

 RK3588摄像头配置:搞懂CPhy与DPhy的区别,再也不踩坑!
RK3588摄像头配置:搞懂CPhy与DPhy的区别,再也不踩坑!
电子说
描述
在嵌入式视觉开发中,MIPI Phy(物理层) 是摄像头与处理器之间的“数据高速公路”—— 它直接决定了摄像头的分辨率、帧率上限,以及硬件连接的稳定性。作为 Rockchip 旗舰级平台的 RK3588,同时支持 CPhy 和 DPhy 两种主流 MIPI Phy 标准,适配从入门到高端的各类摄像头需求。
很多开发者在配置 RK3588 摄像头时,常会困惑:CPhy 和 DPhy 到底有啥不一样?该选哪种?两者的设备树配置又有哪些关键差异?今天我们就从原理、场景、实战配置三个维度,一次性讲透这个问题。
一、先搞懂基础:CPhy 与 DPhy 的核心原理差异
CPhy(MIPI C-PHY)和 DPhy(MIPI D-PHY)都是 MIPI 联盟定义的物理层协议,核心目标是实现高速图像数据传输,但在信号编码、带宽效率、硬件设计上有本质区别,这些差异直接决定了它们的适用场景。
我们用一张表清晰对比核心差异:
|
对比维度
|
DPhy(差分物理层)
|
CPhy(紧凑型物理层)
|
|
信号传输方式
|
采用“差分对” 传输(每 lane 是 2 根线:正 / 负),通过 “0/1” 电平变化传递信号,兼容传统逻辑。
|
采用“三相符号编码”(每组 3 根线),通过 3 种电平状态的切换传递信号,是更高效的编码方式。
|
|
带宽效率
|
单 lane 带宽上限:D-PHY 1.3 版本达 5Gbps/lane,需通过 “多 lane 叠加” 提升总带宽(如 4 lane 达 20Gbps)。
|
单 lane 带宽上限:C-PHY 1.2 版本达 6.4Gbps/lane,且带宽密度更高(3 根线实现比 DPhy 2 根线更高的带宽)。
|
|
引脚数量
|
每 lane 需 2 根线(差分对),加上时钟 lane(另 1 对),总引脚数较多(如 4 lane 需 10 根线:4*2+2)。
|
每“组” 仅需 3 根线(无单独时钟 lane,时钟嵌入数据中),相同带宽下引脚数更少(如同等 20Gbps 带宽,CPhy 仅需 6 根线:2 组 * 3)。
|
|
功耗与 EMI
|
差分信号抗干扰性强,但高带宽下功耗较高;单独时钟 lane 易产生电磁干扰(EMI)。
|
三相编码无单独时钟,EMI 更低;相同带宽下,因引脚少、编码效率高,功耗比 DPhy 低 10%-20%。
|
|
兼容性
|
协议成熟(2008 年发布),支持从低带宽(100Mbps)到高带宽(20Gbps),适配绝大多数摄像头芯片。
|
2016 年发布,主打高带宽场景,兼容性相对局限(仅中高端传感器支持),但技术迭代更快。
|
简单理解:DPhy 像 “传统双向车道”,靠增加车道数(lane)提升运力,稳定但占用空间;CPhy 像 “智能三车道”,靠更高效的通行规则(三相编码)提升运力,省空间、低功耗,适合 “高速重载” 场景。
二、场景决定选择:CPhy 与 DPhy 的典型应用
选择 CPhy 还是 DPhy,核心看摄像头的分辨率、帧率需求,以及硬件设计的约束(如 PCB 空间、功耗)。
1. DPhy:成熟稳定,覆盖中低高端主流场景
DPhy 因协议成熟、兼容性广,是目前嵌入式视觉的 “主力军”,尤其适合以下场景:
•中低像素摄像头:如 200 万~800 万像素的安防摄像头、车载环视摄像头(分辨率 1080P~4K,帧率 30fps),单 lane 或 2 lane 即可满足带宽需求;
•中端高像素摄像头:如 1200 万~4800 万像素的手机副摄、工业检测摄像头(4K@30fps),4 lane DPhy(20Gbps 带宽)完全够用;
•对兼容性要求高的场景:如需要适配不同品牌、不同型号传感器的方案,DPhy 的广泛支持能减少适配成本。
2. CPhy:高带宽刚需,聚焦高端影像
CPhy 的优势在 “高带宽、低功耗、省引脚”,因此主要面向高端高规格摄像头:
