

创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—ROS2系统使用说明
电子说
描述
前 言
本文档主要介绍创龙科技TL3588-EVM评估板演示基于Debain的ROS系统(版本:ROS2 Foxy)使用说明,包括镜像编译、镜像替换,以及ROS系统测试的方法。适用开发环境如下。
Windows开发环境:Windows 7 64bit、Windows 10 64bit
虚拟机:VMware16.2.5
Linux开发环境:Ubuntu20.04.6 64bit
U-Boot:U-Boot-2017.09
Kernel:Linux-5.10.160
Debian:Debian 11
Docker:24.0.5
ROS:ROS2 Foxy
LinuxSDK:LinuxSDK-[版本号](基于rk3588_linux_release_v1.2.1_20230720)
ROS(Robot Operating System,下文简称"ROS")是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。
我司提供的ROS系统相关资料位于产品资料“4-软件资料Demoplatform-demosros2_foxy”目录下,具体说明如下表所示。
 表 1
表 1
我司提供的LinuxSDK-[版本号].tar.gz开发包已自带Debian系统,位于LinuxSDK源码目录下(如下图)。
 图 1
图 1
请先按照调试工具安装、开发环境搭建相关文档,安装SecureCRT串口调试终端、VMware虚拟机等相关软件,按照《Debain系统使用手册》解压安装LinuxSDK开发包至Ubuntu。
无特殊说明情况下,本文默认使用USB TO UART2作为调试串口,使用SD启动卡(Micro SD方式)启动系统,使用HDMI线将HDMI显示器与评估板HDMI OUT接口连接,通过路由器与PC机进行网络连接,请确保PC机、Ubuntu系统可正常访问互联网。
ROS系统测试
我司提供的ROS系统启动镜像文件update.img位于产品资料“4-软件资料Demoplatform-demosros2_foxybin”目录下,请先参考《系统启动卡制作及系统固化》文档,将镜像文件update.img通过“瑞芯微创建升级磁盘工具”制作SD启动卡(即ROS系统启动卡),然后将SD启动卡插至评估板Micro SD卡槽。亦可通过USB固化方式将系统固化至eMMC。
备注:目前暂不支持通过SD升级卡固化系统至eMMC方式。
基于Python的通信功能测试
执行如下命令,配置评估板测试环境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
 图 2
图 2
执行如下命令,创建Log目录,用于保存ROS程序运行的Log。
Target# mkdir -p /root/.ros/log
 图 3
图 3
执行如下命令,启动ROS节点订阅消息。
Target# ros2 run demo_nodes_py listener &
 图 4
图 4
执行如下命令,启动ROS节点发布消息,实现订阅消息节点与发布消息节点之间的通信。此时评估板串口调试终端将会打印两节点间通信的信息,如下图所示。按"Ctrl + C"可退出测试程序,即让发布消息的节点退出。
Target# ros2 run demo_nodes_py talker
 图 5
图 5
执行如下命令,查看并根据系统进程号关闭所有ROS节点。进程号请以实际情况为准。
Target# ps -a
Target# kill 2835
Target# kill 2836
 图 6
图 6
基于C++的通信功能测试
执行如下命令,配置评估板测试环境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
 图 7
图 7
执行如下命令,启动ROS节点订阅消息。
