

打破汽车动态测量困局, 虹科OMS光学传感器重塑汽车测试精度标杆
描述
引言
Introduction
在车辆动力学测试、自动驾驶领域,对物体运动的测量,始终追求更高精度、更强实时性与更便捷部署。传统惯性测量单元(IMU)与卫星定位系统(如GPS)的组合虽长期占据主流,但其技术瓶颈已难以满足前沿科技应用对数据精度、可靠性与便捷性的严苛要求。虹科OMS 7光学传感器将先进光学感知系统与高精度惯性测量单元深度融合,带来从底层原理到应用体验的彻底革新。
01 传统测量方案的局限性
惯性测量单元(IMU)的固有不足
惯性测量单元(IMU)作为一种推算定位系统,通过对角速度进行积分得到角度,二次积分加速度得到位移和速度。这种计算方式会放大传感器噪声与零偏,导致测量结果随时间产生显著积分漂移。即便高性能IMU,也需频繁零点校准或借助外部传感器校正,无法独立完成长时间、高精度的绝对运动测量。
卫星定位系统的局限性
相比之下,卫星定位系统虽能提供绝对位置信息以校正IMU漂移,但其信号易受遮挡与干扰,在隧道、林荫路、城市峡谷或地下车库等关键工况下失效。即便在开阔地带,其更新频率(通常为10-20Hz)也远低于高速动态测试需求,且精度(即便是RTK技术)在厘米级徘徊,难以满足对制动距离、车身微小姿态变化等参数的极致测量需求。
02 虹科OMS 7光学传感器:驱动汽车测试新变革
虹科OMS 7光学传感器的核心技术突破在于 将先进光学感知系统与高精度惯性测量单元(IMU)深度融合。
就动态测量技术而言,虹科OMS 7光学传感器并非简单的迭代升级,而是一次从底层原理到应用体验的彻底革新,旨在提供前所未有的“绝对运动真相”。
1 光学之“眼”
传感器通过光学镜头直接探测被测物体表面,以极高频率捕捉表面微观特征变化,避免传统方式通过多次积分推算所带来的误差累积。
工作原理
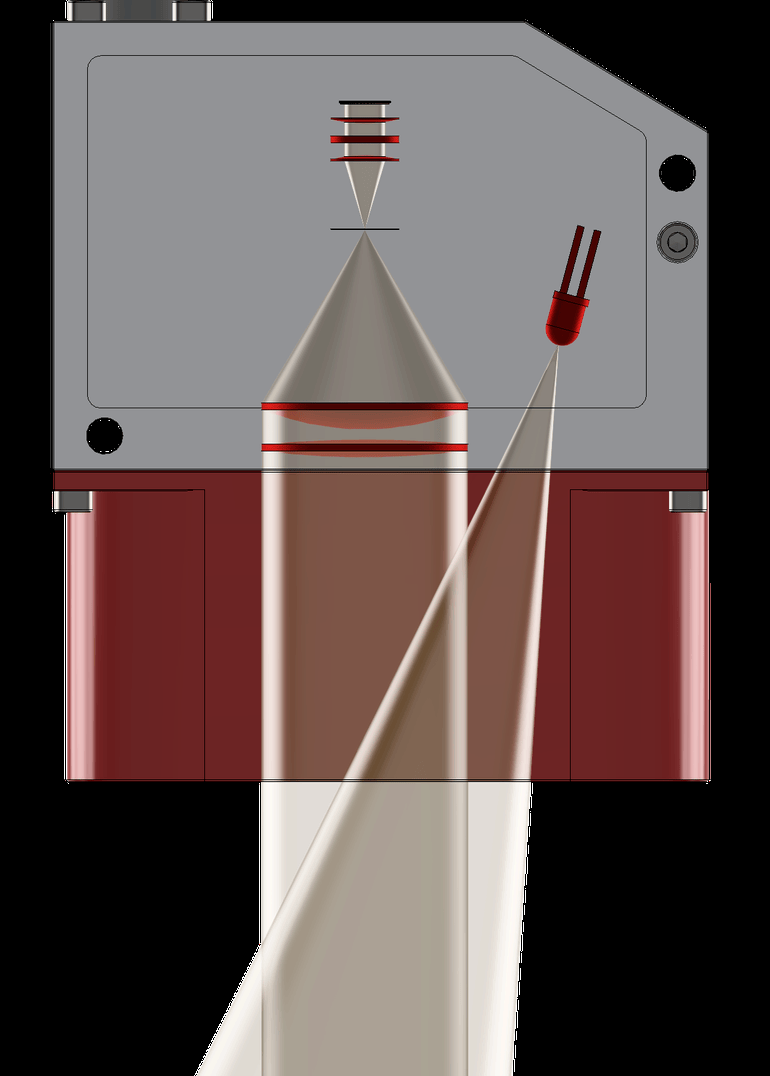
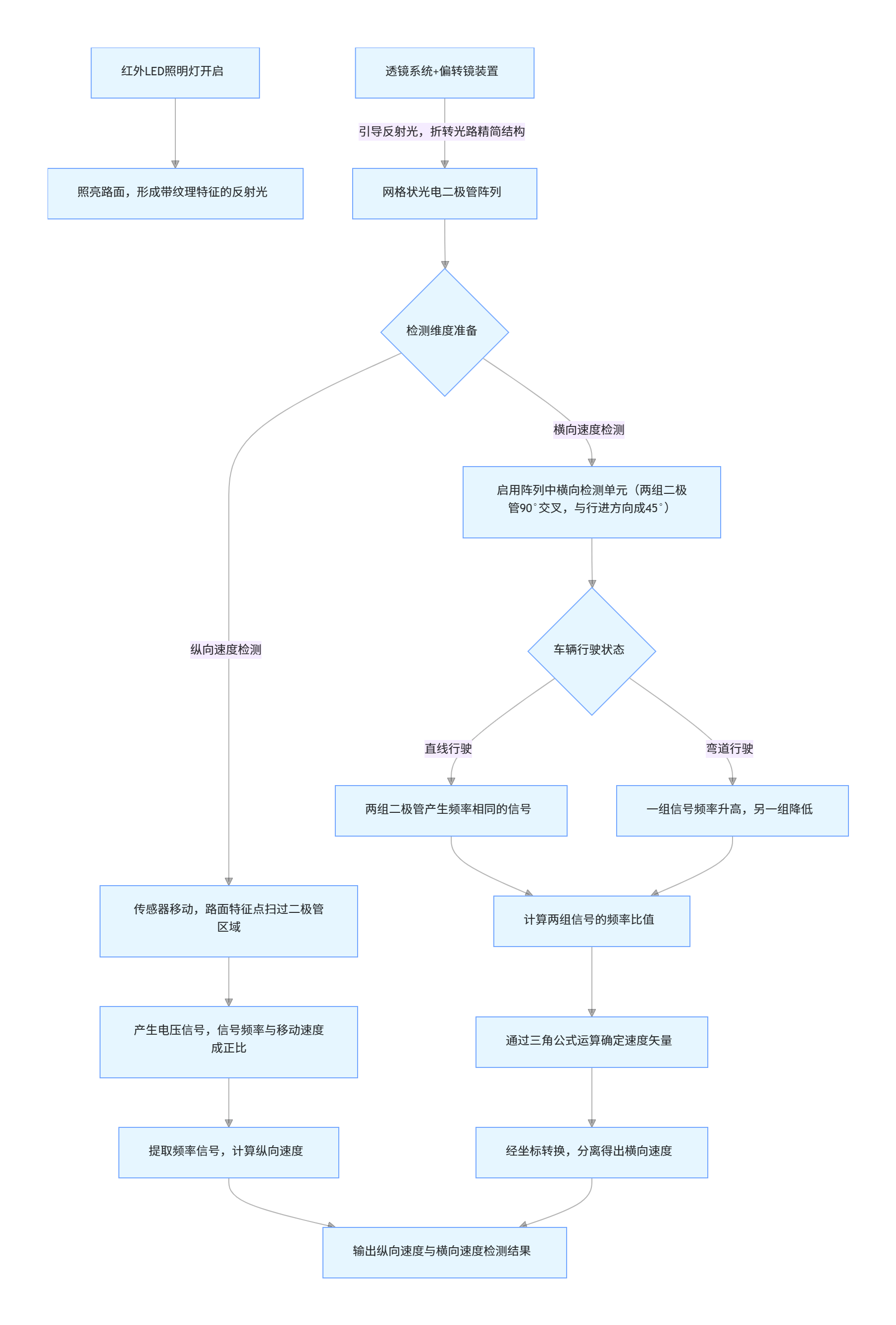
基于成熟的空间滤波法,红外LED照明灯照亮路面,通过透镜系统与偏转镜装置,将带有路面纹理特征的反射光引导至网格状光电二极管阵列。偏转镜实现光路折转,使传感器结构更加紧凑。