•超高像素主摄:如 1 亿像素以上的手机主摄(如小米 12 Ultra 的 IMX989)、专业相机,需高带宽支撑大尺寸图像数据传输;
•高帧率视频录制:如 4K@60fps、8K@30fps 的摄像头(如运动相机、车载 ADAS 前视摄像头),高帧率意味着单位时间内数据量翻倍,需 CPhy 的高带宽支撑;
•空间受限的硬件设计:如小型化设备(无人机、穿戴设备),PCB 面积有限,CPhy 的少引脚优势能简化布局。
三、RK3588 实战:CPhy 与 DPhy 摄像头配置差异
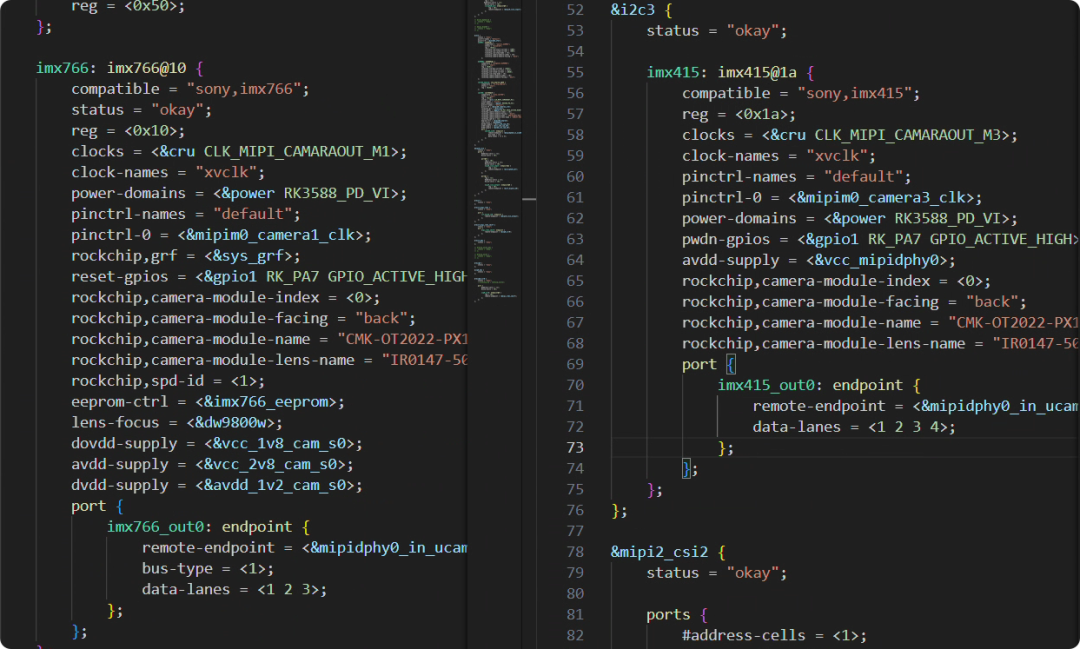
结合你提供的两份 RK3588 设备树代码(CPhy 适配 IMX766,DPhy 适配 IMX415),我们从核心节点、电源引脚、数据链路三个维度,拆解配置差异的关键要点。
1. 核心差异:Phy 节点与硬件使能
Phy 节点是配置的 “入口”,RK3588 对 CPhy 和 DPhy 的节点定义完全不同,且硬件使能逻辑有区别。
|
配置项
|
CPhy(适配 IMX766)
|
DPhy(适配 IMX415)
|
关键说明
|
|
Phy 主节点
|
&csi2_dcphy0(CPhy 在 RK3588 中常标注为 DCPhy)
|
&csi2_dphy0
|
节点名称直接区分 Phy 类型,需确保与硬件对应(RK3588 有多个 Phy 实例,不可混用)。
|
|
Phy 硬件节点使能
|
注释&csi2_dphy0_hw { status = "okay"; };
|
启用&csi2_dphy0_hw { status = "okay"; };
|
DPhy 需显式启用硬件节点(_hw后缀),CPhy 则无需单独启用,这是 RK 平台的特有逻辑。
|
|
数据通道(lane)
|
data-lanes = <1 2 3>(3 lane)
|
data-lanes = <1 2 3 4>(4 lane)
|
因 CPhy 单 lane 带宽更高,3 lane 即可满足 IMX766 需求;DPhy 需 4 lane 匹配 IMX415 的带宽。
|
代码片段对比(CPhy vs DPhy):
|
2. 电源与引脚:DPhy 需专用稳压器,引脚绑定不同
RK3588 的 DPhy 对电源稳定性要求更高,需单独配置 “Phy 专用稳压器”;而 CPhy 可复用其他电源,且两者的时钟引脚、电源引脚绑定也不同。
|
配置项
|
CPhy(IMX766)
|
DPhy(IMX415)
|
关键说明
|
|
Phy 专用稳压器
|
注释vcc_mipidphy0节点(未启用)
|
启用vcc_mipidphy0(固定稳压器)
|
DPhy 需单独供电(GPIO1_PB2 控制使能),确保高速信号稳定;CPhy 可复用摄像头电源。
|
|
引脚配置(pinctrl)
|
pinctrl-0 = <&mipim0_camera1_clk>
|
pinctrl-0 = <&mipim0_camera3_clk>
|
时钟引脚绑定不同(对应 RK3588 的不同摄像头时钟输出通道),需与硬件焊接匹配。
|
|
摄像头控制 GPIO
|
reset-gpios = <&gpio1 RK_PA7>(复位引脚)
|
pwdn-gpios = <&gpio1 RK_PA7>(掉电引脚)
|
控制引脚功能不同(复位 vs 掉电),需根据传感器 datasheet 调整。
|
代码片段对比(电源与引脚):
|
3. 数据链路:CSI 控制器与 CIF 节点需 “一一对应”
RK3588 的摄像头数据传输链路是 “传感器→Phy→CSI 控制器→CIF(摄像头接口前端)→ISP”,CPhy 和 DPhy 需匹配不同的 CSI 控制器和 CIF 节点实例。
|
数据链路节点
|
CPhy(IMX766)
|
DPhy(IMX415)
|
关键说明
|
|
CSI 控制器
|
&mipi0_csi2(MIPI CSI-2 控制器 0)
|
