

盘点工业机器人的四大新型驱动方式
描述
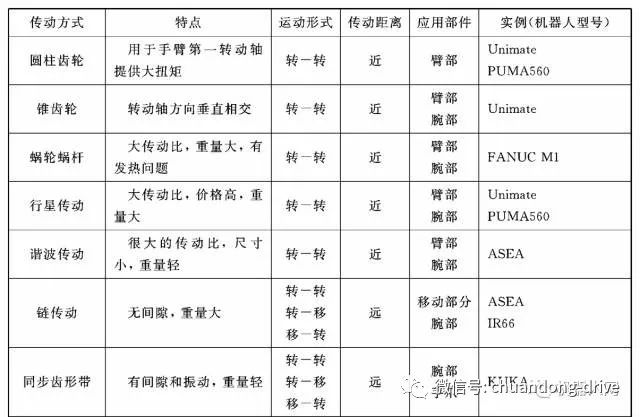
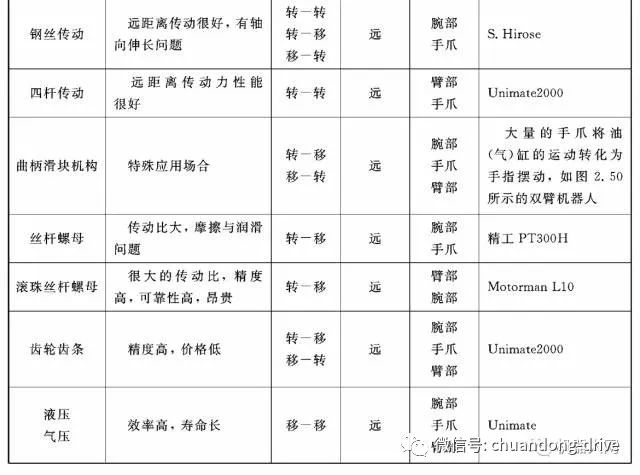
工业机器人的传动
工业机器人的传动装置与一般机械的传动装置的选用和计算大致相同。 但工业机器人的传动系统要求结构紧凑、 重量轻、转动惯量和体积小, 要求消除传动间隙, 提高其运动和位置精度。工业机器人传动装置除齿轮传动、蜗杆传动、 链传动和行星齿轮传动外, 还常用滚珠丝杆、 谐波齿轮、钢带、 同步齿形带和绳轮传动。
表1工业机器人常用传动方式的比较与分析
新型的驱动方式
1. 磁致伸缩驱动
铁磁材料和亚铁磁材料由于磁化状态的改变, 其长度和体积都要发生微小的变化, 这种现象称为磁致伸缩。
20世纪60年代发现某些稀土元素在低温时磁伸率达3000×10-6~10 000×10-6,人们开始关注研究有适用价值的大磁致伸缩材料。
研究发现,TbFe2(铽铁)、SmFe2(钐铁)、DyFe2(镝铁)、 HoFe2(钬铁)、TbDyFe2(铽镝铁)等稀土-铁系化合物不仅磁致伸缩值高, 而且居里点高于室温, 室温磁致伸缩值为1000×10-6~2500×10-6, 是传统磁致伸缩材料如铁、镍等的10~100倍。 这类材料被称为稀土超磁致伸缩材料(Rear Earth Giant MagnetoStrictive Materials, 缩写为RE-GMSM)。
这一现象已用于制造具有微英寸量级位移能力的直线电机。为使这种驱动器工作, 要将被磁性线圈覆盖的磁致伸缩小棒的两端固定在两个架子上。当磁场改变时, 会导致小棒收缩或伸展, 这样其中一个架子就会相对于另一个架子产生运动。一个与此类似的概念是用压电晶体来制造具有毫微英寸量级位移的直线电机。
美国波士顿大学已经研制出了一台使用压电微电机驱动的机器人——“机器蚂蚁”。 “机器蚂蚁”的每条腿是长1 mm或不到1 mm的硅杆, 通过不带传动装置的压电微电机来驱动各条腿运动。这种“机器蚂蚁”可用在实验室中收集放射性的尘埃以及从活着的病人体中收取患病的细胞。
2. 形状记忆金属
有一种特殊的形状记忆合金叫做Biometal(生物金属), 它是一种专利合金, 在达到特定温度时缩短大约4%。 通过改变合金的成分可以设计合金的转变温度, 但标准样品都将温度设在90℃左右。
在这个温度附近, 合金的晶格结构会从马氏体状态变化到奥氏体状态,并因此变短。然而,与许多其他形状记忆合金不同的是,它变冷时能再次回到马氏体状态。如果线材上负载低的话,上述过程能够持续变化数十万个循环。
实现这种转变的常用热源来自于当电流通过金属时,金属因自身的电阻而产生的热量。结果是,来自电池或者其他电源的电流轻易就能使生物金属线缩短。
这种线的主要缺点在于它的总应变仅发生在一个很小的温度范围内,因此除了在开关情况下以外, 要精确控制它的拉力很困难,同时也很难控制位移。