传感器移动时,表面结构特征点依次扫过二极管区域,产生相应电压信号。信号频率与移动速度成正比,可用于速度测量。
为测量横向速度,光电二极管阵列特别增加了横向检测单元,两组二极管区域以90°夹角交叉布置,与行进方向成45°夹角。
车辆直线行驶时,两组二极管组产生的信号频率相同;车辆沿弯道行驶时,地面结构特征以一定角度穿过二极管区域,导致一组频率升高、另一组频率降低。
根据两组频率的比值关系,通过三角公式运算即可确定速度矢量,经坐标转换后可分别得出纵向与横向速度。
技术优势
1.采用非接触、无滑动测量原理
2.可在几乎所有路面进行测量
3.成熟可靠的认证技术
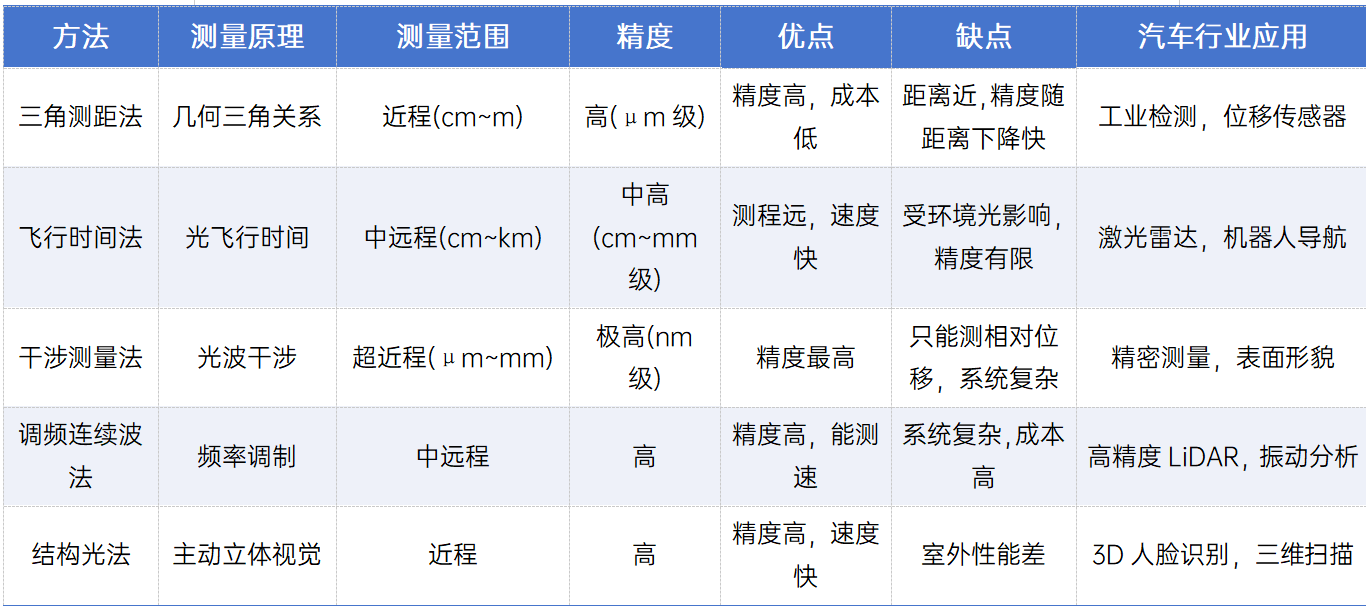
技术拓展:光学测距方法专业解析
2 惯性之“核”
虹科OMS 7传感器内置的IMU单元提供了基准的加速度与角速度数据。
该传感器所使用的IMU是一个完整的惯性系统,由一个三轴陀螺仪和一个三轴加速度计组成,采用基于MEMS(微机电系统)技术的IMU,将微型化的机械和电子元件集成在一块微芯片上,尺寸仅为几毫米,可安装在传感器内部光学元件的旁边。
3 融合之“智”
通过独有的传感器融合算法,OMS 7将光学数据与惯性数据进行实时、深度的耦合分析,弥补纯惯性测量的漂移问题,实现对速度、角度等物理量的直接、实时测量。
技术融合优势 technical strenghth
01 更高精度与可靠性:
虹科OMS 7传感器利用光学信号的长期稳定性弥补了IMU的固有漂移,同时利用IMU的高动态特性增强了系统的瞬时响应能力,从而形成了一个兼具高精度与高可靠性的传感器系统,并将整体信号噪声降至极低。
02 测量效率显著提升:
虹科OMS 7光学传感器可直接测量运动变量, 从根本上避免了传统积分算法带来的误差累积,因此无需进行耗时的数据后处理与修正,实现了从数据采集到结果输出的高效闭环。
03 多数据维度与卓越动态性能:
单个OMS7传感器即可实时输出超过40种车辆运动状态信号,所有这些信号都可用于精确测量车辆的运动状态,全面覆盖测试需求。结合高达1 kHz的采样率,使其能够精准捕获并处理动态换道等极端瞬态工况下的车辆动态。
