

基于ST VL53L8CX ToF传感器的技术解析与应用设计
描述
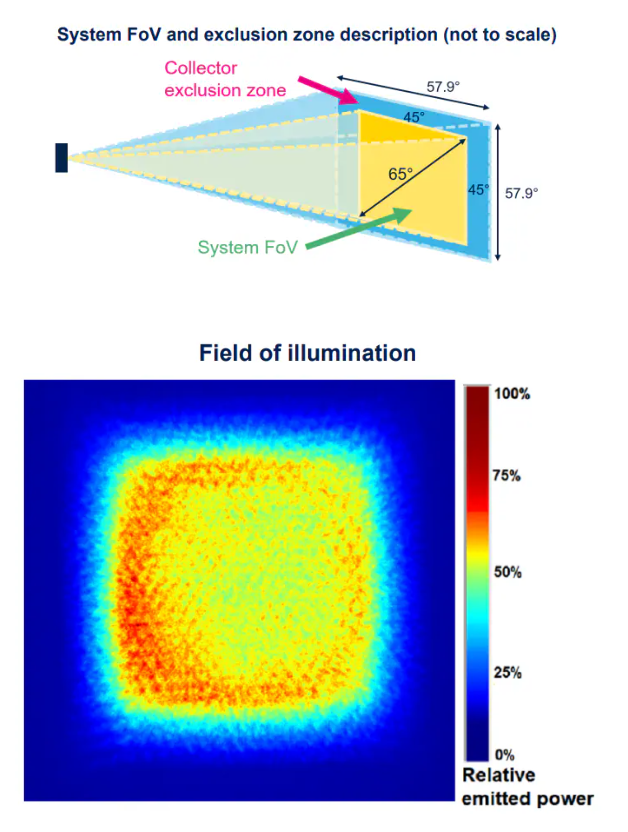
STMicroelectronics VL53L8CX 8x8多区域飞行时间传感器提高了环境光下的性能,降低了功耗。VL53L8CX基于ST的FlightSense技术,设计用于提供高达400cm的精确测距,具有65° 对角线FoV。VL53L8CX能够测量绝对距离,不受目标颜色和反射率的影响。VL53L8CX集成了功能强大的新一代VCSEL和两个高级超表面透镜。一体化模块支持更广泛的高性能用例,例如低功耗系统激活、手势识别、机器人SLAM、液位监测等。
数据手册;*附件:STMicroelectronics VL53L8CX 8x8多区域飞行时间传感器数据手册.pdf
ST VL53L8CX ToF传感器采用获得专利的算法,通过64区深度测量检测和跟踪FoV内的多个目标。直方图可确保玻璃盖串扰抑制超过60cm。该传感器支持SPI和^I2C^接口,可实现高频帧率和短启动时间。VL53L8CX的VCSEL会发出完全不可见的940nm IR光,并通过了对眼睛安全的1级认证。
特性
- 新一代多区域ToF(飞行时间)传感器,具有低功耗和增强的测距性能
- 多区域距离测量功能,具有4x4或8x8独立区域
- 自主低功耗模式,具有可编程中断阈值,可唤醒主机
- 测距高达400cm,在环境光下具有增强性能
- 每个区域多目标检测和距离测量
- 直方图处理和算法补偿可最大限度地减少或消除盖玻片串扰的影响
- 每个区域运动指示灯,用于显示目标是否移动以及如何移动
- 帧速率能力:60Hz
- 易于集成
- 可回焊单元件
- 需要1.8V内核电源和3.3V AVDD电源
- 可选1.2V或1.8V IOVDD接口电压电平
- ^I2C^ (高达1MHz)或SPI(高达20MHz)接口
- 兼容各种盖玻片材料
- 可以隐藏在深色玻璃罩后
- 具有宽FoV(视场)的全集成微型模块
- 新一代、940nm大功率发射器、不可见光VCSEL(垂直腔面发射激光器)和集成模拟驱动器
- 65°对角线方形FoV,在发射器和接收器上皆使用了DOE(扩散光学元件)
- 接收SPAD阵列(单光子雪崩二极管)
- 运行固件的低功耗微控制器
- 尺寸:6.4mm x 3.0mm x 1.75mm
系统框图

