

突破传统!AI、3D相机与边缘计算打造智能运动系统
描述
在工业自动化和机器人技术领域,运动控制一直以精度、速度和可靠性为核心。然而,随着自动化系统越来越多地在非结构化、动态环境中运行,例如有人工操作的工厂、库存布局不断变化的仓库、有机体运动频繁的手术室,一个新的维度变得至关重要:智能。
要实现真正智能的运动系统,必须融合三项关键技术:人工智能(AI)、3D 相机和边缘计算。三者结合,使机器不仅能精准移动,还能实时感知、理解并适应周围环境。
Part 01
立体视觉的重要性
传统运动系统通常依赖编码器、2D 相机或接近传感器进行反馈。这些方法在受控环境中表现良好,但在面对突发情况时则显得力不从心。
立体视觉通过实时生成丰富、密集的 3D 环境地图来填补这一空白。与 LiDAR 或 ToF 传感器不同,立体相机通过模拟人类视觉被动计算深度,利用图像差异重建完整的深度世界。这使得它们:

这在光照变化较大或无法实现主动照明的环境中尤其有价值,例如室外空间、人机交互区域或移动机器人平台。立体视觉的被动设计和丰富的视觉环境使其成为实时AI应用的首选传感方式。
Part 02
从视觉到行动:AI的作用
拥有 3D 数据后,下一步是对其进行解释。这正是 AI 模型发挥作用的地方。卷积神经网络(CNN)、Transformer 和强化学习算法可以被训练来:
在传统系统中,这些任务通常依赖硬编码规则。而通过 AI,系统可以从真实世界的变化中学习,随着时间推移不断优化,并处理基于规则逻辑无法应对的边缘情况。
Part 03
边缘计算:无需云端的实时响应
最后一块拼图是边缘计算。为了在毫秒级响应快速变化的环境,AI 驱动的感知与控制必须在机器人本地或现场完成,而不是依赖云端。
这正是像 Bumblebee X 这样的立体视觉系统大放异彩的地方。Bumblebee X 延续了原始 Bumblebee 的可靠性,具备稳定的工厂校准保持能力。其强大的 FPGA 立体处理引擎和最长 20 米的工作距离,使其非常适合大规模环境。它具备高分辨率深度输出、IP67 防护等级外壳,并支持实时 SGBM 和先进的深度学习算法,是工业机器人、检测和自主导航的下一代立体视觉解决方案。其双路径立体处理架构让集成商可以选择:
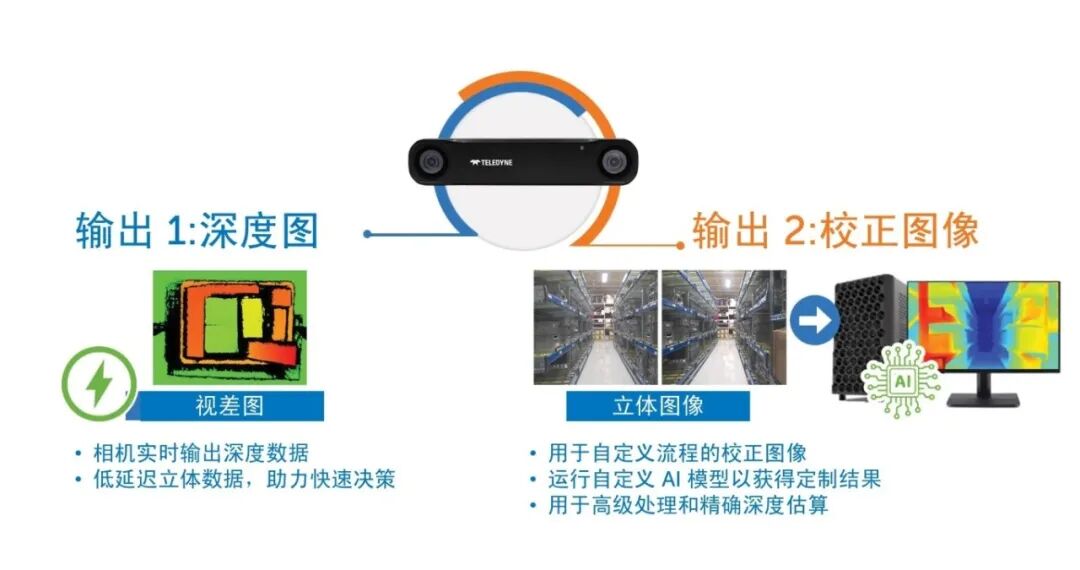
这种灵活性使集成商可以根据应用需求在延迟、准确性和计算成本之间取得平衡,无论是执行精密取放任务的机械臂、在拥挤仓库中导航的 AMR/AGV,还是适应人体组织运动的手术机器人。
Part 04
应用案例
智能机器人取放与户外机器人
想象一个机械臂需要从一堆未知物品中取物。如果每个物品都必须预先定义并固定位置,传统运动控制将难以应对。但通过 Bumblebee X 提供的 3D 数据输入到 AI 模型,机器人可以:

结果是:更快的周期时间、更少的错误,并能处理变化。

立体视觉特别适合户外机器人应用,因为它具备被动感知特性、高空间分辨率以及在光照变化下的稳定性。它使自主机器人能够感知并理解复杂地形、在无需主动光源的情况下检测障碍物,并在非结构化自然环境中保持情境感知。这些能力对于农业、建筑和远程检测任务至关重要。
Teledyne的Bumblebee X黑白立体视觉相机现已开放订购,提供60°、80°和105°视场角的三种型号 (BX-P5G-30M-XC3、BX-P5G-30M-XC5、BX-P5G-30M-XC7)。欢迎联络问询。
-
开源项目 ! 利用边缘计算打造便携式视觉识别系统2024-12-16 2839
-
AI赋能边缘网关:开启智能时代的新蓝海2025-02-15 1544
-
AI 边缘计算网关:开启智能新时代的钥匙—龙兴物联2025-08-09 1823
-
Xsens携手ST展示3D身体运动跟踪系统2012-12-13 3167
-
EdgeBoard FZ5 边缘AI计算盒及计算卡2020-08-31 2732
-
【HarmonyOS HiSpark AI Camera】边缘计算安全监控系统2020-09-25 1285
-
什么是3D相机? 相关资料分享2021-07-02 1801
-
边缘智能市场要素:海量需求,物联网切分2022-08-23 2258
-
再度飞跃!指尖上的3D运动传感控制2013-01-21 145060
-
面向边缘计算和AI应用的智能工业相机2022-06-16 3023
-
3D相机选型指南2022-03-21 6655
-
AGV导航精度怎么更准确?利用3D相机打造更智能的AGV辅助系统2024-06-12 1321
-
奥比中光3D相机打造高质量、低成本的3D动作捕捉与3D动画内容生成方案2024-06-25 2318
-
深视智能3D相机2.5D模式高度差测量SOP流程2024-07-27 2588
-
幻尔科技ArmPi Ultra机械臂,如何用3D深度相机和逆运动学实现手眼协同?2026-06-10 303
全部0条评论

快来发表一下你的评论吧 !
