

ST VL53L7CX 飞行时间传感器技术解析与应用指南
描述
STMicroelectronics VL53L7CX飞行时间多区测距传感器设计用于需要超宽FoV的应用。STMicroelectronics VL53L7CX飞行时间传感器提供90° 对角线FoV。该器件基于ST的FlightSense技术。包含一个位于激光发射器上的高效元表面镜头 (DOE),可以将60° x60° 方FoV投影到场景中。它具有多区域能力,提供8x8区(64区)矩阵,运行速度高达60Hz (350cm)。
数据手册:*附件:STMicroelectronics VL53L7CX飞行时间多区域测距传感器数据手册.pdf
特性
- 快速准确的多区测距传感器,具有90°宽FoV
- 60°x60°方形视场 (FoV)(90°对角线)
- 多区域测距输出,具有4x4或8x8独立区域
- 自主低功耗模式,具有可编程中断阈值,可唤醒主机
- 测距:高达350cm
- 每个区域多目标检测和距离测量
- 60Hz帧速率能力
- 直方图处理和算法补偿可最大限度地减少或消除盖玻片串扰的影响
- 每个区域运动指示灯,用于显示目标是否移动以及如何移动
- 完全集成的微型模块
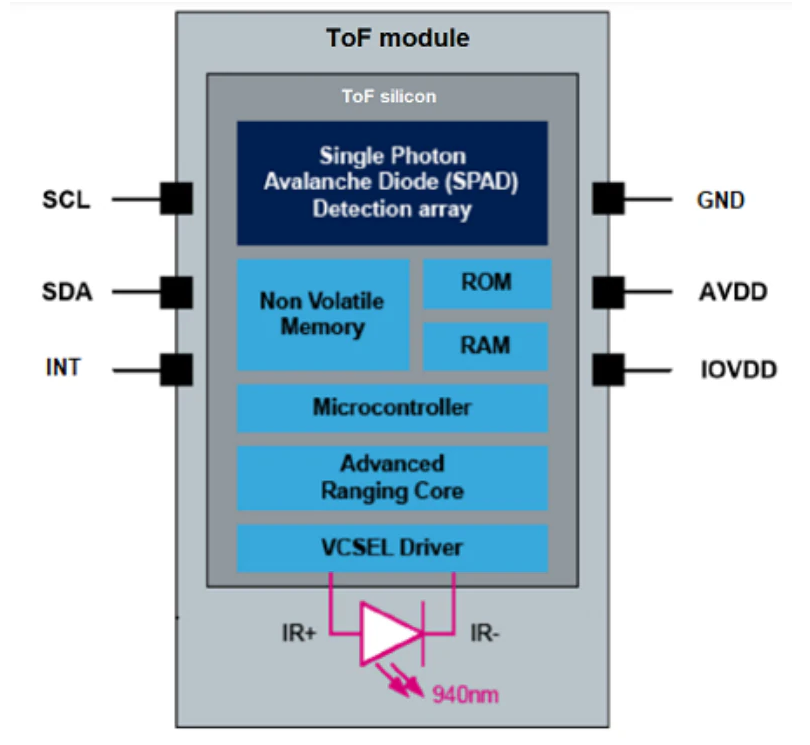
- 发射器:940nm不可见光垂直腔面发射激光器 (VCSEL) 和集成模拟驱动器
- 发射器和接收器上扩散光学元件 (DOE),支持方形FoV
- 接收单光子雪崩二极管 (SPAD) 阵列
- 运行固件的低功耗微控制器
- 尺寸:6.4mm x 3.0mm x 1.6mm
- 易于集成
- 可回焊单元件
- 灵活的电源选项,3.3V或2.8V单操作,或3.3V或2.8V AVDD与1.8VIOVDD的组合
- 兼容各种多种玻璃罩材料。
框图
ST VL53L7CX 飞行时间传感器技术解析与应用指南
一、核心特性与技术创新
1. 突破性的多区域测距能力
- 8×8多区域矩阵:64个独立测距分区实现厘米级空间感知
- 90°对角视场角:60°×60°方形视野,覆盖范围较前代提升50%
- 双分辨率模式:支持4×4(16区)和8×8(64区)动态切换
- 350cm最大测距:在低反射率目标(17%灰)下仍可实现140cm有效探测
2. 智能低功耗架构
- 自主模式:可编程距离阈值唤醒主机,功耗低至5.4mW@1Hz
- 运动指示器:逐区监测目标运动状态与方向
- 60Hz刷新率:满足动态场景实时追踪需求
二、硬件设计关键技术要点
1. 精密光学系统集成
- 发射端:940nm垂直腔面发射激光器(VCSEL)+衍射光学元件(DOE)
- 接收端:单光子雪崩二极管(SPAD)阵列
- 微型封装:6.4×3.0×1.6mm尺寸适合嵌入式设备
- 覆盖玻璃兼容性:直方图算法有效消除串扰影响
2. 灵活电源管理方案
- 多电压组合:AVDD(2.8V/3.3V) + IOVDD(1.8V/2.8V/3.3V)