图1 形状记忆金属制作的末端操作器
3. 静电驱动器
图2是一个带有电阻器移动子的三相静电驱动器的工作原理图。
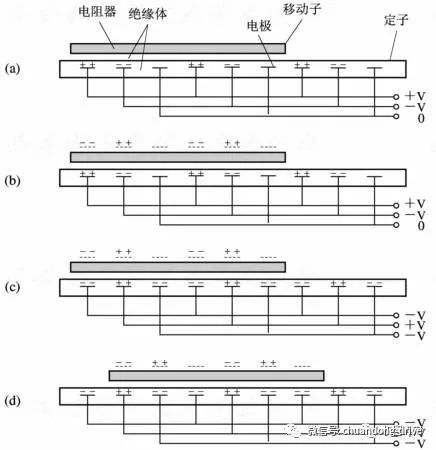
图2 三相静电驱动器工作原理
这种执行器有下列特征:
(1) 因为移动子中没有电极, 所以不必确定与定子的相对位置, 定子电极的间距可以非常小。
(2) 因为驱动时会产生浮力,所以摩擦力小,在停止时由于存在着吸引力和摩擦力, 因此可以获得比较大的保持力。
(3) 因为构造简单, 所以可以实现以薄膜为基础的大面积多层化结构。
基于上述各点, 把这种执行器作为实现人工筋肉的一种方法, 受到了人们的关注。
4. 超声波电机
超声波电机的工作原理是用超声波激励弹性体定子,使其表面形成椭圆运动, 由于其上与转子(或滑块)接触, 在摩擦的作用下转子获得推力输出。如图2.78所示, 可以认为定子按照角频率ω0,进行超声波振动, 在预压W作用下, 转子被推动。
超声波电机的负载特性与DC电机相似, 相对于负载增加, 转速有垂直下降的趋势,将超声波电机与DC电机进行比较, 它的特点有: ① 可望达到低速、 高效率; ② 同样的尺寸, 能得到大的转矩; ③ 能保持大转矩; ④ 无电磁噪声; ⑤ 易控制; ⑤ 外形的自由度大等。
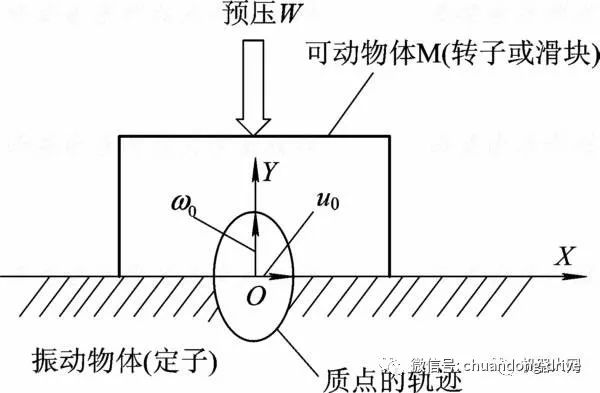
图3 超声波电机的工作原理图
驱动传动方式的应用
1. Movemaster EX RV-M1的驱动传动
图4 为三菱装配机器人Movemaster EX RV-M1的驱动传动简图。
该机器人采用电动方式驱动, 有5个自由度, 分别为腰部旋转、肩部旋转、肘部的转动、手腕的俯仰与翻转。各关节均由直流伺服电机驱动,其中,腰部旋转部分与腕关节的翻转为直接驱动。为了减小惯性矩,肩关节、肘关节和腕关节的俯仰都采用同步带传动。实验室常用的末端操作器(在零件装配时有开闭动作)采用直流电机驱动。
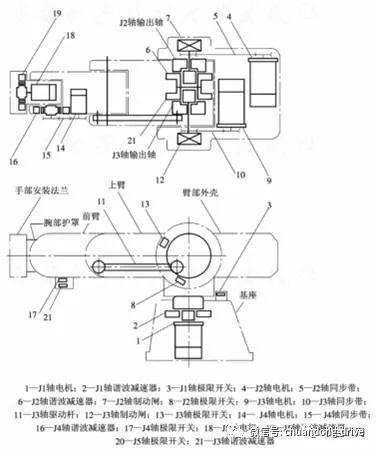
图4 三菱装配机器人内部结构简图
1) 腰部转动(J1轴)
(1) 腰部(J1轴)由基座内的电机①和调谐齿轮②驱动。
(2) J1轴限位(极限)开关③装在基座顶部。
2) 肩部(J2轴)旋转
(1) 肩部(J2轴)由肩关节处的调谐齿轮⑥驱动, 由连接在J2轴电机④上的同步带⑤带动旋转。
(2) 电磁制动闸⑦装在调谐齿轮⑥的输入轴上, 以防止断电时肩部由于自重而下转。
(3) J2轴限位开关⑧装在肩壳内上臂处。
3) 肘部伸展(J3轴)
(1) J3轴电机⑨的转动由同步带B10传送至调谐齿轮B21。
(2) 调谐齿轮B21上J3轴输出轴的转动由J3轴的驱动连杆传送至肘部的轴上,从而带动前臂伸展。
(3) 电磁制动闸B12装在调谐齿轮B21的输入轴上。
(4) J3轴限位开关B13安装在肩壳内上臂处。