Target# ros2 run demo_nodes_cpp listener &
 图 8
图 8
执行如下命令,启动ROS节点发布消息,实现订阅消息节点与发布消息节点之间的通信。此时评估板串口调试终端将会打印两节点间通信的信息,如下图所示。按"Ctrl + C"可退出测试程序,即让发布消息的节点退出。
Target# ros2 run demo_nodes_cpp talker
 图 9
图 9
执行如下命令,根据系统进程号关闭所有ROS节点。进程号请以实际情况为准。
Target# ps -a
Target# kill 3539
Target# kill 3540
 图 10
图 10
小海龟测试
请使用HDMI线将HDMI显示器与评估板HDMI OUT接口连接。然后执行如下命令,配置评估板测试环境。
Target# export COLCON_CURRENT_PREFIX=/opt/ros
Target# source /opt/ros/local_setup.sh
图 11
执行如下命令,后台运行小海龟程序。
Target# ros2 run turtlesim turtlesim_node &
 图 12
图 12
 图 13
图 13
执行如下命令,发布话题消息,使小海龟转圈。
Target# ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"
 图 14
图 14
参数解析:
ros2 topic pub:发布消息到主题;
--rate 1:发布消息速率,设置为1次每秒;
/turtle1/cmd_vel:主题名称;
geometry_msgs/msg/Twist:发布消息类型;
{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}:发布消息的内容,线速度(linear)为x方向上的2.0、角速度(angular)为z轴方向上的1.8。
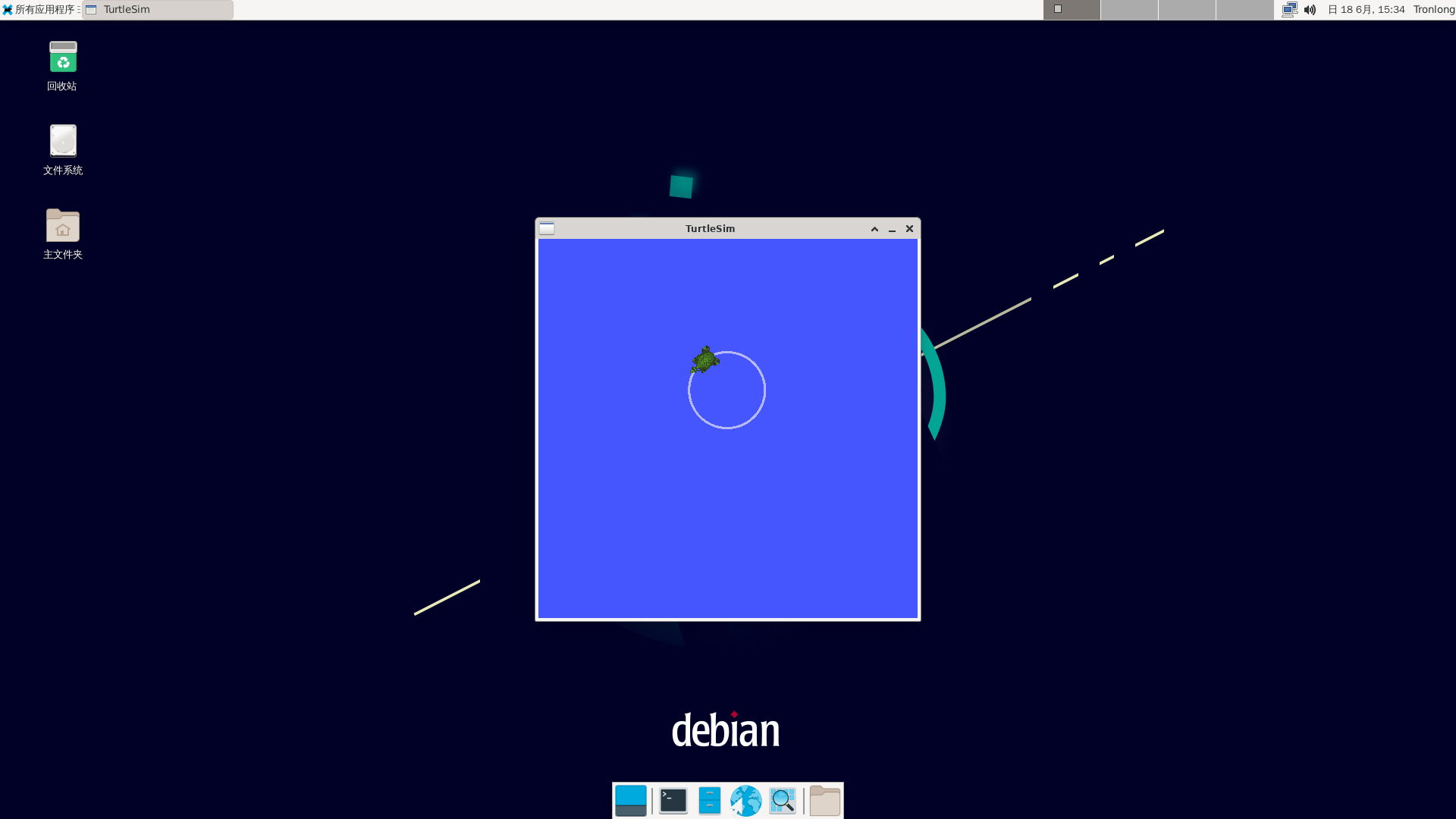 图 15
图 15
由于篇幅过长等原因,部分内容均不逐一展示,如需获取完整版详细资料,请关注创龙科技微信公众号或官网,或者评论区留言,感谢您的支持!
审核编辑 黄宇
-
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—调试工具安装2025-09-16 1549
-
迅为瑞芯微iTOP-3588开发板/核心板2025-04-16 2430
-
迅为iTOP-RK3588S开发板/核心板瑞芯微RK3588S处理器6TOPS算力内置NPU2025-04-10 2458
-
iTOP-3588开发板采用瑞芯微RK3588处理器四核心架构GPU内置独立NPU强大的视频编解码2025-04-09 2400
-
全国产!RK3588(2.4GHz八核AI 6T NPU 8K麒麟)工业核心板规格书2025-03-11 4135
-
Banana Pi开源社区基于瑞芯微RK3588开发板,DeepSeek开发利器2025-02-19 5172
-
迅为RK3588与3588S开发板/核心板选型硬件的区别2024-12-20 3395
-
迅为瑞芯微RK3588开发板深度剖析丨首选的性能2024-10-17 2945
-
探索巅峰性能 |迅为瑞芯微RK3588开发板/核心板深度剖析2024-09-25 3123
-
迅为瑞芯微RK3588与3588S如何选型硬件区别2024-09-11 7471
-
迅为RK3588开发板运行openkylin麒麟系统2024-08-19 3166
-
香蕉派 BPI-W3采用瑞芯微RK3588开源硬件开发板公开发售2023-04-24 1182
-
瑞芯微RK3588开发板RK3588 EVB和RK3588S EVB解读2022-09-22 23970
-
重磅!基于瑞芯微RK3588旗舰芯片打造的MinipcRK3588面世2022-04-04 8861
全部0条评论

快来发表一下你的评论吧 !
