

无人驾驶中多通道雷达系统设计
描述
所有无人驾驶车辆都在很大程度上依赖传感器。 任何导引系统都需要的主要传感器技术是位置识别。 当然,GPS 和地理定位技术均已嵌入大多数智能手机中。 虽然这些系统相当可靠,但仍未可靠到足以满足与传统有人驾驶车辆共用相同公路和街道的个别无人驾驶车辆或车队的需求。
想一下您亲身经历。 有多少次 GPS 定位不准或者效率不佳? 如果没有人类头脑的支持,那么天气条件、电子噪声源以及地图不一致等因素均可导致灾难性的后果。
另一个因素是分辨率。 如果您只需要精确到米,那么如今的 GPS 或许已经足够好了,但如果您需要精确到厘米的分辨率呢? 在以米计量的范围内产生的错误,如果导致越过双黄线,车辆将迎头相撞。 同样地,在沿海公路上产生的米级精度错误,可能导致车辆坠崖。
除位置以外,车辆防撞是自动驾驶汽车的另一项关键技术。 虽然自动驾驶车辆可通过编程来提高驾驶的警惕性,确保其不受交谈、音乐或手机的干扰,但它们还是必须与那些无法做到安全驾驶甚至不遵守交通规则的人类共用马路。 这意味着自导引车辆在恪守其职的同时,还必须结合计划和策略来处理人为错误。
可用的解决方案
对于整体位置感知来说,模块化 GPS 解决方案是不错的选择。 低成本低功耗的小型 GPS 模块可支持多种国际协议,例如中国的北斗卫星导航系统、俄罗斯的 Glonass、欧盟的 Galileo 卫星导航系统 (GNSS) 以及美国的全球定位系统 (GPS) 技术。 Antenova M10478-A3 等模块包含宽带天线,可为上述所有的协议标准提供支持,同时也可提供数据速率高达 115.2 Kbits/秒的基于 UART 的简单接口,几乎能够轻松连接任何标准的嵌入式微控制器。
设计工程师应注意,限制因素往往并非车辆的尺寸和动力,而是灵敏度与扩展温度范围。 Antenova 模块具备 –165 dB 的高灵敏度,其工作温度范围在 –40 到 +80°C 之间。 10 Hz 的固定更新率可帮助确保随时快速获取最新的位置信息,从而让在地面上移动相对缓慢的车辆保持正常行驶。
额定电压电流为 3.3 V、38 mA 的屏蔽式模块本身安装在 28 引脚的 13.8 x 9.5 x 1.8 mm SMT 可安装板上,此板可直接回流到包含嵌入式微控制器的主母板上。 Antenova M10478-A3-U1 的开发和评估板可轻松连接 USB,从而能够快速地测试与评估该解决方案,同时投资少且风险低。
地图内存和数据将获得许可或进行修补来使用 Google 地图等通用的地图解决方案,同时也可能需要 GSM 和互联网连接。 GSM 解决方案也能提供 GPS 功能。 例如,Maestro Wireless Solutions M1003GXT48500 3G GSM 调制解调器集成了 GSM 功能与 GPS 支持,从而能够实现地理定位和 GPS 的功能(图 1)。 这提供了一个备用解决方案,即利用蜂窝信号发射塔和卫星来获取修正。
图 1: GSM 与 GPS 的集成模块可允许卫星连接和蜂窝连接,以实现位置感知。
防撞
检测物体以避免碰撞,是自动导航车辆安全性要求的关键部分。 虽然可从各种渠道获得大量的 CCD 图像传感器和摄像机,但如果工程师需要快速高效地开发传感器算法,那么视频传感器与控制处理器之间应该具备一个灵活的平台。
理想的解决方案是,利用可直接支持视频流的 FPGA 技术来检测边缘、优化图像以及在快速的硬件中执行计算,从而确定靠近物体的速度、方向和接近程度,并进行威胁评估。
