

四轴无人机是如何工作的?
描述
四轴飞行器、无人机——无论怎么称呼它们,这些小玩意儿都既迷人又好玩!对于喜欢DIY的人来说,组装一架四轴飞行器绝对是一个很棒的项目。
但四轴飞行器究竟是如何工作的呢?它是如何飞行的?需要组装哪些部件才能打造一架属于自己的四轴飞行器?
一、四轴飞行器如何飞行?
本文将重点介绍四轴飞行器,但本文解释的很多内容也适用于其他配备四个以上螺旋桨的飞行器。因此,如果你正在构建四轴飞行器,本文中的很多内容也同样适用。
在解释四轴飞行器或任何多旋翼飞行器的工作原理之前,我们需要定义一些重要的概念——俯仰、偏航和滚转。这些术语指的是飞行器在飞行过程中可以自由移动的三个维度。
俯仰——俯仰是指飞机机头的上仰或下仰。可以把它想象成爬升或俯冲。
偏航——偏航指的是飞机机头向左或向右转动。可以简单地理解为转弯。
滚转——要理解滚转,想象一下从飞机前部延伸到后部的一条轴线。飞机滚转时,它就是以此为轴转动。也可以将滚转理解为倾斜。
四轴飞行器使用四个电机。其中两个电机顺时针旋转,另外两个电机逆时针旋转。同一轴上的电机旋转方向相同,如图所示。
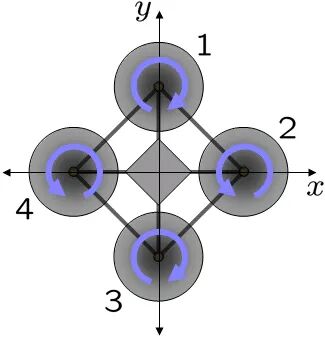
四轴飞行器旋翼旋转方向
高度这个词你可能很熟悉——它描述的是上升或下降。四轴飞行器可以悬停,也可以通过向四个旋翼施加相同的推力来调整高度。
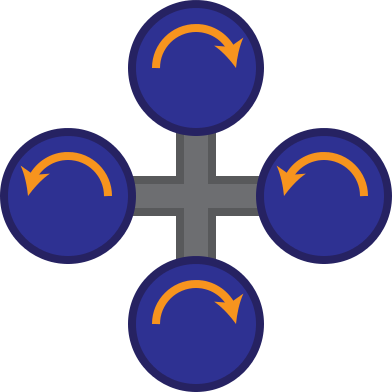
四轴飞行器悬停
为了调整偏航角(Yaw),也就是让飞行器向左或向右转动,四轴飞行器会向一组电机施加更大的推力。例如,四轴飞行器可能会向顺时针旋转的两个电机施加更大的推力来实现转弯。
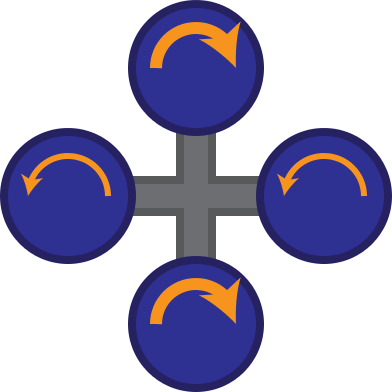
四轴飞行器偏航调整
另一方面,俯仰和滚转的调整是通过在一个转子上施加较大的推力,而在另一个转子上施加较小的推力来实现的。例如,四轴飞行器可以通过向前方顺时针旋转的电机施加较大的推力,而向后方正对的顺时针旋转的电机施加较小的推力来调整俯仰。
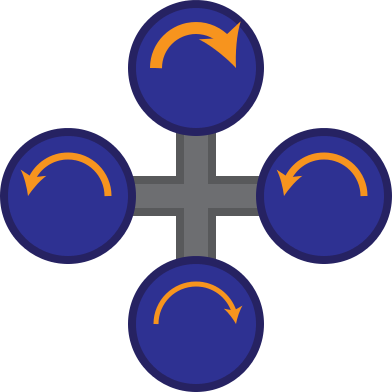
四轴飞行俯仰调节
四轴飞行器易于飞行的一个原因是实际上不必手动调整电机速度,因为这是控制器和电子设备发挥作用的地方。
二、电机
没有电机,四轴飞行器就飞不起来,所以选择合适的电机至关重要。可惜的是,电机的规格有时会让人困惑。
大多数四轴飞行器使用无刷直流电机,尽管较便宜的四轴飞行器和微型直升机中的电机通常带有刷子。
无刷电机由一个带有永磁体的转子和围绕转子的多个电磁铁(也称为极点)组成。无刷电机的极点数从 2 到 14 个不等。极点数越多,电机的控制精度就越高。
无刷电机有三根电线,分别控制电机的三个相位。通过改变这些电线的连接方式,可以控制电机顺时针或逆时针旋转。
四轴飞行器电机的关键规格之一是其千伏 (KV) 额定值。KV 并非千伏,而是指在电机空载状态下施加 1 伏电位差时,电机每分钟的转速 (RPM)。KV 也可以理解为每分钟转数 (RPM)。四轴飞行器典型的 KV 额定值在 500 到 2500 之间。低 KV 电机可以驱动大型螺旋桨,从而产生更大的推力。
一般来说,重量超过 1 公斤的四轴飞行器会使用额定功率在 700 至 900 千伏之间的电机。重量在半公斤至 1 公斤之间的飞行器会使用额定功率在 900 至 1300 千伏之间的电机。重量低于 500 克的飞行器会使用额定功率在 1300 至 2200 千伏之间的电机。
