

瑞芯微 RK3588 平台 Debian 系统开发案例与使用说明
电子说
描述
前 言
请先按照开发环境搭建文档进行开发环境搭建,由于系统编译过程需下载相关软件工具包,因此请确保Ubuntu可正常访问互联网。本说明文档适用开发环境如下:
Windows开发环境:Windows 7 64bit、Windows 10 64bit
虚拟机:VMware16.2.5
开发环境:Ubuntu20.04.6 64bit
U-Boot:U-Boot-2017.09
Kernel:Linux-5.10.160、Linux-RT-5.10.160
Debian:Debian 11
LinuxSDK:LinuxSDK-[版本号](基于rk3588_linux_release_v1.2.1_20230720)
Debian系统相关软件包位于产品资料“4-软件资料Debian”目录下,具体如下表所示。其中,我司已提供U-Boot、Kernel、Filesystem和Debian系统镜像文件,U-Boot、Kernel、Filesystem源码位于LinuxSDK开发包内。
备注:我司推荐使用最新版本的LinuxSDK,亦可根据“4-软件资料DebianLinuxSDKLinuxSDK-feature-support.pdf”的变更说明,自行替换对应模块(如device/rockchip)至旧版本LinuxSDK进行使用。
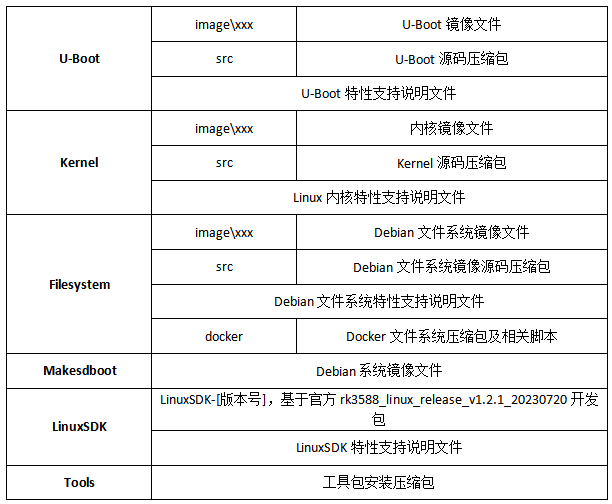 表 1
表 1
LinuxSDK安装
安装依赖软件
执行如下命令,安装LinuxSDK开发包依赖软件。
备注:安装过程中,请保证Ubuntu可正常访问互联网,若提示"*** is already the newest version ***"表示该软件已安装,请忽略。
Host# sudo apt-get install -y git ssh make gcc libssl-dev
liblz4-tool expect expect-dev g++ patchelf chrpath gawk texinfo chrpath
diffstat binfmt-support qemu-user-static live-build bison flex fakeroot
cmake gcc-multilib g++-multilib unzip device-tree-compiler ncurses-dev
libgucharmap-2-90-dev bzip2 expat gpgv2 cpp-aarch64-linux-gnu libgmp-dev
libmpc-dev libmpfr-dev
 图 1
图 1
 图 2
图 2
执行如下命令,将Python2和Python软链接为Python3。
Host# sudo ln -s /usr/bin/python3 /usr/bin/python2
Host# sudo ln -s /usr/bin/python3 /usr/bin/python
Host# ls -al /usr/bin/python*
 图 3
图 3
执行如下命令,查看Python版本,确认是否链接成功。
备注:Python版本需3.8.0及以上。
Host# python --version
Host# python2 --version
 图 4
图 4
请将产品资料“4-软件资料DebianTools”目录下的LZ4_old1-dev.zip压缩包拷贝至Ubuntu,执行如下命令进行解压。
Host# unzip LZ4_old1-dev.zip
 图 5
图 5
执行如下命令,进行安装LZ4。
Host# cd LZ4_old1-dev/
Host# make
Host# sudo make install
Host# sudo install -m 0755 lz4 /usr/bin/lz4
 图 6
图 6
 图 7
图 7
执行如下命令,查看LZ4版本信息。
备注:LZ4版本需v1.9.3及以上。
Host# lz4 -v
 图 8
图 8
执行如下命令,安装PPA。
Host# sudo apt install software-properties-common
 图 9
图 9
执行如下命令,向PPA中更新Git软件源,需按回车键确认更新。
Host# sudo add-apt-repository ppa:git-core/ppa
 图 10
图 10
执行如下命令,更新软件列表并安装Git。
备注:安装时长受网络速率影响,请耐心等待。
Host# sudo apt-get update
Host# sudo apt-get install git
 图 11
图 11
 图 12
图 12
执行如下命令,查看Git版本信息。
备注:建议将版本更新至2.38.0及以上,以免因版本过低导致LinuxSDK编译失败。
Host# git -v
 图 13
图 13
