

CMOS图像传感器技术及SOI在近红外CMOS图像传感器中的应用
电子说
描述
一. 3D成像和传感市场
早期的3D成像和传感技术主要应用于传统的医疗和工业领域,但市场规模很小,数年来一直维持在1亿美元以下。随着近年来技术不断取得突破,3D成像和传感技术已经开始进军消费电子和汽车电子领域,未来将迎来爆发式的增长。
据最新预计(图1),3D成像与传感的全球市场规模将从2017年的21亿美元扩大至2023年的185亿美元,年复合增长率达到44%。在2017年iPhone X Face ID采用了3D像机的触发下,未来消费类3D成像和传感市场将持续成为增长最快、规模最大的领域:从2017至2023年,消费类3D成像和传感市场的年复合增长率将达到82%,到2023年的市占比将超过七成(图2)。
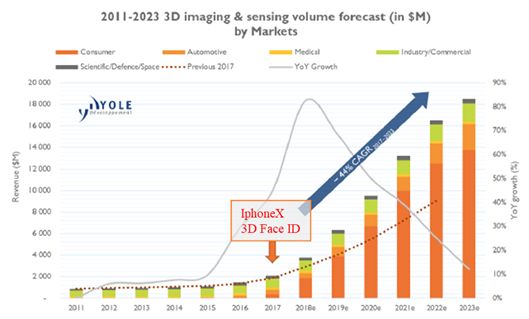
图1 2011~2023年3D成像和传感市场预测
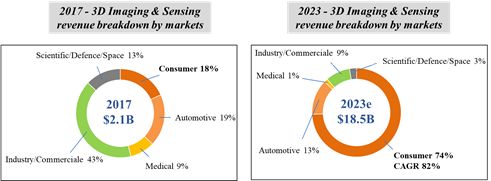
图2 2017年和2023年3D成像和传感细分市场占比
目前在移动消费市场,全球已经建立了完善的3D成像产业链(图3)。由于技术领先,苹果及其联盟公司目前牢牢把控3D成像技术,预计Android阵营大规模普及3D成像可能要到2019年。届时一旦Android智能手机的替代供应链就位,3D成像的市场的体量将快速增大。
在中国,诸多手机制造商已经开始布局3D成像技术:小米8探索版中搭载了3D人脸识别技术;OPPO和华为预计今年下半年相关机型也将会搭载3D传感器。虽然中国在手机应用端已经在全球率先切入3D成像,但是3D成像供应链基本都是海外公司,国内供应链缺失。由于技术壁垒较高,未来中国厂商很难打进3D成像的供应链。
图3 2018~2023年全球移动消费类3D成像生态链
二. CMOS图像传感器技术及SOI在近红外CMOS图像传感器中的应用
2.1 3D成像技术简介
现阶段,3D成像技术有三条主流技术路线:结构光(Structured light)、飞行时间(TOF,Time of Flight)和双目视觉技术(Stereo Vision)。下面对这三种技术作简要介绍。
1)双目测距。双目测距原理(图4(a))类似人的双眼,在自然光下通过两个相机抓取图像,然后通过三角形原理来计算并获得深度信息。目前的双摄就是双目测距的典型应用。
2)结构光。结构光技术(图4(b))主要是通过近红外激光器发射的具有一定结构特征的光线,投射到被拍摄物体上,再由专门的红外相机进行采集,采集后生成的图像相对原始光线结构发生变化,然后通过运算单元将这种结构的变化换算成深度信息,进而复原整个三维空间。
3)TOF。TOF成像原理(图4(c))是发射一束经过相位调制的红外激光到被测物体,当红外激光被反射回相机时,会因为光飞行时间的延迟,导致相位与发射时的相位有微小的变化,通过计算相位的变化,就可以计算出被测物体到相机之间的距离。
图4 3D成像。(a)双目测距,(b)结构光,(c)TOF。
图5 3种3D成像技术比较
比较这三种3D成像技术(图5):双目立体成像抗环境光干扰强,分辨率高,但整体系统的复杂性、高功耗、不理想的暗光环境表现,以及低精度给其应用带来较大的局限性。联想曾在Phab2 ProAR手机上尝试类似的方案,但体验并不乐观;TOF技术基本不需要使用光学棱镜,抗干扰性能好,视角更宽,不足是深度图像分辨率较低,功耗较大。业内普遍认为ToF适用于消费电子产品的后置3D成像,用于远具体、室外强干扰环境;结构光技术的优势在于技术成熟,功耗低,深度图像分辨率比较高,但是极易受到外界光的干扰、识别距离近,适合于消费电子产品前置3D成像,用于近距离场景。
从厂商的站队以及产品影响力来看,结构光技术是最主流的3D成像实现方法。采用结构光技术路线代表公司有苹果、微软、Intel、Google等。
2.2 iphoneX的3D成像技术
