

 Rockchip CIF驱动深度解析:从架构设计到电源计数补丁修复
Rockchip CIF驱动深度解析:从架构设计到电源计数补丁修复
电子说
描述
在嵌入式 Linux 系统中,Rockchip CIF(Camera Interface)驱动是摄像头硬件与上层应用的“桥梁”—— 它不仅要实现设备初始化、格式协商、数据捕获等核心功能,还需保障运行稳定性。本文将从「驱动整体架构」入手,拆解核心文件功能与调用关系,再聚焦「Sensor 电源引用计数补丁」,详解如何通过补丁解决实际运行中的稳定性问题,为驱动开发与调试提供完整参考。
一、CIF 驱动整体架构:核心文件与功能拆解
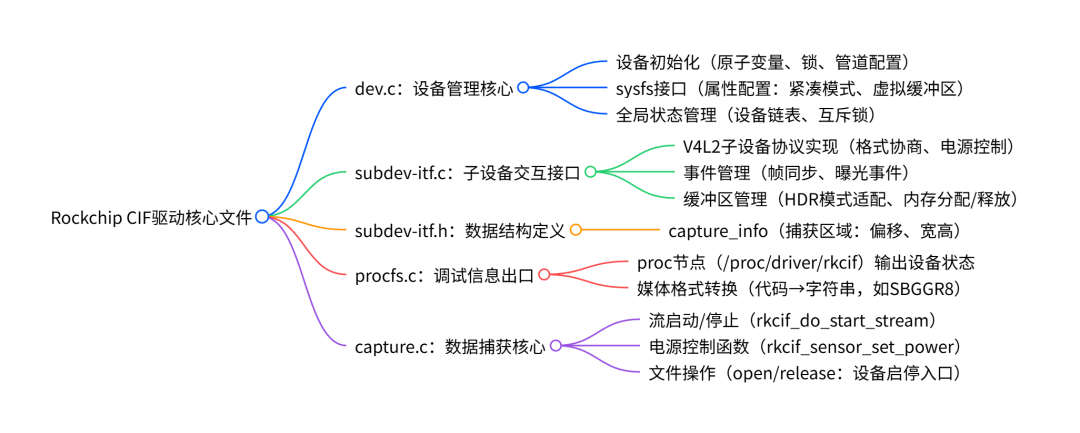
Rockchip CIF 驱动位于drivers/media/platform/rockchip/cif/目录下,包含 5 个核心文件(dev.c/subdev-itf.c/subdev-itf.h/procfs.c/capture.c),各文件分工明确、协同工作,共同支撑摄像头的完整功能。
1. 核心文件功能总览
先通过一张脑图快速梳理各文件的核心定位:
2. 关键文件深度解析
(1)dev.c:设备管理“总控”
作为驱动的“大脑”,dev.c负责初始化设备基础环境、管理全局状态,并提供用户可配置的属性接口。
•核心工作:
a.设备初始化:在rkcif_plat_init中初始化原子变量(如power_cnt、streamoff_cnt)、互斥锁(stream_lock)、媒体管道(pipe),为设备运行打下基础。
b.sysfs 属性配置:实现compact_test(紧凑数据流模式)、is_use_dummybuf(虚拟缓冲区开关)等属性的读写函数,用户可通过/sys/class/video4linux/videoX/路径动态调整设备行为。
c.全局状态维护:通过rkcif_device_list链表管理所有 CIF 设备,rkcif_dev_mutex保证多设备操作的互斥性,避免并发冲突。
•关键代码示例(设备初始化):
// drivers/media/platform/rockchip/cif/dev.cint rkcif_plat_init(struct rkcif_device *cif_dev, struct device_node *node, int irq) {// 初始化原子变量(电源、流关闭、传感器状态)atomic_set(&cif_dev->power_cnt, 0);atomic_set(&cif_dev->streamoff_cnt, 0);atomic_set(&cif_dev->sensor_off, 1);// 后续补丁新增:Sensor电源引用计数初始化atomic_set(&cif_dev->sd_power_cnt, 0);// 初始化媒体管道(open/close回调)cif_dev->pipe.open = rkcif_pipeline_open;cif_dev->pipe.close = rkcif_pipeline_close;return 0;}
(2)subdev-itf.c:传感器“交互桥梁”
subdev-itf.c是 CIF 驱动与摄像头 Sensor 的直接交互接口,实现 V4L2 子设备协议,负责格式协商、电源控制、事件触发。
•核心工作:
a.格式协商:通过sditf_get_set_fmt与 Sensor 协商输入格式(分辨率、像素格式如 SBGGR8),并配置 CIF 内部数据流参数。
b.电源控制:sditf_s_power函数触发 Sensor 电源开关,是后续补丁重点修复的调用路径之一。
c.事件管理:订阅 / 触发V4L2_EVENT_FRAME_SYNC(帧同步)、V4L2_EVENT_EXPOSURE(曝光)事件,确保数据捕获时序正确。
•关键代码示例(电源控制接口):
