

DAC539G2-Q1 汽车级智能数模转换器(DAC)技术文档总结
描述
DAC539G2-Q1 是一款基于特定应用的查找表 (LUT) GPI 到 PWM 转换器。该器件具有一个 10 位 GPI 到电压输出转换器和一个电压到 PWM 转换器。这两个电路都可以从外部连接以创建 GPI 到 PWM 转换器。三个GPI映射到8个10位数字代码,这些数字代码表示电压输出。GPI上有一个可编程延迟,以消除这些输入上的毛刺。查找表值使用 I 2C 或 SPI 进行编程并存储在 NVM 中。GPI与I、2C和SPI进行多路复用。电压-PWM转换器使用比较器,一个输入作为可编程锯齿波或三角波形,另一个输入作为外部电压输入。
*附件:dac539g2-q1.pdf
该器件可自动检测 I 2C 和 SPI,并具有内部基准电压源。DAC539G2-Q1 是汽车停止灯和转向灯以及类似工业应用中故障通信的绝佳选择。
特性
- 符合 AEC-Q100 标准,适用于汽车应用:
- 温度等级 1:–40°C 至 +125°C,T A
- 三重通用输入
- 使用锯齿波或三角波形的PWM输出
- 10 位 GPI 电压输出
- 1 LSB DNL
- 自动检测 I 2C 和 SPI
- 1.62V V IH,V DD = 5.5 V
- MODE 引脚,用于在编程和独立模式之间进行选择
- 用户可编程非易失性存储器 (NVM)
- 内部、外部和VDD基准电压源
- PWM 频率纠错选项
- 工作范围广
- 电源:1.8 V 至 5.5 V
- 微型封装:16引脚WQFN(3 mm × 3 mm)
参数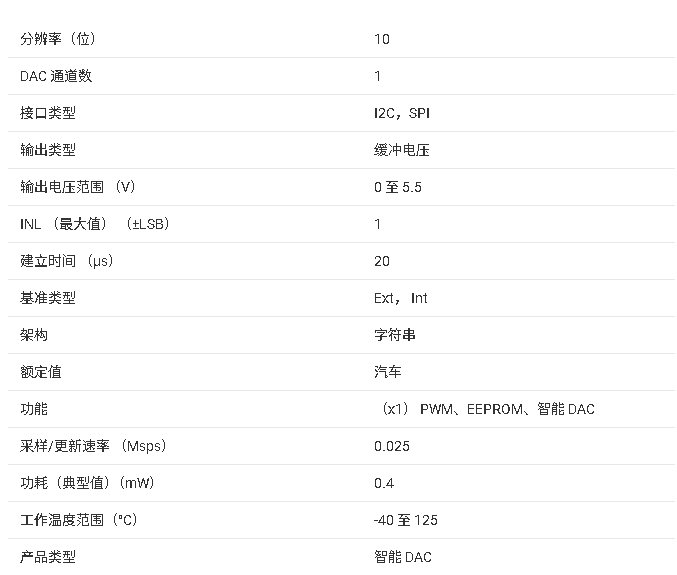
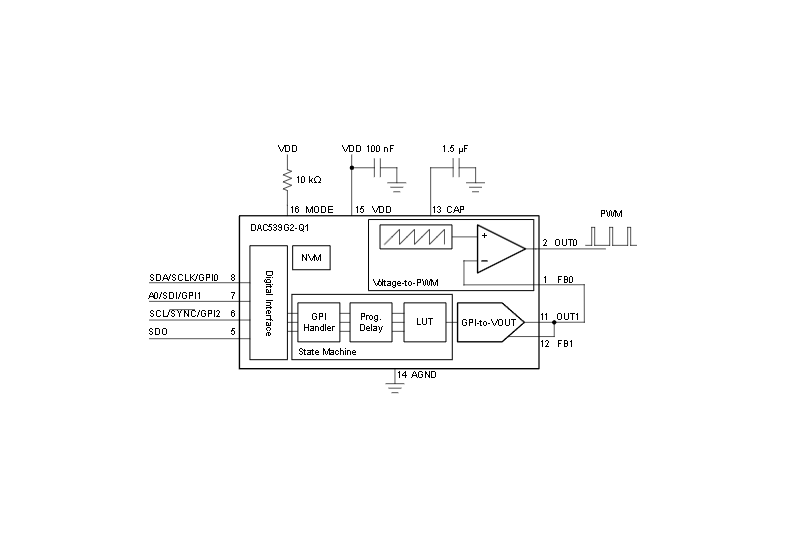
方框图
一、产品概述
DAC539G2-Q1 是一款双通道、带缓冲输出的汽车级智能 DAC,符合 AEC-Q100 Grade 1 标准(工作温度 - 40°C~125°C),采用 3mm×3mm 16 引脚 WQFN 封装(含可焊侧边版本)。器件核心定位为 “GPI-to-PWM 转换器”,通过查表(LUT)将 3 路 GPI 输入映射为 8 种 10 位 DAC 码,再经电压 - PWM 转换模块生成可调占空比的 PWM 信号;同时支持独立电压输出模式,可灵活适配汽车电子中 “输入 - 输出信号转换” 类需求,如故障通信、灯光控制等。
二、核心特性
1. 功能架构与核心能力
- 双通道灵活配置 :
- 通道 1(VOUT1):作为 GPI-to - 电压转换器,通过 LUT 将 3 路 GPI 的 8 种组合(000~111)映射为 10 位 DAC 电压输出,支持闭环反馈(FB1 引脚短接至 OUT1);
- 通道 0(VOUT0):作为电压 - to-PWM 转换器,内置比较器与波形发生器(锯齿波 / 三角波),将外部电压输入(如通道 1 输出)与内置波形比较,生成 PWM 信号,支持 PWM 频率误差校准。
- 多参考源选项 :支持 3 种电压参考模式 —— 电源电压(VDD)、内部 1.21V 基准(典型值)、外部参考(1.7V~VDD),适配不同精度需求;内部基准温度系数低至 60ppm/°C,稳定性优异。
- 自动接口检测 :无需硬件配置,上电后自动识别 I2C 或 SPI 通信协议,I2C 支持标准模式(100kbps)、快速模式(400kbps)与快速模式 +(1Mbps),SPI 支持 3 线(默认)/4 线(SDO 使能)模式,简化多主控系统设计。
