

svpwm变频调速原理 详解svpwm与SPWM区别
模拟技术
描述
本文主要是关于svpwm变频调速的相关介绍,并着重对svpwm与SPWM进行了详尽的区分介绍。
SVPWM
SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。传统的SPWM方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。
原理
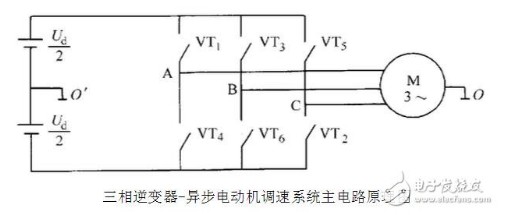
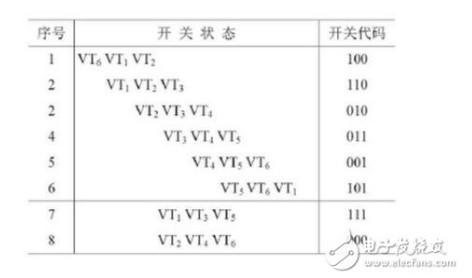
普通的三相全桥是由六个开关器件构成的三个半桥。这六个开关器件组合起来(同一个桥臂的上下半桥的信号相反)共有8种安全的开关状态。 其中000、111(这里是表示三个上桥臂的开关状态)这两种开关状态在电机驱动中都不会产生有效的电流。因此称其为零矢量。另外6种开关状态分别是六个有效矢量。它们将360度的电压空间分为60度一个扇区,共六个扇区,利用这六个基本有效矢量和两个零量,可以合成360度内的任何矢量。
当要合成某一矢量时先将这一矢量分解到离它最近的两个基本矢量,而后用这两个基本矢量去表示,而每个基本矢量的作用大小就利用作用时间长短去代表。用电压矢量按照不同的时间比例去合成所需要的电压矢量。从而保证生成电压波形近似于正弦波。
在变频电机驱动时,矢量方向是连续变化的,因此我们需要不断的计算矢量作用时间。为了计算机处理的方便,在合成时一般是定时器计算(如每0.1ms计算一次)。这样我们只要算出在0.1ms内两个基本矢量作用的时间就可以了。由于计算出的两个时间的总和可能并不是0.1ms(比这小),而那剩下的时间就按情况插入合适零矢量。 由于在这样处理时,合成的驱动波形和PWM很类似。因此我们还叫它PWM,又因这种PWM是基于电压空间矢量去合成的,所以就叫它SVPWM了。
svpwm变频调速原理
SVPWM原理
电压空间矢量PWM(SVPWM)的出发点与SPWM不同,SPWM调制是从三相交流电源出发,其着眼点是如何生成一个可以调压调频的三相对称正弦电源。而SVPWM是将逆变器和电动机看成一个整体,用八个基本电压矢量合成期望的电压矢量,建立逆变器功率器件的开关状态,并依据电机磁链和电压的关系,从而实现对电动机恒磁通变压变频调速。若忽略定子电阻压降,当定子绕组施加理想的正弦电压时,由于电压空间矢量为等幅的旋转矢量,故气隙磁通以恒定的角速度旋转,轨迹为圆形。
SVPWM比SPWM的电压利用率高15%,这是两者最大的区别,但两者并不是孤立的调制方式,典型的SVPWM是一种在SPWM的相调制波中加入了零序分量后进行规则采样得到的结果,因此SVPWM有对应SPWM的形式。反之,一些性能优越的SPWM方式也可以找到对应的SVPWM算法,所以两者在谐波的大致方向上是一致的,只不过SPWM易于硬件电路实现,而SVPWM更适合于数字化控制系统。