04 极强的环境适应性与部署便捷性 :
坚固的设计保证了传感器在从极寒到极热的各种恶劣环境下均能连续稳定运行,还可安装在车辆的任何位置。同时,单一传感器的集成化设计简化了安装与校准流程,极大提升了测试部署的效率和适用范围。
03 四大卓越优势,重塑测试体验
极致精度,洞悉微末
虹科OMS 7传感器的角度测量精度最高可达0.1°,关键参数测量精度达到0.1%,适用于车辆底盘微振动分析、机械臂末端抖动监测等精密应用。
即装即用,化繁为简
无需卫星信号、无需昂贵的校准实验室、无需复杂的现场标定,只需将OMS 7传感器直接安装在测试平台上,通电即可开始工作,一分钟内输出可靠数据,极大提升了测试效率。
全维数据,一览无遗
单个传感器即可构建完整的运动感知模型,无需整合多个异构传感器,保证了数据在时间与空间上的绝对同步性。
智能软件,轻松配置与集成
通过网页式配置界面,无需安装专用软件,使用浏览器即可完成所有参数配置、实时数据可视化与测量任务管理,实现轻量级、跨平台的专业级测量体验。
04 汽车行业应用场景深度解析
赛车性能开发:
在F1等顶级赛事中,通过直接测量过弯时的横向加速度与车身姿态角,为空气动力学套件和悬架系统优化提供关键数据;其无漂移的速度测量能力,为极限制动性能评估和轮胎抓地力分析提供可靠依据。
整车及零部件测试:
为乘用车、卡车及特种车辆的制动系统、底盘调校和电子稳定系统标定提供基准数据,通过光学直接测量实现不同轮胎、制动器配置的客观性能对比,有效验证ABS/ESC系统的控制精度。
自动驾驶系统验证:
作为“地面真值”传感器,为自动驾驶算法的测试验证提供高精度运动基准,通过同步输出无累积误差的速度、加速度和姿态数据,确保感知系统、定位模块和控制系统评估的准确性。
轨道交通认证:
在列车制动性能测试中,克服传统测量方式的局限性,提供不受车轮空转打滑影响的精确制动距离和减速度曲线,为安全认证提供权威数据支撑。
检验认证与道路测绘:
为第三方检测机构提供独立可靠的运动测量基准,确保道路附着系数测试、高精度地图采集等服务的准确性与公信力,满足严格的行业认证要求。