2. 关键性能参数
- DAC 静态性能 :10 位分辨率,积分非线性(INL)±1.25LSB,差分非线性(DNL)±1LSB,确保电压输出精度;零码误差典型值 6mV(外部参考)、15mV(内部参考),满量程误差在 2.7V≤VDD≤5.5V 时仅 ±0.6% FSR,低温漂(增益误差温漂 ±0.0008% FSR/°C)。
- 动态性能 :输出电压建立时间(1/4
3/4 量程)典型值 20μs(VDD=5.5V),压摆率 0.3V/μs;输出噪声低,0.1Hz10Hz 频段峰峰值噪声 50μV(外部参考)、90μV(内部参考 4× 增益),1kHz 噪声密度 0.35μV/√Hz,信号纯净度高。 - PWM 转换能力 :支持三角波 / 锯齿波 / 反向锯齿波生成,波形频率通过
FUNCTION-MAX/FUNCTION-MIN(波形上下限)、CODE-STEP(码值步长)、TIME-STEP(时间步长)编程,典型频率范围可覆盖 100Hz~kHz 级;支持 PWM 频率误差校准,误差分辨率 0.2%/LSB,可补偿内部振荡器偏差。
3. 汽车级可靠性与防护
- AEC-Q100 合规 :温度等级 1(-40°C~125°C),ESD 防护符合 HBM±2000V、CDM±500V(全引脚)/±750V(边角引脚),满足汽车电子严苛环境要求。
- 故障管理 :集成 NVM 循环冗余校验(CRC),分别监测用户可编程 NVM(NVM-CRC-FAIL-USER)与内部 NVM(NVM-CRC-FAIL-INT),CRC 错误时可通过软件复位或重新编程恢复;支持寄存器锁定(DEV-LOCK),防止误写关键配置。
三、功能模式与配置
1. 核心工作模式
DAC539G2-Q1 通过MODE引脚切换 “编程模式” 与 “独立模式”,核心模式围绕 GPI-to-PWM 转换与电压输出设计,关键模式如下:
| 模式类型 | 关键配置 | 适用场景 |
|---|---|---|
| GPI-to-PWM 模式 | 通道 1:GPI-LUT - 电压输出;通道 0:比较器 + 波形发生器,FB0 接通道 1 输出 | 汽车尾灯 PWM 调光、故障信号输出 |
| 独立电压输出模式 | 通道 1 配置为纯 DAC 电压输出(FB1 短接 OUT1),通道 0 禁用或配置为比较器 | 模拟量控制(如传感器校准) |
| 低功耗模式 | 通过VOUT-PDN-X配置通道为高阻 / 10kΩ/100kΩ 接地,关闭内部基准,电流低至 28μA | 待机状态(如汽车熄火后监测) |
2. 关键功能配置
- GPI 防抖与 LUT 配置 :
- 3 路 GPI(GPI0~GPI2)支持可编程防抖延迟(
GPI-DEBOUNCE寄存器),延迟步长 160μs,默认 50ms,可消除输入信号毛刺; - LUT 含 8 个 10 位 DAC 码寄存器(
VOUT-DATA-0~VOUT-DATA-7),对应 GPI 的 8 种组合,默认值覆盖 12.5%~100% 占空比所需电压,用户可通过 I2C/SPI 重编程并存储至 NVM。
- 3 路 GPI(GPI0~GPI2)支持可编程防抖延迟(
- 波形发生器配置 :
- 波形类型:通过
FUNCTION-SELECT选择三角波(000)、锯齿波(001)、反向锯齿波(010); - 频率调节:三角波频率由公式
f=1/[2×TIME-STEP×CEIL((MAX-MIN)/CODE-STEP)]计算,例如TIME-STEP=8μs、CODE-STEP=1LSB、MAX=725、MIN=100时,频率约 100Hz; - 频率校准:
