

基于工业路由器的工业机器人远程监控系统方案
描述
一、方案背景
随着我国经济的高速发展和产业结构的不断升级,工业机器人在柔性加工生产中的应用日益广泛,对设备运行的稳定性和可靠性提出了更高要求。然而,当前许多工业机器人因设备无法联网,导致运维服务不够及时准确,严重影响了客户的使用体验和企业的生产效率。因此,实现对工业机器人的联网监控与高效运维,越来越成为提升企业竞争力的关键所在。
二、痛点分析
1、设备单机运行,故障无从得知:由于工程项目需求多样,工业机器人广泛分布于全国各地,数量众多且种类繁多,导致设备管理混乱,一旦出现问题难以精确定位。
2、故障响应滞后,运维效率低下:设备异常数据无法及时反馈至管理人员,导致无法及时进行管理和控制,容易引发生产事故和运维失误。
3、数据记录不全,分析利用不足:监控中心缺乏充足的数据支持,无法为管理者提供全面准确的信息,数据得不到有效分析和利用,导致决策不够及时精准。
三、解决方案
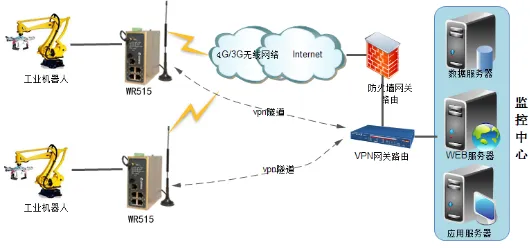
现场设备包括机器人控制器、网口PLC及传感器,通过接入物通博联工业线路由器并对接到应用服务器中,从而实现监控平台可以24小时不间断采集现场实时数据,动态显示现场各个监控站点变化的数据,在机器人工作异常时可以直接通过应用服务器访问机器人控制终端修改机器人运行轨迹,并建立高效可靠的运维流程。
方案优势
性能稳定:采用工业级高性能处理器,能够经受长期恶劣环境考验,确保通信顺畅;配有设备重拨功能,保证设备永远在线。
成本较低:利用当地运营商的3G/4G网络,无需网络布线,设备安装灵活,不受地理环境影响,单点设备价格便宜,有效降低布线成本。
灵活扩展:采用标准通信协议及丰富接口,便于安装施工、调试、运行和维护;可同时采集控制一厂房内的多台机器人。
远程控制:借助远程通信网络,监控端能及时发现设备故障并下发指令,对远端工业机器人进行远程控制。
审核编辑 黄宇
-
无线化智能机器人的核心:4G工业路由器技术应用全景2025-07-28 635
-
工业路由器上网设置常见问题及解决方案2024-06-12 1980
-
远程户外监控组网方案,工业4G路由器ZR20002024-05-27 1459
-
基于工业路由器的智慧医疗远程监控系统2022-12-20 1546
-
PDF——工业机器人技术及应用2022-10-16 27325
-
基于工业路由器的工业机器人远程监控系统方案应用2022-09-06 1363
-
工业物联网·工业机器人远程监控系统方案2022-02-23 8510
-
工业LTE路由器如何监控和诊断远程设备2021-11-12 992
-
工业机器人50204动作监控报警如何解除?2019-04-18 10725
-
工业机器人的技术原理2018-11-23 4905
-
4G工业级无线路由器2018-03-02 6357
-
工业机器人的产业链2017-08-23 4457
-
如何系统性地学习工业机器人技术?2016-03-06 3334
-
工业机器人的基本结构2015-01-19 9243
全部0条评论

快来发表一下你的评论吧 !
