

SD NAND 接口协议解析:SPI 与 SDIO 模式区别及适配方法
电子说
描述
在嵌入式存储开发中,工程师常会纠结:SD NAND 该用 SPI 模式还是 SDIO 模式?两种接口协议到底有什么区别?为什么同样的芯片换种模式就会出现读写失败?本文从协议本质入手,用通俗语言拆解 SPI 与 SDIO 模式的核心差异,结合SD NAND 的适配特点,讲清不同场景下的选择逻辑和实战方法,帮你避开协议适配的常见坑点。
一、先搞懂基础:接口协议是 “设备沟通的语言”
SD NAND 之所以能被 STM32、GD32 等 MCU 控制,核心是通过 “接口协议” 建立沟通规则 —— 就像两个人交流需要共同语言,SPI 和 SDIO 就是 SD NAND 与 MCU 之间的两种 “语言体系”。
简单说,SPI 是 “简单口语”:语法简单、词汇少,适合对沟通速度要求不高的场景;SDIO 是 “专业术语”:语法复杂、效率高,能快速传输大量数据。两种模式下,SD NAND 的硬件结构完全相同,只是 “说话方式” 不同,这也是为什么同一颗米客方德 SD NAND 可以切换两种模式工作。
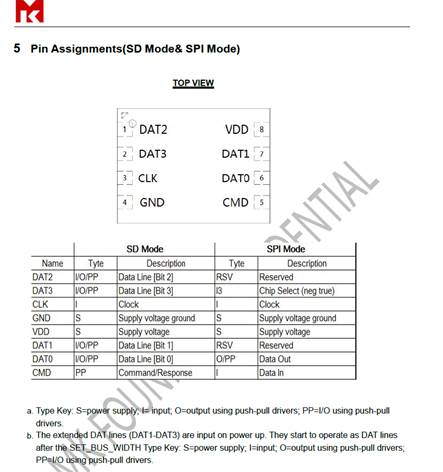
从硬件上看,两种模式共用部分引脚(如电源、地线),但信号引脚有差异:
SPI 模式只需 4 根线:CS(片选)、SCK(时钟)、MOSI(主发从收)、MISO(主收从发);
SDIO 模式需要 6 根线:CMD(命令线)、CLK(时钟)、D0-D3(4 根数据线),支持 “并行传输”。
这就像 SPI 是 “单车道”,一次只能传 1 位数据;SDIO 是 “4 车道”,一次能传 4 位数据,速度自然更快 —— 这是两者最核心的区别。
二、SPI 与 SDIO 模式的 5 大核心区别:从速度到适配场景
要选对模式,先看清两者在关键指标上的差异。以下结合米客方德 8Gb SD NAND(型号 MKDV8GIL-AST)的实测数据,对比核心维度:
| 对比维度 | SPI 模式 | SDIO 模式 |
|---|---|---|
| 最大传输速度 | 约 20-50MB/s(受限于单车道传输) | 约 50-100MB/s(4 车道并行,米客方德实测达 91MB/s) |
| 引脚数量 | 4 根(简单,适合引脚紧张的 MCU) | 6 根(需额外引脚,适合资源充足的 MCU) |
| 兼容性 | 几乎所有带 SPI 接口的 MCU 都支持(如 STM32F103) | 仅支持 SDIO 接口的 MCU(如 STM32F407) |
| 开发难度 | 低(指令少,逻辑简单,新手 1 天可上手) | 中(需处理复杂命令集和时序,依赖成熟库) |
| 适用场景 | 智能门锁、传感器等小数据量场景 | 行车记录仪、高清摄像头等大数据量场景 |
1. 速度差异:为什么 SDIO 比 SPI 快?