PWM-FREQUENCY-ERROR寄存器存储振荡器误差(0.2%/LSB),通过调整MAX/MIN补偿误差。
- 波形类型:通过
- NVM 存储与重载 :
- 支持将 LUT 值、参考源选择、功率配置等关键参数写入 NVM(
NVM-PROG触发),上电后自动从 NVM 加载配置,实现 “无处理器独立工作”; - 支持 NVM 数据重载(
NVM-RELOAD),可在配置错误时恢复默认参数。
- 支持将 LUT 值、参考源选择、功率配置等关键参数写入 NVM(
四、电气特性
1. 直流特性(典型值,TA=25°C,VDD=5.5V)
| 参数 | 测试条件 | 典型值 | 单位 |
|---|---|---|---|
| 内部基准电压(V_REF) | EN-INT-REF=1,无负载 | 1.21 | V |
| 零码误差 | 外部参考,CODE=0d | 6 | mV |
| 满量程电压(V_FS) | 外部参考 = 5.5V,增益 1× | 5.5 | V |
| 输出阻抗(Z_OUT) | 通道 1,midscale,外部参考 | 0.007 | Ω |
| 电源抑制比(PSRR,DC) | 内部参考,增益 2×,VDD±10% | 0.25 | mV/V |
2. 动态特性(典型值,TA=25°C)
| 参数 | 测试条件 | 典型值 | 单位 |
|---|---|---|---|
| 建立时间(t_sett) | 1/4~3/4 量程,10% FSR 误差 | 20 | μs |
| 压摆率 | VDD=5.5V,满量程切换 | 0.3 | V/μs |
| 输出噪声(Vn, PP) | 0.1Hz~10Hz,midscale | 50 | μV_PP |
| 比较器响应时间(t_resp) | 通道 0,推挽输出,25pF 负载 | 10 | μs |
五、引脚配置与封装
1. 封装规格
- 尺寸与材质 :3mm×3mm 16 引脚 WQFN(型号 RTE),含可焊侧边版本(DAC539G2W-Q1),引脚间距 0.5mm,最大高度 0.8mm;底部裸露热焊盘需焊接至 AGND,优化散热与机械稳定性。
- 热特性 :结到环境热阻(RθJA)49°C/W,结到板热阻(RθJB)24.1°C/W,结到顶部外壳热阻(RθJC (top))50°C/W,需配合 PCB 散热设计(如散热过孔)避免结温超 150°C 上限。
2. 关键引脚功能
器件引脚复用 GPI、通信接口与电源信号,核心引脚功能如下表:
| 引脚编号 | 引脚名称 | 功能描述 |
|---|---|---|
| 1 | FB0 | 通道 0 比较器输入,接外部电压(如通道 1 输出),实现电压 - PWM 转换 |
| 2 | OUT0 | 通道 0 输出:PWM 信号(比较器模式)或 DAC 电压(电压模式),未使用时需妥善处理 |
| 5 | SDO | 编程模式:SPI 数据输出(需使能);独立模式:悬空 |
| 6 | SCL/SYNC/GPI2 | 编程模式:I2C 时钟 / SPI 片选;独立模式:GPI2 输入 |
| 7 | A0/SDI/GPI1 | 编程模式:I2C 地址选择 / SPI 数据输入;独立模式:GPI1 输入 |
| 8 | SDA/SCLK/GPI0 | 编程模式:I2C 数据 / SPI 时钟;独立模式:GPI0 输入 |