// drivers/media/platform/rockchip/cif/subdev-itf.cstatic int sditf_s_power(struct v4l2_subdev *sd, int on) {struct sditf_priv *priv = v4l2_subdev_to_sditf(sd);struct rkcif_device *cif_dev = priv->cif_dev;int ret = 0;mutex_lock(&cif_dev->stream_lock);if (on) {pm_runtime_get_sync(cif_dev->dev);// 后续补丁新增:调用统一电源管理函数ret |= rkcif_sensor_set_power(&cif_dev->stream[0], on);} else {pm_runtime_put_sync(cif_dev->dev);ret |= rkcif_sensor_set_power(&cif_dev->stream[0], on);}mutex_unlock(&cif_dev->stream_lock);return ret;}
(3)capture.c:数据捕获“执行核心”
capture.c负责摄像头数据的实际捕获,包括流启动 / 停止、缓冲区处理、电源控制函数实现,是本次补丁修改的核心文件。
•核心工作:
a.流管理:rkcif_do_start_stream启动数据捕获,rkcif_stream_init初始化流状态(如帧丢失计数frame_loss)。
b.电源控制函数:rkcif_sensor_set_power是 Sensor 电源开关的实际实现,补丁通过修改该函数引入引用计数逻辑。
c.文件操作:rkcif_fh_open/rkcif_fh_release处理用户空间的设备打开 / 关闭请求,控制电源开关的调用时机。
(4)procfs.c:调试信息“出口”
procfs.c通过/proc/driver/rkcif节点向用户空间暴露驱动运行状态,便于调试定位问题。
•核心工作:
a.格式转换:rkcif_pixelcode_to_string将媒体总线格式代码(如MEDIA_BUS_FMT_SBGGR8_1X8)转换为可读字符串("SBGGR8")。
b.信息输出:rkcif_show_clks输出时钟频率、rkcif_show_format输出当前捕获格式,帮助开发者确认设备配置是否正确。
(5)subdev-itf.h:数据结构“定义层”
仅定义struct capture_info结构体,存储摄像头捕获区域的偏移(offset_x/y)和分辨率(width/height),是格式协商、缓冲区分配的基础数据载体。
二、驱动模块协同:调用关系与架构流程图
各文件并非独立运行,而是通过“初始化→配置→捕获→调试” 的流程协同工作,以下是核心调用关系与架构图:
1. 核心调用流程(以 “设备启动” 为例)
1.初始化:dev.c的rkcif_plat_init初始化设备状态→subdev-itf.c的sditf_init_buf分配缓冲区→capture.c的rkcif_stream_init初始化流。
2.用户交互:用户通过open调用触发capture.c的rkcif_fh_open→加锁后调用rkcif_sensor_set_power上电→subdev-itf.c的sditf_s_power与 Sensor 交互。
3.数据捕获:rkcif_do_start_stream启动流→subdev-itf.c的事件机制同步帧数据→数据写入缓冲区。
4.调试监控:用户读取/proc/driver/rkcif→procfs.c的函数从dev.c获取设备状态并输出。
2. 架构流程图

三、补丁修复:Sensor 电源引用计数问题拆解
在理解驱动架构后,我们聚焦本次关键补丁—— 修复 Sensor 电源引用计数问题。该补丁针对 Kernel 6.1 版本,解决了驱动运行中 “过早断电”“重复上电” 等稳定性隐患。
1. 补丁背景:原驱动的 3 大问题
原 CIF 驱动对 Sensor 电源的管理缺乏 “引用计数” 机制,导致多场景下异常:
•问题 1:无计数跟踪:多个模块(如预览 + 录像)同时使用 Sensor 时,无法记录 “当前使用者数量”,一个模块调用断电后,其他模块会因 Sensor 断电崩溃。
•问题 2:调用时机混乱:rkcif_sensor_set_power在open/release中调用时机错误(如解锁后调用),并发场景下计数错乱。