SPI 模式下,数据传输是 “串行” 的 —— 每时钟周期只能传 1 位数据(比如 0 或 1),就像用吸管喝饮料,一次只能吸一口;而 SDIO 模式支持 “4 位并行传输”,每时钟周期能传 4 位数据,相当于 4 根吸管同时喝,速度自然翻倍。
米客方德 SD NAND 在两种模式下的实测速度对比很明显:同一颗芯片,SPI 模式顺序读取速度约 35MB/s,切换到 SDIO 模式后可达 91MB/s,对需要存储高清视频的车载设备来说,这种速度差异直接决定了是否会出现 “卡顿丢帧”。
2. 兼容性:不是所有 MCU 都能 “说 SDIO 语言”
SPI 是单片机的 “通用语言”,几乎所有 MCU(从入门级的 STM32F103 到高端的 STM32H7)都带 SPI 接口,就像普通话人人会说;而 SDIO 是 “专业语言”,只有中高端 MCU(如 STM32F4、F7 系列)才带 SDIO 接口,低端 MCU 根本 “听不懂”。
这也是为什么米客方德在设计 SD NAND 时,默认兼容 SPI 模式 —— 确保即使是最基础的嵌入式设备,也能轻松驱动,而 SDIO 模式则作为 “高性能选项”,供有需求的场景启用。
3. 开发难度:SPI 像 “搭积木”,SDIO 像 “拼乐高”
SPI 模式的指令集非常简单,核心指令只有 “读”(0x13)、“写”(0x02)、“擦除”(0xD8)等十几种,就像用几个基础积木就能搭出造型;而 SDIO 模式遵循 SD 协议规范,有上百条命令(如 CMD0 初始化、CMD17 读单块),还需要处理 CRC 校验、状态响应等复杂逻辑,就像拼精密乐高,一步错就可能整体失败。
好在米客方德提供了两种模式的参考代码:SPI 模式的驱动代码只有 300 多行,新手照葫芦画瓢就能用;SDIO 模式则适配了 ST 的 HAL 库,直接调用 HAL_SD_ReadBlocks() 等现成函数,能大幅降低开发难度。
三、实战适配:SPI 与 SDIO 模式的接线与初始化方法
选对模式后,关键是做好硬件接线和软件初始化。以下以米客方德 SD NAND 为例,分步骤讲解两种模式的适配要点。
1. SPI 模式适配:4 线接线 + 3 步初始化
硬件接线(以 STM32F103 为例)
米客方德 SD NAND 的 SPI 引脚定义清晰,接线时只需对应连接:
SD NAND 的 CS 接 STM32 的 PA4(GPIO 引脚,用于片选);
SCK 接 STM32 的 PA5(SPI1_SCK 时钟线);
MOSI 接 STM32 的 PA7(SPI1_MOSI 主机发送线);
MISO 接 STM32 的 PA6(SPI1_MISO 主机接收线);
VCC 接 3.3V 电源,GND 接地线(注意:绝对不能接 5V,会烧毁芯片)。
软件初始化 3 步走
SPI 模式的初始化逻辑简单,核心是让 SD NAND 进入 “可通信状态”:
c
运行
// 步骤 1:配置 SPI 接口(STM32 侧)
HAL_SPI_Init(&hspi1); // 配置 SPI 时钟极性 0、相位 0,波特率 10MHz
// 步骤 2:发送初始化指令(唤醒 SD NAND)
SD_NAND_CS_LOW(); // 拉低片选,选中芯片
HAL_SPI_Transmit(&hspi1, 0xAB, 1, 100); // 发送唤醒指令
HAL_SPI_Receive(&hspi1, &resp, 1, 100); // 接收响应(0x01 表示就绪)
SD_NAND_CS_HIGH();
// 步骤 3:验证连接(读 ID 确认芯片型号)
SD_NAND_CS_LOW();
HAL_SPI_Transmit(&hspi1, 0x9F, 1, 100); // 读 ID 指令
HAL_SPI_Receive(&hspi1, id, 3, 100); // 米客方德厂商 ID 为 0x92
SD_NAND_CS_HIGH();
米客方德 SD NAND 的 SPI 初始化成功率接近 100%,很少出现 “唤醒失败”,新手按此步骤操作,10 分钟就能完成初始化。
2. SDIO 模式适配:6 线接线 + 依赖库函数
硬件接线(以 STM32F407 为例)
SDIO 模式需要 6 根线,接线时注意数据线的对应:
SD NAND 的 CMD 接 STM32 的 PD2(SDIO_CMD 命令线);
CLK 接 STM32 的 PC12(SDIO_CLK 时钟线);
D0 接 STM32 的 PC8,D1 接 PC9,D2 接 PC10,D3 接 PC11(4 根数据线);
电源和地线同 SPI 模式(3.3V 供电)。
软件初始化:依赖 HAL 库简化操作
SDIO 模式的初始化复杂,建议直接用 STM32 的 HAL 库函数,核心步骤:
c
运行
// 步骤 1:初始化 SDIO 接口
HAL_SD_Init(&hsd); // 配置时钟 48MHz,总线宽度 4 位(D0-D3)
// 步骤 2:检测卡并初始化
HAL_SD_GetCardInfo(&hsd, &card_info); // 获取卡信息(容量、类型等)
// 步骤 3:验证读写(读一个扇区测试)
uint8_t buf[512];
HAL_SD_ReadBlocks(&hsd, buf, 0x00, 1, 1000); // 读 0 扇区数据