Lattice Semiconductor 提供了一个理想的解决方案,此方案搭配其 LFE3-70EA-HDR60-DKN 开发系统,用于 1080p、60 fps 的视频摄像头。 此平台包含一个参考设计和 IP,可与该公司的 LCMXO2-4000HE-DSIB-EVN 图像接口板及其 LF-9MT024NV-EVN Nanovesta 摄像头板配套使用。
此项技术将两个图像传感器合并为一个视频数据流(图 2),能够进行深度感知和更精确的速度与位置感应,并可实现自动白平衡、消除 2D 噪声以及提供行业最快的自动曝光,分辨率高达 1600 万像素。
图 2: 支持两个独立的摄像机和视频流,可进行深度感知,这是无人驾驶车辆的重要优势。
雷达元器件
微型雷达装置目前已广泛应用于汽车行业。 这些装置利用射频技术来确定接近度、范围、速度和相对物体尺寸。
因为汽车行业已将此技术广泛用于其防撞领域,因此,自动停车系统、雷达芯片、元器件、开发系统和子组件均可随时用于无人驾驶车辆的设计。
请注意,多通道雷达系统的设计已经完成并已投入使用,这主要是因为车辆有多个面需要监控。 也能采用诸如升降门检测系统这样的单通道雷达系统,但必须对每一侧、轴以及自主驾驶车辆面临潜在威胁处都装设一组雷达。 例如,前向雷达和侧向雷达适用于避免行人,但自主驾驶车辆也可能需要深度检测来确定路边有沟渠,轮胎漏气等情况下不适合在此处停车。
此领域所使用的元器件可能包括 Texas Instruments AFE5401TRGCTQ1 等零件。 这是一款单片式 4 通道模拟雷达前端,配有集成式低噪声放大器、均衡器、可编程增益放大器、抗混叠以及带有 12 位分辨率的 A/D(图 3)。 特别有趣的是,该额定电压为 1.8 伏的零件允许在所有通道同步采样,并且采样速率高达每秒 2500 万个样本,另外,12 位的兼容并行总线可将采集到的数据快速传输到本地主机控制器。
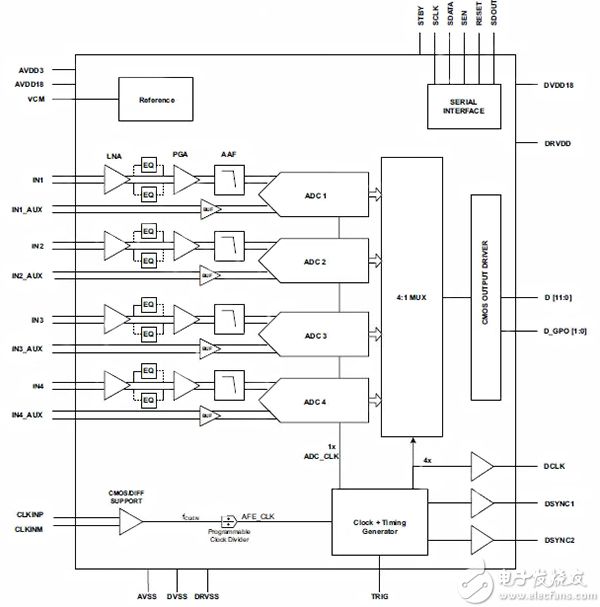
图 3: 多通道单片式雷达装置,例如该 4 通道接收器,是无人驾驶车辆的理想解决方案。
Analog Devices 随其 AD8285WBCPZ 4 通道前端 12 位 ADC 提供了类似的解决方案。 此零件由该公司的 AD8285CP-EBZ RX 路径雷达评估板提供支持,该板使用与 SPI 连接的一体式 FIFO 来灵活捕获数据。
总之,使用自动驾驶车辆进行自动化运送可能在实行初期费用昂贵,也可能面临各种潜在障碍,例如规范和责任等方面的困难。 然而,必要的技术性解决方案(特别是以基于传感器的模块和系统的形式)现在或者即将可供设计工程师使用。 使用 GPS、雷达和视频感测的现今高级辅助驾驶系统(ADAS,例如自适应巡航控制和自动紧急刹车)已经表明,自主驾驶车辆正式上路只是迟早的事。
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2254
-
介绍无人驾驶硬件平台设计2021-09-09 2825
-
无人驾驶汽车的工作原理是什么?2021-06-28 5680
-
无人驾驶分级及关键技术2021-01-21 3250
-
成熟的无人驾驶方案离不开激光雷达2017-10-23 6904
-
激光雷达-无人驾驶汽车的必争之地2017-10-20 6968
-
无人驾驶硬件之传感器平台2017-09-30 3562
-
无人驾驶与自动驾驶的差别性2017-09-28 6543
-
无人驾驶上的车辆传感器2017-04-28 8573
-
无人驾驶电子与安全2017-02-22 4874
-
【话题】无人驾驶汽车,真的要来了么?2016-06-24 10360
-
谷歌欲在英国首推无人驾驶汽车2015-12-14 3095
-
无人驾驶导航平台2014-11-11 9646
全部0条评论

快来发表一下你的评论吧 !