| 11 | OUT1 | 通道 1 DAC 电压输出,闭环模式需短接 FB1 |
| 12 | FB1 | 通道 1 反馈输入,短接 OUT1 实现闭环电压输出,悬空时放大器饱和 |
| 13 | CAP | 内部 LDO 旁路电容引脚,需外接 1.5μF 电容至 AGND |
| 15 | VDD | 电源输入(1.7V~5.5V),需就近并 0.1μF 去耦电容 |
| 16 | MODE | 模式选择:低电平 = 编程模式,高电平 = 独立模式;可作为外部参考输入 |
六、应用场景与设计建议
1. 典型应用
- 汽车尾灯控制 :3 路 GPI 对应 “刹车 / 转向 / 示廓灯” 控制信号,LUT 映射为 8 种 PWM 占空比,实现灯光亮度分级调节;PWM 频率校准功能确保不同温度下亮度稳定。
- 故障通信模块 :将传感器故障状态(如开路 / 短路)通过 GPI 输入,LUT 映射为特定电压,再转换为 PWM 信号传输至 ECU,实现故障码可视化。
- 有线控制接口 :作为 “数字指令 - 模拟执行” 转换单元,如通过 GPI 输入控制电机驱动电压(通道 1 输出),或生成 PWM 信号调节风扇转速。
2. 设计建议
- 电源设计 :
- VDD 需 1.7V~5.5V,建议采用线性稳压器供电,避免开关噪声串扰;VDD 与 AGND 间并 0.1μF 陶瓷电容(就近引脚),CAP 引脚并 1.5μF 钽电容(低 ESR),确保 LDO 稳定。
- 外部参考电压需晚于 VDD 上电、早于 VDD 下电,避免反向电流损坏器件。
- 信号接口设计 :
- GPI 输入:需添加 1kΩ~10kΩ 上拉 / 下拉电阻,防抖延迟建议设置≥2ms(根据信号毛刺特性调整);
- I2C/SPI 接口:I2C 引脚(SDA/SCL)需外接 4.7kΩ~10kΩ 上拉电阻,SPI 片选(SYNC)需上拉,确保空闲时稳定。
- PCB 布局 :
- 模拟地(AGND)与数字地单点连接,DAC 输出(OUT0/OUT1)、反馈(FB0/FB1)路径短且远离数字信号线;
- 热焊盘需大面积连接 AGND 平面,添加 4~6 个散热过孔(0.3mm 孔径),降低结温。
-
DAC43401-Q1 汽车级 8 位 1 通道 VOUT 智能 DAC技术手册2025-11-01 1476
-
DAC53204-Q1 与 DAC63204-Q1 技术文档总结2025-10-29 965
-
DAC539E4W 智能数模转换器(DAC)技术总结2025-10-28 1095
-
DAC43701-Q1技术文档总结2025-10-27 919
-
德州仪器DAC539G2-Q1智能DAC技术解析与应用指南2025-08-18 1198
-
DAC63202和DAC53202智能数模转换器(DAC)数据表2024-07-16 652
-
DAC539G2-Q1汽车类10位智能DAC数据表2024-07-15 449
-
DAC数模转换器介绍2023-03-22 5103
-
如何使用智能数模转换器生成脉宽调制信号?2022-11-04 746
-
DAC数模转换器的主要特点有哪些2022-01-11 1475
-
介绍DAC数模转换器以及DMA的使用2021-08-12 3746
-
总结DAC——数模转换器2021-07-26 1807
-
F2产品技术培训_14.数模转换器(DAC)2017-03-15 974
-
数模转换器的基本原理及DAC类型简介2016-08-16 24225
全部0条评论

快来发表一下你的评论吧 !