米客方德 SD NAND 对 SDIO 协议的兼容性做了优化,能快速通过 HAL 库的初始化检测,不像有些品牌需要反复调试时序参数。
四、模式选择指南:3 个维度判断用 SPI 还是 SDIO
实际开发中,两种模式没有绝对优劣,关键看场景适配。结合米客方德的客户案例,总结出 3 个判断维度:
1. 看设备 “数据量”:小数据用 SPI,大数据用 SDIO
如果设备只是存储少量日志(如智能门锁的开锁记录,每天几十 KB),SPI 模式完全够用,还能省引脚;
如果是存储高清视频(如行车记录仪每秒 10MB 数据),必须用 SDIO 模式,否则会因速度不够导致数据丢失。米客方德的车载级 SD NAND 就常搭配 SDIO 模式,确保 4K 视频连续录制不卡顿。
2. 看 MCU “接口资源”:低端用 SPI,高端用 SDIO
若用 STM32F103、GD32F130 等低端 MCU(只有 SPI 接口),只能选 SPI 模式;
若用 STM32F407、NXP i.MX RT 等中高端 MCU(带 SDIO 接口),且需要高速传输,优先选 SDIO 模式。
3. 看开发 “时间成本”:赶进度用 SPI,求性能用 SDIO
SPI 模式的驱动开发最快 1 天就能完成,适合项目周期紧的场景;SDIO 模式虽然速度快,但调试周期可能长达 3-5 天(需处理各种协议细节)。米客方德提供的 SDIO 例程已在多个平台验证过,能将调试时间压缩到 1 天内。
五、避坑指南:两种模式的 4 个常见错误及解决方法
1. SPI 模式:数据读写错位?检查 “地址对齐”
新手常犯的错误是 “扇区地址没对齐”(比如写地址 0x123 而非 0x200 的整数倍),导致数据错位。解决方法:在驱动里强制地址对齐,确保 addr % 512 == 0(1 扇区 = 512 字节)。米客方德的 SPI 驱动例程里自带地址校验功能,能自动规避这个问题。
2. SDIO 模式:初始化失败?排查 “时钟频率”
SDIO 模式对时钟频率敏感,若初始化时时钟超过 400kHz(卡识别阶段的限制),会导致卡不响应。解决方法:初始化阶段用 100-400kHz 时钟,识别成功后再切换到 48MHz 高速模式。米客方德的 datasheet 里附有详细的时钟配置步骤,按文档操作即可避免。
3. 两种模式:通信不稳定?查 “电源滤波”
SD NAND 对电源噪声敏感,若电源波动大,两种模式都会出现读写错误。解决方法:在 VCC 引脚旁并联 1 个 104 电容(0.1μF)滤波,米客方德的评估板已集成滤波电路,参考其设计可大幅提升稳定性。
4. 模式切换:换模式后芯片不工作?重新 “唤醒初始化”
同一颗 SD NAND 从 SPI 切换到 SDIO 模式时,必须重新上电并执行初始化流程,否则会因模式冲突导致不响应。米客方德的芯片支持 “热切换”,但建议实际开发中通过硬件复位引脚(若有)强制重启,确保模式切换可靠。
六、协议只是工具,适配场景才是关键
SPI 和 SDIO 模式就像 SD NAND 的 “两副面孔”:SPI 简单易用,适合小数据、低资源场景;SDIO 高速高效,适合大数据、高性能需求。米客方德 SD NAND 之所以能在两种模式下都表现稳定,核心是其控制器对协议细节做了深度优化 —— 无论是 SPI 的指令兼容性,还是 SDIO 的时序匹配,都经过大量场景验证。
最后提醒:选型时不必盲目追求 “高速模式”,先明确设备的数据量、MCU 资源和开发周期,再结合本文的适配方法,就能让 SD NAND 发挥最佳性能。如果仍有疑问,米客方德提供的技术手册里有更详细的模式切换指南和驱动代码,新手可直接参考复用。
审核编辑 黄宇
-
什么是SD NAND存储芯片?2024-01-05 4788
-
【资料分享】SDIO接口介绍( 有SD和SDIO区别)2014-03-12 4618
-
解决主控SPI接口如何使用SD NAND的问题纠结2019-04-12 3282
-
SPI接口MCU如何使用搭配CS品牌SD NAND2019-09-24 1193
-
TF卡和SD NAND的具体区别2022-07-12 7336
-
SD NAND 的 SDIO在STM32上的应用详解(上篇)2022-11-15 10674
-
rt-thread SDIO驱动框架分析(SD卡flash驱动\SD Nand flash驱动)2023-04-04 2943
-
SD NAND 的 SDIO在STM32上的应用详解(中篇)2022-11-25 3207
-
SD nand 与 SD卡的SPI模式驱动2023-05-10 3216
-
SD NAND和SPI NAND的区别2024-06-04 4326
-
SD NAND、SPI NAND和eMMC的区别对比分析2024-07-02 5067
-
SD NAND SPI模式:如何实现低功耗运行2024-09-02 1531
-
瀚海微SD NAND之SD 协议(36)SPI模式2024-10-08 1607
-
ESP32 驱动瀚海微SD NAND 完整方案 + FAT/FAT32 驱动核心区别2026-02-02 1100
-
NAND科普:MK米客方德 SD NAND 和 SPI NAND的区别和应用2026-05-19 992
全部0条评论

快来发表一下你的评论吧 !