请将产品资料“4-软件资料DebianTools”目录下的live-build-master.zip压缩包拷贝至Ubuntu系统live-build目录下,执行如下命令新建live-build目录,并进行解压。
Host# mkdir live-build
Host# cd live-build
Host# unzip live-build-master.zip
 图 14
图 14
 图 15
图 15
执行如下命令,安装live-build-master相关文件。
Host# cd live-build-master
Host# sudo apt-get remove live-build
Host# git clone https://salsa.debian.org/live-team/live-build.git --depth 1 -b debian/1%20230131
 图 16
图 16
执行如下命令,编译相关配置。
Host# cd live-build
Host# rm -rf manpages/po/
Host# sudo make install -j8
 图 17
图 17
解压LinuxSDK
由我司提供的LinuxSDK-[版本号].tar.gz开发包位于产品资料“4-软件资料DebianLinuxSDK”目录下,基于瑞芯微的rk3588_linux_release_v1.2.1_20230720进行开发。
打开Ubuntu,执行如下命令,创建RK3588工作目录。
Host# mkdir -p /home/tronlong/RK3588
 图 18
图 18
请将LinuxSDK开发包拷贝至RK3588工作目录,执行如下命令,将LinuxSDK开发包解压至RK3588工作目录。耗时5min后解压完成,生成rk3588_linux_release_v1.2.1文件夹,即为LinuxSDK源码目录。为了减少LinuxSDK大小,通过repo进行压缩,压缩后在LinuxSDK源码目录下生成.repo的隐藏目录。
备注:LinuxSDK版本号以实际情况为准。
Host# cd /home/tronlong/RK3588/
Host# tar -zxf LinuxSDK-v2.0.tar.gz
 图 19
图 19
执行如下命令,查看当前LinuxSDK源码目录。
备注:LinuxSDK-v2.5.tar.gz及以上版本,无需从repo仓库更新LinuxSDK源码。
Host# cd rk3588_linux_release_v1.2.1/
Host# ls -al
 表 2 LinuxSDK源码目录结构
表 2 LinuxSDK源码目录结构
 图 20
图 20
解压Debian dl压缩包
请将产品资料“4-软件资料DebianLinuxSDK”目录下的dl.tar.gz压缩包拷贝至"RK3588/rk3588_linux_release_v1.2.1/buildroot/"目录。dl.tar.gz压缩包用于存放从官网下载的开源软件包,LinuxSDK编译时可从该目录获取开源包,以节约下载时间,提高编译效率,且能避免因网络环境差异导致编译失败的问题。
 图 21
图 21
执行如下命令,将dl.tar.gz压缩包解压至当前目录。
Host# tar -zxf dl.tar.gz
 图 22
图 22
Debian系统镜像编译、生成
配置编译选项
进入LinuxSDK源码目录,执行如下命令配置编译选项。
Host# ./build.sh device/rockchip/rk3588/tl3588_evm_defconfig
 图 23
图 23
配置编译设备树文件
由于部分外设功能之间存在引脚复用关系,因此需通过不同的设备树文件进行配置。我司提供的设备树文件位于LinuxSDK源码"kernel/arch/arm64/boot/dts/rockchip/"目录,具体说明如下。
 表 3
表 3
评估板使用的设备树文件存在多级的依赖关系,具体如下表所示。表中的下一级设备树文件,被上一级设备树文件所引用。
 表 4
表 4
LinuxSDK默认编译的设备树文件为tl3588-evm.dts,如需替换为支持对应功能的其他设备树,请参考以下步骤修改。本次操作以替换为tl3588-evm-edp.dts设备树进行演示,如需使用支持其它设备树,修改方法同理。
执行如下命令,修改"device/rockchip/rk3588/tl3588_evm_defconfig"文件。
Host# vi device/rockchip/rk3588/tl3588_evm_defconfig
 图 24
图 24
修改内容如下:
#RK_KERNEL_DTS_NAME="tl3588-evm" //添加注释符"#"
RK_KERNEL_DTS_NAME="tl3588-evm-edp" //删除注释符"#"
 图 25
图 25
执行如下命令,配置编译选项。
Host# ./build.sh device/rockchip/rk3588/tl3588_evm_defconfig
 图 26
图 26
配置内核选项