苹果早在2011年就开始布局3D成像领域(表1),特别是在2013年,苹果以3.45亿美元收购了以色列的3D视觉公司PrimeSense,这项收购是苹果史上最大手笔的收购之一。PrimeSense是结构光方案最主要的专利持有者,因此,iphoneX中的3D成像采用的推测是结构光技术。iPhoneX的TrueDepth通过结构光技术实现面部解锁,容错率可达百万分之一,安全性能良好。另外,由于借助不可见的红外光,TrueDepth还支持在黑夜等暗光环境下使用。

表1苹果近几年收购的3D成像技术公司
TrueDepth 3D相机除了能够获取平面图像以外,还可以获得拍摄对象的深度信息,即三维的位置及尺寸信息,其通常由多个相机+深度传感器组成,硬件复杂度较高,因此,iPhoneX在正面屏幕顶部开了个“齐刘海”(图6)。
TrueDepth是一款集成了五个子模块的复杂组合体(图6)。这五个子模块分别是:近红外相机(STM提供)、TOF测距传感器+红外泛光照明器(STM提供)、RGB相机(LG Innotek提供模组,索尼提供图像传感器)、点阵式投影器(ams提供)和彩色/环境光传感器(ams提供),该3D相机模组使用柱形凸块连接近图像传感器以及包括四个透镜的光学模块。
iPhoneX实际进行人脸识别的过程非常复杂,不过可以简化成以下几个步骤。
1)检测物体靠近。当人脸靠近时,首先工作的是距离感应器,它将会告诉iPhoneX是否有物体靠近;2)检测用户脸部。泛光感应元件采用垂直腔面发射激光器(VCSEL)对前方物体进行扫描,由红外镜头接收信息,并传给A11芯片神经网络系统进行判断,识别为脸部后再进行下一步操作;3)获取3D人脸信息。点阵投影器(结构光发射器)通过将30000多个肉眼不可见的近红外光点投影在人的脸部,绘制成独一无二的面谱;4)结构光接收。红外镜头则读取点阵图案,捕捉它的红外图像,为用户人脸绘制精确细致的深度图,然后将数据发送至A11以确认是否匹配,匹配度满足苹果设置的要求后手机就能实现解锁。
图6 iPhoneX“齐刘海”结构(上图)和所采用的3D成像模组(下图)
与传统相机硬件产业链相比,iPhoneX 3D相机产业链新增加了“红外光源+光学组件+红外传感器”等部分,其中红外CMOS传感器是核心器件,价格昂贵(表2)。iPhoneX红外CMOS传感器采用的是STM基于SOI技术的解决方案,接下来将重点解析。

表2 苹果3D传感零部件及价格细分
2.3 CMOS图像传感器技术路线
传统的CMOS图像传感器是在体硅上实现的,其灵敏度和分辨率主要采用两个关键指标衡量:1)量子效率(QE)。量子效率代表其捕获的光子与转化为电子的光子的比率,量子效率越高,图像越亮;2)模传递函数(MTF)。模传递函数代表输出像与输入像的对比度之比,模传递函数越高,图像越清晰。模传递函数主要受到像素间各种串扰(图7)的影响,因此也可以用串扰来评估模传递函数的高低。因此,设计高品质的CMOS图像传感器的要点有两个,一方面要提高量子效率,另一方面要降低串扰。下面介绍几种主流的隔离解决方案(图8)。
图7 体硅衬底上CMOS图像传感器的各种串扰示意图
首先第一种解决方案如图8(B)所示,采用不同剂量的P+对每个像素进行侧壁注入(SWI),注入后在像素两侧形成侧壁,可以钝化硅悬空键,减小光电二极管的暗电流,从而提高了光电转换效率。经过P+钝化后的像素的量子效率可以提高20%之多。
第二种解决方案(图8(C))是在n型硅衬底上制备钉扎深二极管(pinned deep diode)。这种方法是利用多重注入在像素内形成结电容隔离墙,可以降低像素间的串扰并且有效调控光生载流子的漂移。与传统二极管相比,深二极管在蓝色光谱中量子效率增加到60%,绿色光谱增加到超过50%。
图8 体硅衬底上不同的像素隔离架构
第三种解决方案是采用深槽隔离(DTI)结构进行隔离(图8(D))。DTI的机制如下(图9):Si-SiO2界面可用作隔离墙阻止电子扩散,降低串扰;Si-SiO2组成了类波导结构,将光线限制在硅中,实现了光学隔离,并且延长光在硅中的光程,提高量子效率、降低串扰。与前两种解决方案相比,DTI结构的隔离效果最为显著(图10)。另外,沟槽越深,DTI的隔离性越好,串扰越小。由图11结果知,DIT的深度一般要超过4μm。