电机的最大额定电流是另一个重要因素。在选择电子调速器 (ESC) 和电池之前,需要知道这个以安培为单位的数值。
电机的额定推力与螺旋桨尺寸相关。这是一个重要的参数,需要了解四轴飞行器的总重量,请记住,该重量包含电机本身的重量。
基本经验法则是,电机和螺旋桨的组合应该能够产生相当于飞行器重量两倍的推力。因此,对于拥有四个电机的四轴飞行器来说,这意味着每个电机应该能够提供相当于整架飞行器重量一半的推力。换句话说,一架1公斤重的四轴飞行器需要四个电机,每个电机至少能够产生半公斤的推力。
另一个重要的电机规格是轴的直径。这很重要,因为它决定了能用哪种螺旋桨与电机匹配。
还需要查看安装螺钉模式和电机支架,以确保电机能够成功安装到四轴飞行器的框架上。
三、螺旋桨
直径和螺距是螺旋桨的两个基本规格。螺旋桨通常以套装形式出售,套装中包含2个顺时针螺旋桨和2个逆时针螺旋桨。
螺旋桨的直径和螺距多种多样,材质可以是塑料、碳纤维,甚至是木材。直径小于 8 英寸的小型螺旋桨通常与高千伏电机配合使用,用于竞赛和特技飞行。直径超过 8 英寸的螺旋桨通常与低千伏电机配合使用,用于提升重型有效载荷,例如摄像机。
螺距通常定义为“每转的行程距离”。螺距越大,旋转速度越慢,这会提高飞行速度,但也会消耗更多功率。实际上,只需更换螺距较小的螺旋桨,即可延长四轴飞行器的飞行时间。螺距较小的螺旋桨可以产生更大的扭矩,从而降低电机的电流消耗。
螺旋桨的直径指的是其尺寸。增加直径可以提高螺旋桨的效率,但也会消耗更多的电机电流。
电机与螺旋桨的匹配也是影响稳定性的一个因素,尤其是在携带相机时。对于大型四轴飞行器来说,如果要携带较大的有效载荷,大螺旋桨和低千伏电机通常效果最佳。
四、电子速度控制器(ESC)
控制无刷直流电机的设备称为电子调速器(ESC)。每个电机都需要一个。
ESC 有三组电线。其中三根粗线连接到无刷电机的三根电线。另外两根粗线连接到配电板,为 ESC 和电机供电。此外,还有三根细线连接到飞行控制器。
ESC 的额定电流必须能够承受电机的最大电流。选择额定电流高于电机最大电流的 ESC 始终是明智之举。
五、飞行控制器

四轴飞行器飞行控制器
飞行控制器是四轴飞行器的大脑。它通过向电调发送信号来控制电机的速度。
高级飞行控制器功能更丰富,并配备陀螺仪、加速度计、声纳、GPS 和磁力计等传感器。简易飞行控制器仅包含陀螺仪,对于大多数初学者来说已经足够。
飞行控制器将接收来自机载无线电接收器的信号,以便远程控制四轴飞行器。然后,它会发挥其神奇的功能,向电子调速器 (ESC) 发送信号来控制电机转速。
飞行控制器实际上是小型计算机,因此可以通过连接到计算机进行编程和更新。尽管飞行控制器很复杂,但实际上并不昂贵。
六、无线电发射器和接收器
四轴飞行器将配备一个机载无线电接收器,可以使用手持无线电发射器控制该设备。接收器和发射器均由其支持的通道数量和工作频率决定。
无线电系统中的每个通道控制四轴飞行器的一个功能或设备。控制四轴飞行器至少需要通道,但大多数人至少会从六个通道开始。额外的通道可用于控制照明或控制云台电机来定位相机。
四个基本通道的使用方式如下:一个通道用于油门,一个通道用于左右转弯,一个通道用于前后俯仰,一个通道用于左右滚转。换句话说,油门、偏航、俯仰和滚转。每个通道也可以用来切换不同的飞行模式。
