

剖析风扇速度控制器原理
描述
1 概述
IC设计者力求在越来越小的封装里放入更多高速运行的晶体管,但这必将导致发热。为了把这些高功率IC放进更小的封装内,就必须有效解决热管理问题。在很多应用中使用风扇来降温,但风扇会带来机械故障,增加功耗和噪声。因此,应当对风扇速度进行监测和控制以解决这些问题,从而使风扇工作更可靠,功耗和噪声更低。 由于直流无刷风扇易用、可靠,因此是大部分电子产品的首选方案。它是一个两端器件,加上直流电压即可工作。其直流电压电压有5V,12V,24V和48V,目前选和的12V风扇较多。随着12V电源的减少,5V风扇的用量将会增加。电信领域一般使用48V风扇。直流无刷风扇的换向整流是在风扇内部通过电子方式控制的,老式直流风扇使用机械工刷子,因而会产生较高的EMI,并易于损坏。而无刷风扇用电子传感器和开关来替代机械式刷子,从而延长了使用寿命,是一种简单易用、工作可靠的两端器件。直流无刷风扇的端电压不同,其转速和消耗的电流也不同(成正比)。 尽管直流无刷风扇有很高的可靠性,但它仍然是机械器件。在长时间使用时,其风扇速度和冷却效率可能会下降甚至失效,所以要对风扇进行连续监测。很多风扇制造商提供有不同的监控方式,一般分为:报警传感器和速度传感器两类。利用报警传感器可在风扇速度低于某个门限值时给出报警信号。而某些制造商则用速度传感器给出与频率成正比的风扇速率的输出信号,一般每转娄产生2个脉冲。报警传感器和速度传感器都可以提供漏极开路或内部上拉输出,内部上拉可以是TTL电平或电源电压。值得注意的是:用风扇速度控制电源电压的改变将会影响传感器和其它电路。而且实际设计中必须考虑风扇的使用条件,(如最恶劣的温度范围、最大功耗、风扇的误差和使用寿命等),工作在适当的条件下可以降低风扇速度,而在最恶劣的条件下,则应加快风扇速度。合理控制风扇速度能够降低系统的噪声和功耗,从而延长风扇的寿命并减少灰尘。
图一风扇速度控制器
2 风扇速度控制方法
2.1 脉宽调制法(PWM)
脉冲宽度调制法(PWM)是将风扇电源的开关频率设为固定值,通过改变其占空比来调节风扇速度的方法。占空比越大,风扇速度越快。这种控制方式的关键在于选择合适的开关频率,如果频率太低,风扇速度将会随PWM周期而振荡。相反,如果频率过高,风扇内部的换向整流电路会断开风扇加速/减速电路的电源而导致风扇停转。一般的频率范围是20Hz~160Hz。另外,PWM的上升和下降时间要足够慢,以保证风扇的长期稳定。PWM控制方式的优点是驱动电路简单、有很好的启动特性、晶体管热量耗散小等。缺点是增加了风扇的应力,不便使用速度报警传感器,而速度报警传感器与电机使用同一电源供电,如电机电源以20Hz~160Hz频率接通或断开,则传感器也会随之关断或开启,从而失去应有的检测功能。 在PWM控制方法中,风扇的电压为额定值(例如12V风扇中的12V电源)或零电压,但由于风扇没有满负荷运转,因而它的反向电动势就会减少,这将导致PWM导通期间的电流可能会大于正常值。虽然风扇的设计使共能够处理较大的电池,但在风扇启动阶段,电流将每秒增加30倍,这将对风扇的可靠性产生很大影响。尽管如此,PWM仍然是低成本应用的理想选择。
2.2 线性调节方法
这种方法利用线性稳压器来调节风扇的直流电压,它要求风扇能够工作在较宽的电压范围内与PWM控制方式相比,其优点是能够使用速度和报警传感器;缺点是功耗较大,需要解决启动和停止问题。在用线性稳压器控制风扇两端的直流电压时,虽然其功率消耗将产生热量,但在最大致冷和最小致冷状态下的功率消耗却近似为零。因为在最大致冷时,调整管上的电压差近似为零;最小致冷时调整管上的电流近似为零,所以功耗近似为零。在风扇两端的电压为最大工作电压的一半时,其功耗最大,这时的功率耗散可由下式估算: P=1/4(Vmax×Imax) 式中,V和I分别是风扇的额定电压和额定电流,如1.2W的风扇的调整管的功率耗散只有300mW(12V的风扇工作在6V)。所以风扇速度降低时能够节省一定的功率。启动和停止是相关联的,风扇在启动前需要一定的启动电压。风扇运转后,一旦风扇电压降低到停止电压,风扇就会停止运转。启动电压一般等于或稍大于停止电压,通常是风扇额定电压的25%~50%,在没有速度监控时,判断风扇是运转还是停止有两种方法:第一是保证风扇两端的电压始终大于启动电压,一般可设置该电压大于额定电压的60%,以降低风扇电压的控制范围。第二是使用带有转速计的风扇,并由微控制器对转速计进行监控。在风扇没有启动或停止前,利用软件可以了解其状态,但是这种方法将增大设计的复杂程度和软硬件资源。
2.3 DC-DC控制器