基于ST VL53L8CX ToF传感器的技术解析与应用设计
一、核心特性与技术创新
1.1 多区域测距能力
- 支持8x8(64区)和4x4(16区)两种分辨率模式
- 每个独立区域均可实现多目标检测与运动跟踪
- 直方图算法有效消除盖板串扰(防护距离>60cm)
1.2 性能突破
- 最大测距距离:400cm(全区域覆盖)
- 帧率:最高60Hz
- 功耗优化:自主低功耗模式下电流仅55μA(典型值)
1.3 光学系统设计
- 940nm VCSEL激光发射器(无感光安全认证)
- 双超表面透镜设计
- 65°对角线视场角(FoV)
二、硬件架构深度解析
2.1 供电系统设计
| 电源类型 | 电压范围 | 功能描述 |
|---|---|---|
| AVDD | 3.13-3.47V | 模拟电路与激光驱动器供电 |
| CORE_1V8 | 1.62-1.98V | 核心处理器电源 |
| IOVDD | 1.08-1.32V/1.62-1.98V | I/O接口电平匹配 |
2.2 接口方案对比
- I²C接口
- 设备地址:0x52
- 最高速率:1MHz
- 典型应用:需外接2.2kΩ上拉电阻
- SPI接口
- 最高时钟:20MHz
- 支持模式:CPOL=1, CPHA=1
- 数据传输:全双工同步通信
2.3 引脚关键功能
- INT引脚:中断输出(开漏配置)
- LPn引脚:低功耗模式通信使能
- SYNC引脚:多设备同步触发
三、测距性能实测分析
3.1 连续测距模式性能
4x4分辨率 @30Hz :
- 白色目标(88%反射率):400cm(暗光)/285cm(5klux)
- 测量精度:近距离±10mm,远距离±3%(暗光条件下)
8x8分辨率 @15Hz :
- 灰色目标(17%反射率):245cm(暗光)/115cm(5klux)
3.2 自主测距模式优化
1Hz帧率 @5ms积分时间 :
- 功耗表现:4x4模式仅1.6mW
- 温度漂移:典型值0.1mm/°C
四、典型应用电路设计
4.1 电路设计要点
- 去耦电容必须贴近模块引脚布置
- 热焊盘需连接至地层确保散热效果
- 盖板开口尺寸必须大于接收器禁入区
4.2 抗干扰设计
- 采用RC缓冲电路抑制dV/dt
- 环境光免疫:在5kLux照度下保持稳定测距
- 串扰防护:60cm以上有效消除光学串扰
五、核心应用场景实现
5.1 机器人导航系统
- SLAM建图与定位
- 悬崖检测与避障
- 地面类型识别
5.2 智能终端应用
- 用户检测唤醒设备
- 手势识别交互
- 激光辅助对焦(LAF)
5.3 工业检测场景
- 液位监测
- 物料体积计算
- 集装箱装载状态识别
六、系统集成关键考量
6.1 热设计管理
- 最大结温:125℃
- 热阻特性:需通过热焊盘有效散热
6.2 组装工艺要求
- 回流焊温度曲线遵循JEDEC标准
- 压缩负荷:最大25N
- 防潮等级:MSL3(168小时车间寿命)
七、性能测试验证标准
7.1 测试条件定义
- 目标反射率:17%/54%/88%三阶标准
- 环境光照:5kLux等效测试条件
- 检测率基准:90%有效测量成功率
7.2 关键指标验证
- 波形比对:示波器实测与手册偏差<5%
- EMC测试:满足IEC 61000-4-2静电放电标准
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
VL53L8CX小板开发(1)----驱动TOF进行区域检测2025-12-22 1721
-
ST VL53L7CX 飞行时间传感器技术解析与应用指南2025-10-28 1219
-
STM32 ToF传感器评估套件技术解析:基于P-NUCLEO-53L8A1数据手册2025-10-25 1673
-
VL53L8CX TOF开发(3)----检测阈值2024-06-19 3616
-
VL53L8CX TOF开发(1)----驱动TOF进行区域检测2024-05-20 2883
-
意法半导体推出新一代8 x 8多区飞行时间测距传感器VL53L8CX2023-12-27 3517
全部0条评论

快来发表一下你的评论吧 !