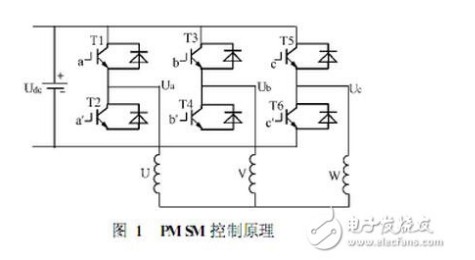
图 1中,开关矢量[ a b c ]T共有8种取值,即6个IGBT的开关状态的组合一共有8个,这8种开关组合决定了8个基本空间矢量,如图3所示。将两个相邻的基本空间矢量 U0和 U60所包围的电压Uout映射到和轴6-8上,得到式1,其中 T表示一个 PWM 周期时间长度,T1和T2分别是在一个周期时间T中基本空间矢量U0和U60各自的作用时间,T是零矢量在一个周期中的作用时间,T0+T1+T2=T。
如果定义式2,则可以得到每个扇区中包围这个扇区的两个基本矢量在一个PWM周期中的作用时间T1和 T29-10},如表 1所示。
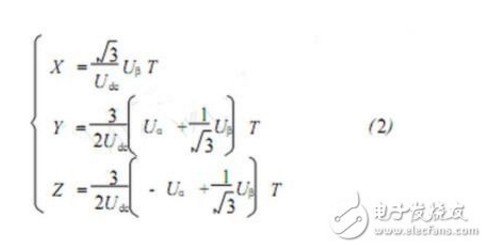
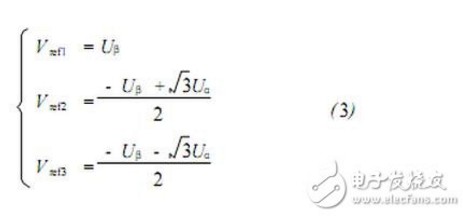
对于式3,定义3个变量a,b,c,如果Vref1》0,则a=1,否则a=0;如果 Vref2》0,则 b=1,否则b=0;如果Vref3》0,则c=1,否则c=0。设N=4c+2b+a,则很容易得到N与扇区数sector的对应关系,如表1。
为了保证三相桥臂在一个PWM周期中导通的占空比,所应设置的比较值分别定义为Tcm1,Tcm2和Tcm3,并定义式4,则N与扇区数sector及Tcm 1,Tcm2和Tcm3的关系如表1所示。将Tcm1,Tcm2和Tcm3与设置为连续增 /减模式的DSP芯片定时器进行比较后得到PWM脉冲 ,控制图1中的3个桥臂的通断,从而在PM SM的3相定子绕组产生相位差为120°的正弦波形电流 ,形成圆形磁场,驱动电机运转。
svpwm与SPWM区别
按照波形面积相等的原则,每一个矩形波的面积与相应位置的正弦波面积相等,因而这个序列的矩形波与期望的正弦波等效。这种调制方法称作正弦波脉宽调制(SPWM),这种序列的矩形波称作SPWM波。
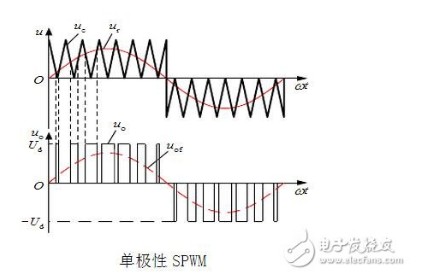
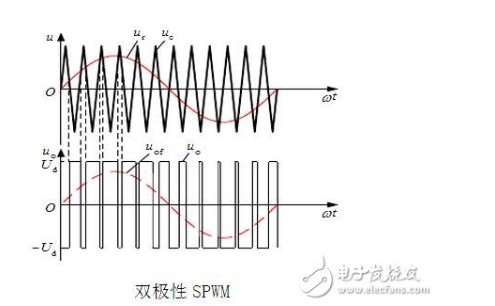
图为三相PWM波形,其中
urU、urV、urW为U,V,W三相的正弦调制波uc为双极性三角载波;
uUN’、uVN’、uWN’为U,V,W三相输出与电源中性点N之间的相电压矩形波形;
uUV为输出线电压矩形波形,其脉冲幅值为+Ud和-Ud;
uUN为三相输出与电机中点N之间的相电压。
经典的SPWM控制主要着眼于使变压变频器的输出电压尽量接近正弦波,并未顾及输出电流的波形。而电流滞环跟踪控制则直接控制输出电流,使之在正弦波附近变化,这就比只要求正弦电压前进了一步。然而交流电动机需要输入三相正弦电流的最终目的是在电动机空间形成圆形旋转磁场,从而产生恒定的电磁转矩。