结语
在汽车测试和智能驾驶迅速迭代的今天,车辆动态性能的深度挖掘已成为行业刚需。虹科OMS光学传感器,以光学-IMU深度融合技术突破传统测量瓶颈,为工程师提供超越GPS局限的动态真相。
OMS 7光学传感器通过融合空间滤波光学测速与IMU数据,从根本上解决了传统惯性测量的积分漂移和GPS信号丢失问题。它能直接输出无累积误差的多维运动数据,为车辆动态测试、底盘标定和自动驾驶验证提供了即装即用的高精度“地面真值”,极大提升了测试效率和数据可靠性。
本文作者:虹科技术工程师 谭锦标
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 光学传感器
-
汽车电子之传感器分析2016-01-15 5560
-
汽车轮速传感器测试(模拟)系统2017-04-18 13713
-
请问怎么用传感器来测量汽车的轴距从而测量汽车型号?2019-07-02 1620
-
如何布局汽车传感器、汽车雷达测试设备2020-08-04 2765
-
汽车传感器通用测试系统有什么特点?2021-05-12 2071
-
基于光学传感器技术的光学测量仪对汽车行业的影响2022-06-27 1390
-
虹科分享|虹科Dimetix激光测距传感器如何利用反射来测量?(下)2022-12-15 1512
-
虹科带你来了解一下汽车以太网和TSN的测试标准2021-12-22 6017
-
【虹科动态】第九届中国国际汽车技术展览会——虹科测试测量团队展会回顾2022-07-26 1295
-
虹科分享 | 虹科Dimetix激光测距传感器如何利用反射来测量?(下)2022-12-16 1267
-
虹科在上海汽车测试展和IME的精彩表现2023-08-18 1525
-
虹科分享 | 打破汽车动态测量困局, 虹科OMS光学传感器重塑汽车测试精度标杆2025-10-24 776
-
虹科动态 | 虹科×长城汽车技术交流日圆满落幕!2025-11-28 2360
-
虹科PSI5传感器编程应用:汽车可靠数据传输的实现方案2025-12-04 824
全部0条评论

快来发表一下你的评论吧 !
