

智能驾驶汽车仿真测试案例分析
电子说
描述
智能驾驶是当前汽车行业的研究热点。智能驾驶概念涵盖了传统的高级驾驶辅助系统(ADAS)以及全自动驾驶系统(SAE Level 3及以上级别)。由于智能驾驶系统的复杂性,仿真测试验证成为智能驾驶系统开发流程中必不可少的一个环节。
智能驾驶系统一般包括环境感知、智能决策及车辆控制三个部分,相应的,智能驾驶仿真测试环境需要包括道路交通场景仿真、车辆动力学仿真及传感器仿真。
系统特点
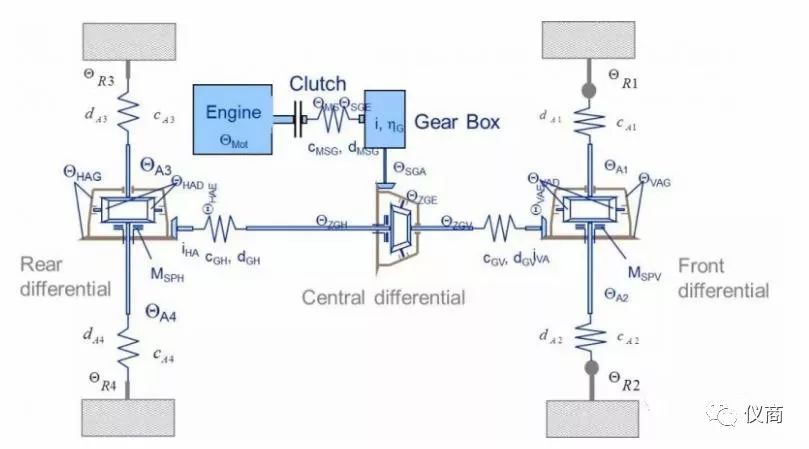
1车辆动力学仿真
动力传动系统:可以模拟传统发动机动力系统、纯电驱动系统、混合动力系统、四轮驱动系统等多种形式
底盘系统:包括多种形式的悬架模型、复杂轮胎模型、转向系统模型、液压/气压制动系统模型以及多体车身动力学(纵向、侧向、垂向)模型
2道路仿真
允许手动搭建各种类型的道路,支持OpenDrive标准高精度道路格式、支持OpenCRG高精度路面描述格式
支持复杂路网结构:三岔路口、十字路口、立交桥等
支持直接导入高精地图数据生成与真实道路高度一致的虚拟道路
3交通仿真
可以模拟各种类型机动车、行人、动物等交通物体
可以自定义每个交通物体的驾驶行为,包括路径规划、速度控制、换道等,支持事件触发模式
可以生成符合交通规则的随机交通流
4环境仿真
可以模拟晴天、多云、阴天、雨、雪等天气
可以模拟白天、黑夜等多种光照条件
5环境感知传感器仿真
对各类传感器均可提供理想环境感知传感器模型,直接输出目标级信息,包括交通物体的类型、位置、速度等信息,道路相关信息、交通标志信息等
毫米波雷达仿真:可提供雷达回波模拟器系统,可集成真实毫米波雷达进行测试
摄像头:支持直接输出摄像头捕捉到的图像,提供视频暗箱或者图像直接注入两种HIL仿真方式。
激光雷达:支持输出点云数据
超声波雷达:提供超声波回波模拟和芯片信号级模拟两种HIL仿真方式
支持多传感器融合
系统应用领域
ADAS决策及控制算法(AEB、ACC、APA、LKA等)的开发与验证
自动驾驶决策及控制的开发与验证
毫米波雷达功能测试和性能测试
图像感知算法的开发
激光雷达点云数据处理算法的开发
-
汽车智能换挡系统的研究2009-12-02 0
-
汽车驾驶员操作特性考核仿真系统的研究2009-12-02 0
-
智能汽车2016-02-01 0
-
汽车驾驶模拟器单片机系统的设计思路介绍2019-07-29 0
-
斯利通在车联网及智能驾驶汽车的效应2020-04-24 0
-
如何进行智能驾驶算法开发?2020-12-15 0
-
智能驾驶开发及测试评估平台分析2020-12-16 0
-
智能驾驶全量数据感知及分析系统2020-12-31 0
-
如何实现无缝驾驶的智能系统?2021-03-09 0
-
智能驾驶数据网络时间同步2021-09-03 0
-
无人驾驶汽车测试方案分析2017-11-07 15608
-
智能网联汽车自动驾驶仿真技术学习笔记(一)2023-06-06 323
-
基于场景的智能网联汽车模拟仿真测试评估方法与实践2023-07-20 3296
-
智能网联汽车模拟仿真测试(上) ——企业模拟仿真测试能力建设2023-08-17 1953
-
智能网联汽车虚拟仿真测试平台2023-11-20 1721
全部0条评论

快来发表一下你的评论吧 !