- 典型应用电路:
- 电源引脚就近部署100nF陶瓷电容
- I2C总线需2.2kΩ上拉电阻
三、性能参数深度分析
1. 测距精度表现
- 4×4模式@30Hz:
- 暗环境:±9mm(20-200mm),±3%(200-4000mm)
- 强光环境(5klux):±7mm(20-200mm),±7%(200-4000mm)
2. 工作模式对比
| 模式 | 分辨率 | 帧率 | 功耗 | 适用场景 |
|---|---|---|---|---|
| 连续模式 | 8×8 | 15Hz | 313mW | 实时3D建模 |
| 自主模式 | 4×4 | 1Hz | 5.4mW | 人员检测 |
四、典型应用场景实施方案
1. 机器人导航与避障
- SLAM建图:三颗传感器组合实现180°×60°覆盖
- 悬崖检测:多区域同步监测确保安全
2. 智能家居交互
- 手势识别:宽视场支持多角度动态捕捉
- 用户检测:超低功耗唤醒智能设备
3. 工业视觉增强
- 内容管理:货车装载检测、料位监控
- AR/VR辅助:多区域深度测量提升沉浸体验
五、设计注意事项与优化建议
1. 供电时序关键要求
- 上电顺序:AVDD先于或同步IOVDD
- 断电顺序:AVDD晚于或同步IOVDD
- 最小压摆率:AVDD 0.001V/µs,IOVDD 0.012V/µs
2. 热管理解决方案
- 散热焊盘:必须连接到地平面
- 温度补偿:自动校准减少漂移(0.15mm/℃)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于STM32的VL53L4CD高精度飞行时间传感器技术解析与应用实践2025-10-31 1119
-
基于VL53L4CX的飞行时间传感器扩展板:X-NUCLEO-53L4A2技术解析2025-10-30 1391
-
VL53L4CX飞行时间传感器技术解析与应用实践2025-10-29 1090
-
基于VL53L7CX ToF传感器的STM32开发套件技术解析与应用实践2025-10-28 1050
-
VL53L8系列ToF传感器开发板技术解析与应用指南2025-10-25 1957
-
VL53L8CH飞行时间传感器技术解析与应用指南2025-10-24 1338
-
VL53L7系列ToF传感器分线板技术解析与应用指南2025-10-15 1191
-
意法半导体的多区飞行时间(ToF)传感器系列介绍2024-02-28 2881
-
多区飞行时间(ToF)传感器的特点2024-02-25 2548
-
ST的飞行时间传感器产品以及哪些传感器具有哪些功能2022-12-07 829
-
VL53L5CX #高达 8x8 多区域测距和 63°对角线宽视场 飞行时间多区域测距传感器2022-09-01 18271
-
Adafruit VL53L0X飞行时间距离传感器的使用2019-11-28 14924
全部0条评论

快来发表一下你的评论吧 !