如果你计划使用多架四轴飞行器,可以购买一个发射器和几个兼容的接收器。显然,这样每次只能飞行一架飞行器。这是一个不错的策略,因为它能让你买得起高质量的发射器,而接收器通常也相当便宜。
发射器-接收器组合以两种不同的模式工作,这些模式本质上决定了发射器上的控制配置。
模式 1 配置将升降舵控制设在左摇杆上,将油门控制设在右摇杆上。模式 2 则将这两个控制反转,这是最常用的配置。如果你是初学者,通常建议将设备设置为模式 2。
七、电池

四轴飞行器电池
没有电池,四轴飞行器就飞不起来。电池的选择是在设计和制造四轴飞行器时最重要的决定之一。
更大的电池容量更大,因此飞行时间也更长。然而,随着电池容量的增加,其重量也会增加,而增加四轴飞行器的重量会缩短飞行时间,因为需要更大的电机电流来提升有效载荷。请记住,较重的四轴飞行器灵活性也会降低。
电池的主要规格是其电流容量,以毫安/小时(mAh)为单位。一块2200 mAh的电池可以提供2.2安培的电流,持续1小时。
电池的另一个规格是电压。电池由多个电芯组成,普通锂聚合物电池的每个电芯能够输出3.7伏电压。因此,电池电压通常指定为3.7伏的倍数——例如,3.7伏、7.4伏、11.1伏和14.8伏是常见的。如果选择更高电压的电池,请确保电调和电机都能支持该电压。
八、框架
最后我们来看看框架,它将四轴飞行器固定在一起。框架可以由多种材料制成,例如木材、塑料或碳纤维。碳纤维的强度与其重量相当,但也可能很脆,这一点必须考虑,因为毫无疑问,你的四轴飞行器最终可能会坠毁。
四轴飞行器的机架尺寸以毫米为单位,指的是四轴飞行器上电机之间的距离。常见的机架尺寸为 180 毫米、250 毫米和 400 毫米。竞速四轴飞行器通常为 250 毫米。
为四轴飞行器选择框架时,请确保它有足够的空间和间隙来安装 ESC 和飞行控制器等物品,以及希望携带的任何其他物品(例如相机)。
一些爱好者也会自己制作框架,通常是用木头。木头其实是个不错的选择,因为它易于加工,而且价格也相当昂贵。它也很容易改装,以便四轴飞行器安装配件。然而,木头容易变形,这会导致四轴飞行器飞行不稳定。
甚至可以使用 3D 打印机制作框架或框架的一部分。
好了,以上就是四轴飞行器的基本组件。把这些组件组装起来,你就可以设计一架属于自己的四轴飞行器了。
翻译:信盈达分享汇
原文地址:https://dronebotworkshop.com/how-does-a-quadcopter-work/
-
电子陀螺仪怎么工作的?怎么使四轴无人机平衡的 ?2023-11-10 1486
-
制作一个四轴无人机的教程2022-07-22 15668
-
目前速度最快的四轴无人机亮相2022-04-07 6059
-
四轴F450无人机供电2022-02-10 1438
-
如何DIY风靡一时的四轴无人机?2021-12-20 2417
-
无人机MCU驱动的相关资料分享2021-11-11 2118
-
如何设计出一个利用PPM控制无人机动作的四轴无人机?2021-09-23 3790
-
小四轴无人机设计四个空心杯电机2021-09-13 1900
-
四轴无人机设计2021-07-19 2094
-
基于STM32的四轴无人机的姿态解算与控制系统设计2019-08-06 2964
-
stm32四轴无人机资料2019-06-09 5101
-
无人机中的MCU是如何工作的?2018-10-09 2732
全部0条评论

快来发表一下你的评论吧 !
