

ARM中的5种异常模式和7种中断源
电子说
描述
ARM中有5种异常模式,有7种中断源。这7种中断源中有些中断是我们希望发生的,但有些中断是我们不希望发生的。
我们希望发生的中断:
软中断:属于svc模式,通过SWI指令便可以产生软中断,进入到svc模式。
irq中断:属于irq模式,当产生普通的外部中断时,处理器便进入到IRQ模式。
fiq中断:属于fiq模式,当产生高优先级外部中断时,处理器便进入到FIQ模式。
我们不希望发生的中断:
复位:属于svc模式,当系统上电时便会产生复位中断,系统进入到svc模式。复位中断不需要中断返回。
取指中止中断:属于abt模式,当预取指发生错误时,便产生取指中止中断,进入到abt模式。
数据中止中断:属于abt模式,当访问数据存储器时,便产生数据中止中断,进入到abt模式。
未定义指令中断:属于und模式,当执行到一条未定义指令时,便产生未定义指令中断,系统进入到und模式。
中断的优先级:
ARM中有6个优先级。各个中断的优先级顺序如下:(1 6 6s 5 2 4 3)
复位: 1
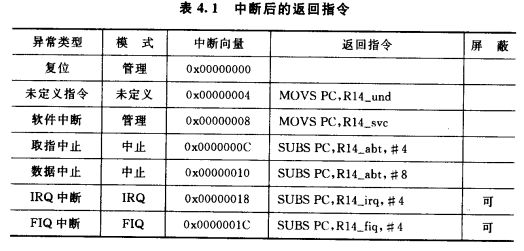
关于各种中断在中断返回时还需要给LR减去一个不同的偏移量的问题我觉得没必要深入研究了,这还要涉及到ARM指令的流水线技术,平时写中断代码都是用C写的,没必要知道这个。用到时再去查表即可。
处理器在进入异常和退出异常时所做的工作:
进入异常时:
1、将要返回处的地址保存在对应异常模式的LR中。(复位不需要保存返回地址)2、将cpsr的内容复制到对应异常模式的spsr中。3、强制修改cpsr的内容,进入到相应异常模式以及根据需要修改某些位。4、强制PC从相应的中断向量地址处进行取址。
注:以上这些步骤都是有cpu自动完成的,也就是当有中断产生时,硬件就会自动完成上述步骤。
退出异常时:
1、将LR中保存的地址赋给PC。2、将spsr的内容恢复给cpsr。3、将irq中断禁止位清零。
注:只需要在异常处理程序中写一句返回指令(如上面的表4.1所示)即可全部实现上述的步骤。
-
ARM异常处理流程2016-10-14 0
-
简述ARM的2种工作状态和7种工作模式2020-08-20 0
-
ARM的2种工作状态和7种工作模式。[附带文档下载]2020-08-20 0
-
ARM体系的七种工作模式分别是哪些2021-12-15 0
-
教你一种ARM处理异常中断的方法2022-08-18 0
-
在SWI软中断指令中LR中放的是异常模式下的返回地址求解2023-02-27 0
-
ARM处理器7种工作模式2023-12-15 0
-
ARM体系中的异常中断及其应用2017-09-22 498
-
arm处理器异常模式有哪些2017-11-02 19014
-
浅谈ARM体系CPU的7种工作模式2017-11-08 2603
-
ARM处理器的异常模式2020-07-21 2792
-
arm处理器的异常模式包括哪些2023-09-05 2813
-
arm处理器有哪些中断源?arm处理器对异常中断的响应过程2023-10-19 1481
-
arm中断是怎么实现的2024-01-05 927
全部0条评论

快来发表一下你的评论吧 !