&mipi2_csi2(MIPI CSI-2 控制器 2)
|
RK3588 有多个 CSI 控制器,需与 Phy 实例绑定(CPhy 对应 mipi0,DPhy 对应 mipi2)。
|
|
CIF 节点
|
&rkcif_mipi_lvds(CIF LVDS 接口 0)
|
&rkcif_mipi_lvds2(CIF LVDS 接口 2)
|
CIF 是 Phy 与 ISP 的桥梁,需与 CSI 控制器对应(mipi0→lvds0,mipi2→lvds2)。
|
|
I2C 总线
|
&i2c4(I2C 总线 4)
|
&i2c3(I2C 总线 3)
|
传感器的 I2C 通信总线不同,需与硬件上传感器的 I2C 引脚连接匹配。
|
核心逻辑:RK3588 的硬件设计中,Phy、CSI 控制器、CIF 节点是 “绑定分组” 的,配置时需确保链路全程对应(如 DPhy→mipi2_csi2→rkcif_mipi_lvds2),错配会导致数据传输中断。
四、总结:RK3588 摄像头配置的 3 个关键结论
1.选 Phy 先看需求:
◦若摄像头是 800 万~4800 万像素、帧率≤30fps(如安防、环视),优先选 DPhy(成熟、兼容好、配置简单);
◦若摄像头是 1 亿像素以上或帧率≥60fps(如高端主摄、ADAS 前视),必选 CPhy(高带宽、低功耗)。
1.配置关键检查点:
◦Phy 节点与硬件使能:CPhy 用csi2_dcphy0,DPhy 用csi2_dphy0+csi2_dphy0_hw;
◦数据链路匹配:Phy→CSI 控制器→CIF 节点需一一对应(如 CPhy→mipi0→lvds0,DPhy→mipi2→lvds2),链路是可选的,具体可根据开发手册去配;
◦电源与引脚:DPhy 需启用vcc_mipidphy0,时钟引脚、I2C 总线需与硬件焊接一致。
1.调试避坑技巧:
◦若摄像头无数据,先检查 Phy 和 CSI 控制器的status是否为“okay”;
◦若图像卡顿 / 花屏,检查data-lanes数量是否与传感器匹配,电源电压是否稳定;
◦若 I2C 通信失败,确认reg(传感器地址)和 I2C 总线是否与硬件一致。
掌握 CPhy 与 DPhy 的差异,不仅能快速搞定 RK3588 的摄像头配置,更能在方案选型阶段就选对 “数据高速公路”,避免后期硬件改版或性能瓶颈。你在 RK3588 摄像头开发中遇到过哪些问题?欢迎在评论区交流!
-
RK3588平台USB摄像头调试实战:从报错到稳定运行2026-02-04 1123
-
快速上手RK3588:摄像头调试2025-02-27 4566
-
瑞芯微技术信息简报之rk3588 PK rk3588s2025-02-11 9560
-
迅为RK3588开发板实时系统编译-Preemption系统/ Xenomai系统编译-选择摄像头配置2025-01-18 1308
-
ArmSoM RK3588/RK3576核心板,Rockchip摄像头使用2025-01-08 2546
-
基于RK3588J的6路MIPI CSI视频采集案例分享,多路视频系统必看!2024-08-22 3270
-
浅谈边缘计算AI摄像头嵌入式主板方案,基于东胜物联RK3588核心板2024-07-06 2458
-
迅为电子RK3588S与RK3588硬件性能区别及板卡选型2024-06-25 6886
-
rk3588和rk3588s的区别2023-08-15 21726
-
rk3588调试之imx415摄像头2023-06-09 8626
-
RK3568/RK3588开发板人工智能AI摄像头识别功能方案2023-03-27 5190
-
RK3588芯片支持8K视频的硬编解码2022-07-28 7514
-
基于RK3588芯片打造360度8K全景摄像机的产品解决方案2022-07-26 7483
-
RK3588和RK3588S之间的区别是什么2022-03-10 30244
全部0条评论

快来发表一下你的评论吧 !