如果对准这一目标,把逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器的工作,其效果应该更好。这种控制方法称作“磁链跟踪控制”,而磁链的轨迹是交替是由使用不同的电压空间矢量得到的,所以又称“电压空间矢量PWM(SVPWM,Space Vector PWM)控制”。
随着逆变器工作状态的切换,电压空间矢量的幅值不变,而相位每次旋转π/3,直到一个周期结束。这样,在一个周期中6个电压空间矢量共转过2π弧度,形成一个封闭的正六边形。
在一个周期内,6个磁链空间矢量呈放射状,矢量的尾部都在O点,其顶端的运动轨迹也就是6个电压空间矢量所围成的正六边形。
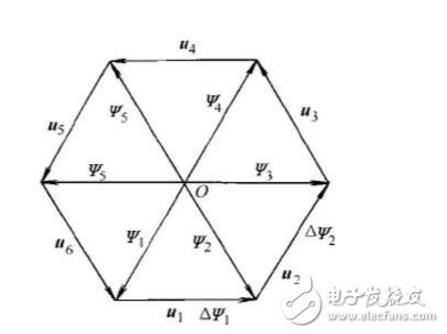
在任何时刻,所产生的磁链增量的方向决定于所施加的电压,其幅值则正比于施加电压的时间。如果交流电动机仅由常规的六拍阶梯波逆变器供电,磁链轨迹便是六边形的旋转磁场,这显然不象在正弦波供电时所产生的圆形旋转磁场那样能使电动机获得匀速运行。如果要逼近圆形,可以增加切换次数,设想磁链增量由图中的11,12,13,14这4段组成。这时,每段施加的电压空间矢量的相位都不一样,可以用基本电压矢量线性组合的方法获得。
传统的SPWM方法从电源的角度出发,以生成一个可调频调压的正弦波电源为目的。SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。SVPWM本身的产生原理与PWM没有任何关系,只是像罢了,SVPWM合成的驱动波形和PWM很类似,因此我们还叫它PWM,又因这种PWM是基于电压空间矢量去合成的,所以就叫它SVPWM了。
综上所述,SVPWM与SPWM的原理和来源有很大不同,但是他们确实殊途同归的。SPWM由三角波与正弦波调制而成,而SVPWM却可以看作由三角波与有一定三次谐波含量的正弦基波调制而成。相比之下SVPWM的主要有以下特点:
(1)在每个小区间虽有多次开关切换,但每次开关切换只涉及一个器件, 所以开关损耗小。
(2)利用电压空间矢量直接生成三相PWM波,计算简单。
(3)逆变器输出线电压基波最大值为直流侧电压,比一般的SPWM逆变器 输出电压高15%
结语
关于svpwm变频调速的相关介绍就到这了,希望本文能对你有所帮助。
相关阅读推荐:SVPWM原理介绍和特点汇总
相关阅读推荐:svpwm算法原理及分析
-
svpwm与spwm的区别和联系2017-12-11 43253
-
基于MATLAB的SVPWM变频调速系统的仿真2016-04-18 762
-
基于DSP的SVPWM变频调速系统实验研究2016-04-15 652
-
基于DSP和SVPWM变频调速系统的研制2016-04-13 680
-
优化SVPWM及其DSP变频调速系统的设计2016-03-30 649
-
SVPWM和SPWM的区别和联系2016-02-16 8683
全部0条评论

快来发表一下你的评论吧 !