4) 腕部俯仰(J4轴)
(1) J4轴的电机B14安装在前臂内。J4轴同步带B15将该电机的转动传送到调谐齿轮B16上,从而带动腕壳旋转。
(2) J4轴的限位开关B17安装在前臂下侧。
5) 腕部转动(J5轴)
(1) J5轴电机B18和J5轴调谐齿轮B19安装在腕壳内的同一轴上, 由它们带动手爪安装法兰旋转。
(2) J5轴的限位开关B20安装在前臂下。
2. PUMA 562机器人传动
PUMA 562机器人有6个自由度, 其传动方式如图5所示。由图可看出:
电机1通过两对齿轮Z1、 Z2、 Z3、 Z4传动带动立柱回转。
电机2通过联轴器、 一对圆锥齿轮Z5、 Z6和一对圆柱齿轮Z7、 Z8带动齿轮Z9, 齿轮Z9绕与立柱固联的齿轮Z10转动, 于是形成了大臂相对于立柱的回转。
电机3通过两个联轴器和一对圆锥齿轮Z1、 Z2、 两对圆柱齿轮Z13、 Z14, Z15、 Z16(Z16固联于小臂上)驱动小臂相对于大臂回转。
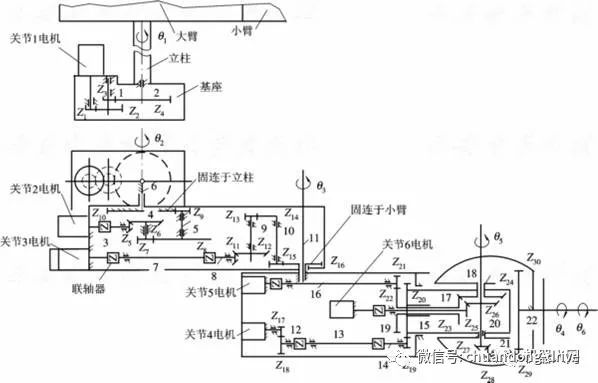
图5 PUMA 562机器人的传动示意图
电机4先通过一对圆柱齿轮Z17、 Z18、 两个联轴器和另一对圆柱齿轮Z19、Z20(Z20固联于手腕的套筒上)驱动手腕相对于小臂回转。
电机5通过联轴器、 一对圆柱齿轮Z21、 Z22、一对圆锥齿轮Z23、 Z24(Z24固联于手腕的球壳上)驱动手腕相对于小臂(亦即相对于手腕的套筒)摆动。
电机6通过联轴器、 两对圆锥齿轮Z25、 Z26, Z27、 Z28和一对圆柱齿轮Z29、 Z30驱动机器人的机械接口(法兰盘)相对于手腕的球壳回转。
-
中国传动网:工业机器人“四虎”进中国2014-04-09 3504
-
什么是工业机器人2015-01-19 6815
-
工业机器人所用的电机驱动系统2015-01-23 7436
-
工业机器人的四大核心部件2015-02-12 20425
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 14261
-
工业机器人与金属成形机床集成的四大应用2015-12-04 3752
-
工业机器人按驱动方式可分为哪些?2017-12-01 17113
-
零基础玩转工业机器人2018-10-29 4923
-
机器人四大家族抢滩中国市场 地方***重点发力2018-11-21 2522
-
工业机器人组成结构相关资料分享2021-07-05 2551
-
机器人系统与控制需求简介2021-09-08 2221
-
关于工业机器人的知识汇总2021-10-11 3877
-
那些不输“四大家族”的高端机器人公司2016-11-28 3826
-
四大家族垄断全球工业机器人市场2018-09-03 5132
-
四大家族如何垄断全球工业机器人市场2018-11-14 3899
全部0条评论

快来发表一下你的评论吧 !