图9 DTI结构抑制串扰、增加光程的机制
图10 (a)不同隔离方案量子效率比较,(b)P+注入和DTI隔离后像素的光学特性比较
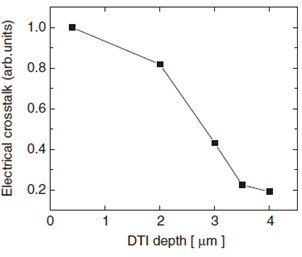
图11 串扰和DTI深度的关系
综上,采用DTI隔离技术在体硅上制备的CMOS传感器的灵敏度和分辨率最高,目前STM、三星具备采用DTI隔离技术制备CMOS传感器的能力。
2.4 iPhoneX的近红外图像传感器架构:DTI + SOI衬底
iphoneX中的近红外CMOS传感器是由苹果和STM联合开发的,器件的截面图如图12所示。
下面对该结构像素隔离的方案进行解析:首先,iphoneX采用了DTI隔离技术;另外,与2.3节介绍的体硅隔离不同,iphoneX采用的是SOI衬底。根据图8和图12,推测SOI衬底上近红外图像传感器的采用了DTI 与SOI衬底相结合的隔离架构(图13),该架构的特点是DTI结合SOI衬底的BOX层能够实像素的全隔离:通过DTI隔离像素间的光学和电学串扰;通过BOX隔离来自衬底的噪声,隔离金属污染;DTI和BOX形成了全反射腔,大大增加了有效光程,光捕获能力增大。因此,该架构能够提高量子效率、减少串扰,从而大幅提高了近红外传感器的灵敏度和分辨率。
图12 iPhoneX中近红外CMOS图像传感器的截面图
图13 SOI衬底上近红外图像传感器的结构和原理图
另外,BOX层上外延硅的厚度是由近红外光在硅中的穿透深度决定的。为了保证感应能力和避免太阳光的干,近红外图像传感器采用的一般是近红外短波,波长范围在780~1100nm之间,这个波段的近红外线在硅中的吸收深度﹥6μm(图14),从图(12)中知,iPhoneX中图像传感器硅外延层的厚度约6.1μm。在全反射腔的作用下,近红外线的吸收深度﹥6μm,满足应用需求。
图14 不同电磁波在硅中的穿透深度
经分析,iphoneX的近红外图像传感器对SOI衬底没有特殊要求,推测采用的是常规PD-SOI衬底,目前该衬底主要由Soitec公司提供。Soitec将面向传感器应用的SOI衬底称为Imager-SOI,产品规格为:晶圆尺寸是300mm,BOX厚度在15~150nm之间,顶层硅厚度在50~200nm之间。Soitec从2016年开始给STM供货Imager-SOI,随后产能不断增加。Soitec计划到2020年Imager-SOI的晶圆出货量5万片(图15)。
图15 Soitec Imager-SOI晶圆年出货量估计(单位:千片)
三. 总结
苹果实现了3D Face ID,同时也再次“解锁”了3D成像和传感技术。未来3D成像和传感技术将会渗透到更多的应用场景,其市场将会持续高速膨胀。SOI CMOS传感器技术已经在智能手机占得先机,被苹果证明在结构光3D成像中具有独特的优势,未来如果能够降低成本并打入Android阵营,则市场前景光明。
-
如何去提高CMOS图像传感器的图像质量?2021-04-20 4537
-
基于CMOS技术的图像传感器2020-08-10 4033
-
cmos图像传感器的应用2020-06-20 3560
-
CMOS有源像素传感器的图像质量怎么提高?2019-09-04 3712
-
IBM将提供CMOS图像传感器代工服务2018-11-20 2079
-
IBM进军CMOS图像传感器2018-11-19 2315
-
新型CMOS图像传感器设计2018-11-14 2779
-
CMOS图像传感器的原理参数和CCD图像传感器有什么区别等资料概述2018-11-07 3610
-
CMOS图像传感器的最新进展及应用2018-10-30 3974
-
CMOS图像传感器简议2018-10-29 2474
-
CMOS图像传感器电路设计2016-01-18 9057
-
CCD和CMOS图像传感器的比较2015-09-06 15201
-
CMOS图像传感器,CMOS图像传感器是什么意思2010-03-02 3031
-
CMOS图像传感器在空间技术中的应用2009-07-13 842
全部0条评论

快来发表一下你的评论吧 !