我司默认配置的是Linux内核(推荐使用)。如需修改内核编译选项配置,请继续执行"make xxx menuconfig"命令打开图形配置界面。此命令通过读取当前目录的.config文件,以图形界面的方式提供内核编译配置查看和修改方法。如无需修改内核编译选项配置,可跳过此步骤。
menuconfig是一套图形化的配置工具,需要ncurses库支持。ncurses库提供了一系列的API函数供调用者生成基于文本的图形界面,因此需要先执行如下命令通过网络安装ncurses库。
Host# sudo apt-get install libncurses5-dev
Host# sudo apt-get install libncursesw5-dev
 图 27
图 27
ncurses库安装完成后,执行如下命令打开图形配置界面。
Host# ./build.sh kernel-config
 图 28
图 28
 图 29
图 29
可通过键盘的方向键选中对应菜单栏。在被选中的情况下,可按Enter键进入子菜单。菜单选项中蓝色高亮的字母代表此菜单选项的快捷键,可在键盘上按下对应的字母快速选中对应的菜单选项。每个菜单选项前的括号内容表示当前菜单选项的配置状态。选中对应的菜单选项后,按下Y键,会将相应的选项配置编译到内核中,同时菜单选项前面变为< * >。按下N键,不会将相应的选项配置编译到内核中。按下M键,会将相应的选项配置编译为内核模块,菜单选项前面变为< M >。如需搜索,可按下/键打开搜索框,然后输入要搜索的内容。 图 30 在图形配置界面中,进入"General setup -> Preemption Model (Voluntary Kernel Preemption (Desktop)) ---> "路径,选中"Fully Preemptible Kernel (Real-Time)"选项,即可配置为Linux-RT内核,此时菜单选项前面变为( X )。反之,则配置为Linux内核。 图 31 配置完毕后,可双击Esc键自动保存退出。 图 32 编译LinuxSDK在LinuxSDK安装目录下执行如下命令,一键编译生成U-Boot、Kernel、Debian、Recovery等镜像,并打包生成Debian系统镜像。Host# ./build.sh 图 33 由于当前模式为非root用户,因此在编译过程中若遇到如下提示,请输入用户密码,本次输入Tronlong。 图 34 预计耗时约2小时后编译完成,最终在rockdev目录下生成U-Boot、Kernel、Debian、Recovery等镜像和Debian系统镜像,如下图所示。 图 35 图 36 表 5 镜像文件说明 请参考《系统启动卡制作及系统固化》文档,将Debian系统镜像文件固化至Micro SD卡或eMMC。备注:由于每次执行命令"./build.sh"编译LinuxSDK都会备份output目录下的镜像至"output/TL3588-EVM/DEBIAN/20231221_164609/IMAGES/"目录下,将会占用较多的存储空间,因此请根据实际情况删除无需保留的镜像文件,释放储存空间。 图 37 由于篇幅过长等原因,部分内容均不逐一展示,如需获取完整版详细资料,请关注创龙科技微信公众号或官网,或者评论区留言,感谢您的支持!
审核编辑 黄宇
-
迅为RK3588开发板深度剖析丨首选的性能2024-09-03 2118
-
迅为瑞芯微RK3588与3588S如何选型硬件区别2024-09-11 7413
-
探索巅峰性能 |迅为瑞芯微RK3588开发板/核心板深度剖析2024-09-25 3045
-
迅为瑞芯微RK3588开发板深度剖析丨首选的性能2024-10-17 2903
-
AIoT行业SoC天花板,RK3588瑞芯微旗舰芯片开发板发布!2022-03-07 13684
-
重磅!基于瑞芯微RK3588旗舰芯片打造的MinipcRK3588面世2022-04-04 8808
-
香蕉派瑞芯微 Rockchip RK3588 开发板套件主要硬件规格2022-03-03 13226
-
瑞芯微旗舰芯RK3588开发板开售 比亚迪为应达利颁奖2022-03-25 6095
-
瑞芯微RK3588开发板RK3588 EVB和RK3588S EVB解读2022-09-22 23664
-
瑞芯微RK3588开发板评测Ⅱ——DEBUG&amp;接口调试方法2022-11-02 10222
-
优博终端推出基于瑞芯微RK3588OpenHarmony板卡产品方案2023-03-29 1890
-
Banana Pi开源社区基于瑞芯微RK3588开发板,DeepSeek开发利器2025-02-19 4830
-
瑞芯微 RK3588 平台系统启动卡制作及 eMMC 固化操作手册2025-11-06 1305
-
瑞芯微RK3588 RKNN模型推理环境部署与功能测试技巧(上)2026-04-21 1243
-
瑞芯微RK3588 RKNN模型推理环境部署与功能测试技巧(下)2026-05-07 386
全部0条评论

快来发表一下你的评论吧 !
