机器人示教器按钮功能介绍2024-09-04 9924
-
工业机器人示教器可以通用吗?给你5点建议2024-03-23 1972
-
ARM工业平板在机器人示教器控制系统的应用2022-09-08 2353
-
ABB机器人示教器控制器常见故障维修2020-10-12 2132
-
工业机器人的技术原理2018-11-23 4905
-
零基础玩转工业机器人2018-10-29 4925
-
没有示教器,还能控制机器人吗?2018-05-30 12104
-
工业机器人的工作原理2017-12-15 4619
-
abb机器人示教器讲解2017-09-29 5372
-
采用i.MX6实现机器人智能示教系统2017-03-16 2977
-
码垛机器人示教器的设计与实现_朱琳2017-01-18 1100
-
【OK210申请】基于WinCE的工业机器人示教器的研制2015-07-23 2992
-
什么是工业机器人2015-01-19 6815
全部0条评论

快来发表一下你的评论吧 !
