

伺服电机控制系统的电流环带宽提高设计
描述
电流环带宽提高设计
上篇讨论了电流环路组成的各个部分,以及电流环PI参数整定的具体方法。根据上期介绍,最终的参数整定公式仅仅与电机电感电阻参数,以及PWM载波周期有关: 。其中
。其中 当Tpwm确定后,那么最终的电流环带宽也就随之确定。例如,系统的PWM周期为16kHz,那么系统的自然频率即为8k,对应的电流环带宽为1274Hz。
当Tpwm确定后,那么最终的电流环带宽也就随之确定。例如,系统的PWM周期为16kHz,那么系统的自然频率即为8k,对应的电流环带宽为1274Hz。

在传统的PI电流控制器中,一旦PWM周期确定了,那么系统带宽也就随之确定了。由于电机本身的阻感电气特性是系统中惯性最大的部分,PI控制器需要对这部分进行零极点对消,在此基础上如果要进一步提高电流环带宽,只能对Figure1中的剩余两个惯性环节进行改善。
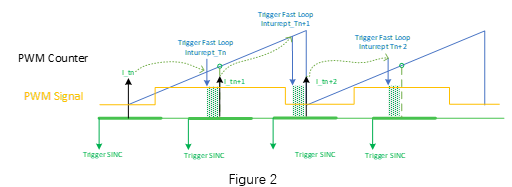
Figure 2是PWM输出信号和相电流采样点时序图,绿色箭头为触发sinc filter采样的时刻,为了确保在输出电压矢量的零矢量中心时刻采样到有效的电流反馈信号,需要保证整个转换时间的中间时刻与零矢量中间时刻对齐。
绿色线段部分为sinc filter的转换时间,该转换时间由sinc filter的抽样率和阶数直接相关。蓝色箭头为触发电流环中断响应函数时刻。PWM会在整个周期的起始时刻和中间时刻进行占空比更新。
可以从以下两个方面入手缩短数字控制延迟:
直接缩短PWM载波周期;
确保需要更新的PWM占空比在最近的重载点前计算完,这可以通过设计合适的进入中断的时间点来实现。图中可以看到电流环计算完成始终在电流采样完成后的第一个PWM寄存器重载时刻前。
PWM波导致的延迟,是仅与PWM载波周期相关的,等效延迟时间为半个载波周期,因此,要缩短这一部分产生的延迟,也只能通过提高PWM载波周期来完成。
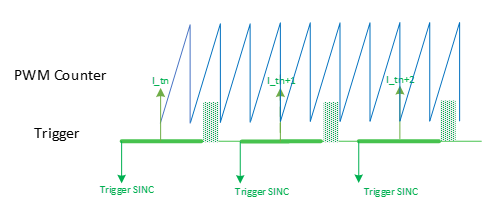
下图为最终的PWM波与电流采样图,可以看到,最终的PWM周期取决于sinc filter的转换时间和电流环的执行时间,尽管最终的传递函数和图1保持一致,但是整个系统的电流响应带宽因为Tpwm的减小得到进一步提高。
本期关于如何提高伺服电控系统的电机电流环响应带宽的介绍就先到这里,下期会对整个方案的相关资源的使用情况进行介绍。下期见!
-
伺服电机控制系统的高宽带电流环参数设计2025-11-17 8131
-
电动车电机驱动系统的电流控制2016-01-14 3708
-
纯电动汽车的电机驱动电流控制2016-01-18 7193
-
电流环带宽是什么意思2021-09-29 2757
-
怎样去计算电流环的闭环带宽2021-10-09 7919
-
基于DSP和功率模块的电机伺服控制系统2009-07-08 597
-
基于LabVIEW的直流伺服电机模糊PID控制系统2016-04-05 1507
-
基于DSP的永磁同步电机交流伺服控制系统2016-04-18 900
-
基于单片机的交流伺服电机控制系统2016-04-26 720
-
基于矢量控制的永磁同步交流伺服电机控制系统2017-01-21 1233
-
基于矢量控制的永磁同步交流伺服电机控制系统程序2021-09-23 1516
-
交流伺服电机控制系统是什么?2023-03-16 1873
-
伺服控制系统的主回路的构成2024-06-14 2118
-
步进电机伺服控制系统的作用2024-09-04 2452
-
电机控制器与伺服系统的关系2025-01-22 2054
全部0条评论

快来发表一下你的评论吧 !