•问题 3:路径覆盖不全:subdev-itf.c的sditf_s_power未经过统一电源函数,绕过计数逻辑,导致部分场景电源失控。
2. 修复思路:引入 “原子引用计数”
补丁核心是通过原子变量sd_power_cnt (定义在dev.c,声明在dev.h)跟踪电源使用状态,规则如下:
•上电(on=1):仅当sd_power_cnt从 0→1 时,才执行 Sensor 上电(避免重复上电)。
•断电(on=0):仅当sd_power_cnt从 1→0 时,才执行 Sensor 断电(避免过早断电)。
•全路径覆盖:所有电源操作(open/release、sditf_s_power)均调用rkcif_sensor_set_power,确保计数不遗漏。
3. 补丁对各文件的修改(附路径)
(1)capture.c:核心逻辑修改(路径:
drivers/media/platform/rockchip/cif/capture.c)
•修改 1:rkcif_sensor_set_power函数重构
从静态函数改为全局函数,新增计数逻辑:
// 原函数:直接操作电源,无计数static int rkcif_sensor_set_power(...) { ... }// 补丁后:新增计数控制int rkcif_sensor_set_power(struct rkcif_stream *stream, int on) {struct rkcif_device *cif_dev = stream->cifdev;// 断电:计数>0时减1,未到0则不执行断电if (!on && atomic_dec_if_positive(&cif_dev->sd_power_cnt))return 0;// 上电:计数+1后>1,说明已有模块使用,不重复上电if (on && atomic_inc_return(&cif_dev->sd_power_cnt) > 1)return 0;// 仅满足“首次上电”或“最后一次断电”,才操作Sensor电源if (cif_dev->terminal_sensor.sd)v4l2_subdev_call(..., core, s_power, on);return 0;}
•修改 2:调整open/release中函数调用时机
将rkcif_sensor_set_power从“解锁后” 移到 “锁内”,确保并发安全:
// open函数:锁内调用,避免并发计数错乱static int rkcif_fh_open(...) {mutex_lock(&cifdev->stream_lock);ret = rkcif_sensor_set_power(stream, on); // 补丁后:锁内调用mutex_unlock(&cifdev->stream_lock);}// release函数:先断电计数,再释放资源static int rkcif_fh_release(...) {mutex_lock(&cifdev->stream_lock);ret = rkcif_sensor_set_power(stream, on); // 补丁后:锁内调用v4l2_pipeline_pm_put(...); // 后释放资源mutex_unlock(&cifdev->stream_lock);}
(2)dev.c:初始化计数变量(路径:
drivers/media/platform/rockchip/cif/dev.c)
在rkcif_plat_init中新增sd_power_cnt初始化,确保计数从 0 开始:
atomic_set(&cif_dev->power_cnt, 0);atomic_set(&cif_dev->streamoff_cnt, 0);atomic_set(&cif_dev->sensor_off, 1);atomic_set(&cif_dev->sd_power_cnt, 0); // 补丁新增:初始化Sensor电源计数
(3)dev.h:声明变量与函数(路径:
drivers/media/platform/rockchip/cif/dev.h)
•新增sd_power_cnt到struct rkcif_device:
struct rkcif_device {atomic_t power_cnt;atomic_t streamoff_cnt;atomic_t sensor_off;atomic_t sd_power_cnt; // 补丁新增:Sensor电源引用计数// ... 其他成员};
•声明rkcif_sensor_set_power函数(因函数从 static 改为全局):
int rkcif_sensor_set_power(struct rkcif_stream *stream, int on); // 补丁新增
(4)subdev-itf.c:补全调用路径(路径:drivers/media/platform/rockchip/cif/subdev-itf.c)
在sditf_s_power中调用rkcif_sensor_set_power,确保该路径纳入计数管理:
static int sditf_s_power(...) {// ... 原有逻辑if (on) {pm_runtime_get_sync(cif_dev->dev);ret |= rkcif_sensor_set_power(&cif_dev->stream[0], on); // 补丁新增} else {pm_runtime_put_sync(cif_dev->dev);ret |= rkcif_sensor_set_power(&cif_dev->stream[0], on); // 补丁新增}// ... 原有逻辑}
4. 修复价值:从 “隐患” 到 “稳定”
•解决功能异常:多模块共用 Sensor 时,避免 “一个模块退出导致整体崩溃”(如预览退出后录像仍正常)。
•保护硬件寿命:避免重复上电导致 Sensor 电源模块过热,延长硬件寿命。
•符合 V4L2 规范:遵循“按需开关电源” 的框架要求,提升驱动兼容性。
四、总结:驱动架构与补丁的启示
Rockchip CIF 驱动通过 “模块化设计” 实现了功能解耦 ——dev.c管全局、subdev-itf.c管交互、capture.c管执行、procfs.c管调试,这种架构既便于维护,又能灵活扩展(如新增 HDR 模式)。
而本次补丁则体现了内核驱动开发的核心原则:
1.资源管理需“计数”:多模块共享的资源(如 Sensor 电源),必须通过引用计数跟踪使用状态。
2.并发操作需“锁保护”:关键逻辑(如计数修改)必须在互斥锁内执行,避免并发错乱。
3.调用路径需“全覆盖”:确保所有触发点都经过统一逻辑,不遗漏任何场景。
对于嵌入式开发者而言,理解驱动架构是定位问题的基础,而补丁的修复思路则为“资源管理类问题” 提供了通用参考 —— 小到电源计数,大到内存管理,核心都是 “清晰跟踪状态、规范操作流程”。
若你的设备基于 Rockchip 芯片且使用 Kernel 6.1,建议及时合入该补丁,为摄像头稳定运行保驾护航~
-
RKISP内核驱动深度解析|Rockchip ISP39图像信号处理流水线2026-07-11 423
-
Windows平台EtherCAT实时控制:从抖动抑制到虚拟化架构解析2026-01-29 670
-
电机驱动EMC整改:从传导到辐射,问题诊断与修复2025-10-30 1059
-
GPU架构深度解析2025-05-30 2198
-
架构与微架构设计2023-05-08 2458
-
rockchip-isp1驱动程序和rockchip SoC上图像信号处理模块的基本信息介绍2022-04-15 7003
-
AUTOSAR架构深度解析 精选资料分享2021-07-28 2040
-
功能安全---AUTOSAR架构深度解析 精选资料分享2021-07-23 1467
-
深度:嵌入式系统的软件架构设计!资料下载2021-04-25 1236
-
苹果重新发布补丁用于修复iOS越狱的漏洞2019-08-27 2865
-
瑞芯微系列芯片的CIF和ISP的新驱动结构及开发指南资料免费下载2019-04-24 4196
-
介绍WEBENCH 电源架构设计工具使用方法与技巧2018-08-06 4505
-
【原创】Dex分包架构设计—实现安卓热修复2016-07-26 3460
-
【WEBENCH 大赛作品】WEBENCH FPGA 电源架构设计2015-07-16 1924
全部0条评论

快来发表一下你的评论吧 !
