

【干货】必看!APM飞控核心技术解析与实战指南
描述
一、产品概述与定位
APM飞控是开源无人机飞行控制系统的标杆产品,具有开源免费、灵活扩展、生态成熟三大核心优势。该系统不仅成为无人机入门者的首选学习平台,更是专业开发者验证创新算法的重要载体。
二、发展历程与开源意义
APM飞控源于2007年DIYDrones社区发起的ArduPilot开源项目,其演进历程体现了一个成熟开源项目的发展轨迹:
1.x系列:实现基础遥控与稳定飞行功能2.x系列:新增航点飞行、参数自定义调整等核心功能3.x系列:实现跨越式升级,3.2.1版本支持多旋翼、固定翼、VTOL等多种机型
三、分层技术架构解析
硬件平台演进与模块化设计
经典APM2.8硬件采用Atmel ATmega2560 8位微控制器作为主处理器,配备ATmega32U4辅助处理器专责通信任务。传感器套件包括:
MPU6050六轴传感器:集成三轴陀螺仪与三轴加速度计,采样率最高1kHz,数据传输延迟≤1msHMC5883L三轴磁力计:提供航向参考,修正陀螺仪漂移MS-5611气压计:测量精度可达毫米级,为定高飞行提供核心数据GPS模块:标配UBLOX NEO-6M/7M,支持GPS/GLONASS双模定位
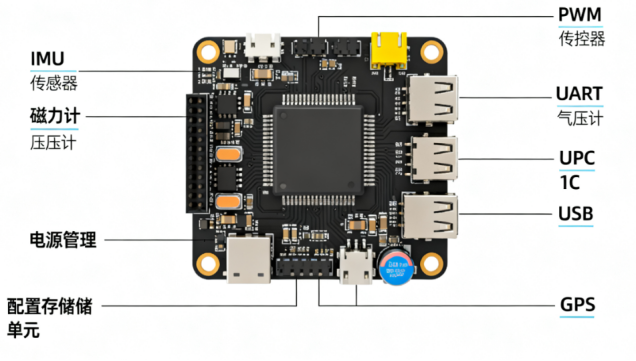
为提升性能,社区推出了基于32位STM32F4处理器的硬件方案,采用“中心辐射式”接口布局,提供8路PWM输出、4路UART串口及I2C/SPI接口。
软件架构与代码组织
ArduPilot固件采用模块化架构,代码托管于GitHub,已超过100万行,遵循GPLv3开源协议。 系统通过硬件抽象层屏蔽底层硬件差异,提供一致的编程接口。 传感器驱动在后台线程运行,主线程定期通过前端方法获取最新数据,确保实时性与效率。
四、核心算法原理深度解析
分层控制策略
APM采用经典的两级PID控制结构:
导航级(高级):处理GPS、气压计等数据,计算期望的俯仰角、滚转角和油门量控制级(低级):结合IMU反馈的实际姿态,解算输出给电机/舵机的控制量
传感器融合技术
通过卡尔曼滤波器或互补滤波器融合多传感器数据:
传感器类型 | 优势 | 局限性 |
|---|---|---|
陀螺仪 | 短期精度高 | 存在漂移 |
加速度计 | 测量重力方向 | 易受振动干扰 |
磁力计 | 提供绝对航向 | 易受电磁干扰 |
全球定位系统 | 提供位置信息 | 更新频率较低 |
姿态控制流程
以多旋翼为例,控制流程每次更新时(Pixhawk上400Hz,APM2.x上100Hz)执行:
调用update_flight_mode()检查并运行相应飞行模式将用户输入转换为倾斜角度、旋转速率等中间指令通过AC_AttitudeControl库进行姿态控制计算调用rate_controller_run()将结果传递到AP_Motors库电机混合代码将滚转、俯仰、偏航值转换为具体PWM输出
五、功能特性与应用场景全面分析
飞行模式体系
APM支持30余种飞行模式,满足不同技能水平和应用需求:
基础模式:自稳(Stabilize)、定高(AltHold)自主模式:自动(Auto)、返航(RTL)、跟随(Follow)高级模式:定点(Loiter)、环绕(Circle)
任务规划能力
支持多达1000个三维航点任务,每个航点可设置高度、速度和执行动作。通过完全可视化的任务规划界面,用户可轻松设计复杂航线,实现"起飞→巡航→执行任务→降落"的全自动流程。
安全机制配置
低电量保护:设置多级阈值,触发警报或自动返航故障检测:通过传感器数据冲突识别异常状态信号丢失处理:遥控器信号中断时自动触发安全策略
六、生态系统与发展趋势
APM飞控已从单纯的飞行控制器发展为完整的无人系统开发平台,支持平台从空中扩展到水下和地面设备。与新兴的PX4系统相比,APM固件因发展历史更长,通常被认为更成熟稳定,适合不求二次开发但求稳定飞行的用户。
-
从DeepSeek到Qwen,AI大模型的移植与交互实战指南-飞凌嵌入式2025-03-28 3221
-
最新视频编码标准H.264及其核心技术2008-06-25 9021
-
蓝牙核心技术概述2014-11-24 10426
-
【原创】Android视频直播核心技术2016-07-26 4327
-
31岁无核心技术,迷茫2018-03-27 3189
-
云计算的五大核心技术2019-06-28 3080
-
五大核心技术如何实现物联网2019-07-25 3128
-
单片机应用的核心技术是什么?2021-11-02 3146
-
APM_V2.8.0自驾仪入门手册(必看)_中文2016-08-24 1762
-
干货分享宁德时代核心技术2019-01-11 8284
-
新手必看:动态住宅 IP 的核心原理与实战指南2025-04-22 1534
-
Kubernetes安全加固的核心技术2025-08-18 1055
-
远心镜头核心技术解析与应用2025-12-08 1113
-
工业级UPS核心技术参数解析与科学选型指南2026-03-18 524
-
TDK 贴片电容核心技术解析:从材料工艺到选型要点2026-04-30 3856
全部0条评论

快来发表一下你的评论吧 !