同线性稳压方式一样,DC-DC开关方式也是通过控制风扇两端的直流电压来控制风扇速度,所不同的是这种方式采用的开关方式。这两种方式的优缺点基本相同,有一点不同的是DC-DC开关方式的理想效率是100%,所以不会产生热量。实际上DC-DC开关控制器的效率通常是75%~95%,,效率升高,成本和复杂程度就会增加。只有在风扇工作电压降低低时才会节省功率,当工作电压是饱和电压的一半时,功耗降低的幅度最大。节省功率的代价是成本和复杂程度的提高,所以DC-DC方式一般用于例携系统以及需要大功率风扇或多个风扇控制的应用中。
2.4 高端/低端驱动
以上三种方式可以是低端驱动也可以是高端驱动。高端驱动的电路稍复杂一点,好处是风扇负端可以接地,速度和报警传感器具有相同的参考地,而且易于接口。低端驱动不需要电平转换,但速度和报警传感器需要电平转换电路。这时风扇的正端一般保持在恒定电压,而负端电压是可以控制和调节的,因此速度和报警传感器的参考点易改变,因而需要电平转换电路。
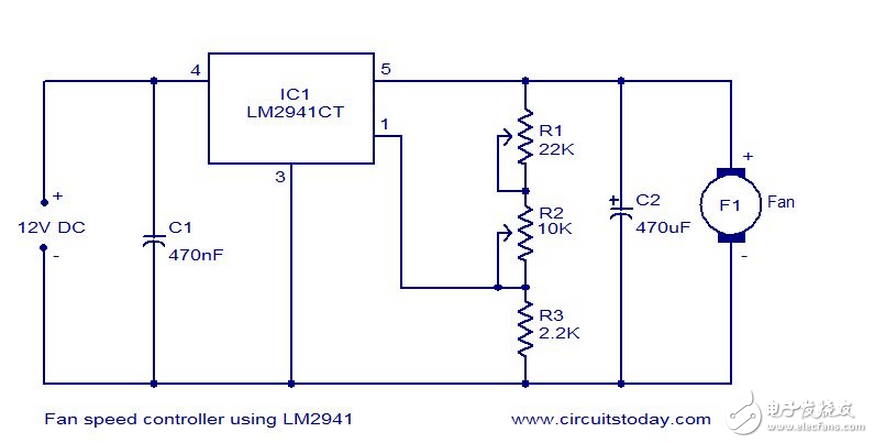
图二电路图
3 无转速计的风扇速度控制
两个不带报警传感器和速度传感器的风扇速度控制电路,的MAX1669构成PWM控制方式,是MAX1669构成线性调节控制方式。MAX1669既是温度传感器又是风扇控制器,两部分可独立工作并与微控制器相配合,其接口方式为SMBus。温度传感器通过安装在远端的二极管来完成,这个二极管也可以包含在某些器件内部,例如XILINX公司的VIRTEX系列器件,这样会更确切地控制关键器件的温度并省去外部二极管。 当MAX1669检测的温度增加时,可由软件来控制并提高风扇速度。风扇速度的控制与温度测量无关,所以这是开环控制系统,不存在稳定性问题。但无地直接知道被控制件的实际温度,也无法直接了解风扇是否失灵或制冷效率是否下降。如果温度传感器放在要制冷的地方,可设计成一个闭环系统,风扇速度增加,温度下降。闭环系统需要注意稳定性的问题,同时会增加软件的复杂性。
4 带有转速计的风扇速度控制
是带有转速计的风扇速度控制电路。MAX6625用于测量温度并通过类似I2C的两线接口传送至微控制器。两线接口将命令传送给MAX6650,由MAX6650来控制风扇的速度,MAX6650内部的接口电路可以连接风扇的转速计(速度传感器),风扇速度通过SMB两线接口读取。用MAX6650即可构成风扇速度控制器或风扇速度调节器。可用风扇速度控制器来控制风扇的两端电压,从而达到控制风扇速度的目的。风扇速度调节器实际上是用转速计来对风扇速度进行测量和调节。把MAX6650用于风扇速度控制器时,用微控制器从MAX6625读取温度,并从MAX6650读取速度,然后通过MAX6650里的DAC来控制风扇两端的电压和速度。微控制器必须不断地读取风扇速度和通过DAC来调节风扇速度,这在启动和停止阶段尤为重要。在用MAX6650进行速度调节时,可利用微控制器给邮速度指令,并用MAX6650自动监控和调节风扇速度。一旦速度指令传送给MAX6650,微控制器就可以不再介入,这样可减少软件的工作量,如果MAX6650不能提供指令所要求的控制电压,系统将产生报警信号给微控制器以产生中断。
-
深入剖析ADT7460:dBCOOL™ 远程热控制器与风扇控制器2026-04-10 170
-
TC647 PWM风扇速度控制器:特性、应用与设计要点2026-04-09 332
-
深入剖析MAX6643/MAX6644/MAX6645自动PWM风扇速度控制器2026-04-03 365
-
深入剖析MAX31760:高精度风扇速度控制器2026-03-02 256
-
MAX6620:四通道线性风扇速度控制器的深度解析2026-02-28 735
-
风扇速度控制器电路图分享2024-02-12 11480
-
无叶风扇控制器怎么调 无叶风扇控制器怎么接线2024-01-24 4908
-
风扇速度控制很酷2023-05-17 3087
-
SOT-23 SMBus风扇速度控制器延长电池寿命并降低噪音2023-05-08 1997
-
用Arduino和红外遥控器制作直流风扇速度控制器2023-02-02 733
-
用于使用RF的风扇速度控制器的无线交流电源调光器2023-01-03 931
-
采用SOT-23封装的SMBU风扇速度控制器2020-08-27 2355
-
采用FanSense TM技术的PWM风扇速度控制器2010-11-20 1134
-
TC642中文资料,pdf (开关模式风扇速度控制器)2010-02-23 1094
全部0条评论

快来发表一下你的评论吧 !
