

 深入解析RK平台GPIO驱动:从原理到调试,开发者必看指南
深入解析RK平台GPIO驱动:从原理到调试,开发者必看指南
电子说
描述
GPIO(通用输入输出)作为嵌入式系统中最基础也最常用的硬件接口,是连接芯片与外部设备的 “桥梁”。从简单的 LED 控制、按键检测,到复杂的传感器通信,都离不开 GPIO 的支持。在瑞芯微(RK)平台上,GPIO 驱动的实现直接影响着硬件交互的稳定性与效率。本文将带你深入剖析 RK 平台 GPIO 驱动的核心逻辑、使用方法,以及对调试工作的关键意义。
一、RK 平台 GPIO 驱动的核心逻辑:从硬件到内核框架
RK 平台的 GPIO 驱动代码(如gpio-rockchip.c)本质上是 Linux 内核与 RK 芯片 GPIO 控制器之间的 “翻译官”,它将内核的标准 GPIO 接口转化为对硬件寄存器的操作。其核心逻辑可总结为 **“硬件适配 + 框架兼容”**:
1. 硬件差异:不同版本 GPIO 控制器的适配
RK 芯片的 GPIO 控制器存在多个硬件版本(如代码中的GPIO_TYPE_V1、GPIO_TYPE_V2等),不同版本的寄存器布局和功能存在差异。驱动通过定义不同的寄存器映射表来适配这些差异:
|
// V1版本寄存器布局
static const struct rockchip_gpio_regs gpio_regs_v1 = {
.port_dr = 0x00, // 数据寄存器(输出值)
.port_ddr = 0x04, // 方向寄存器(输入/输出配置)
.int_en = 0x30, // 中断使能寄存器
// ... 其他寄存器
};
// V2版本寄存器布局(地址和功能与V1不同)
static const struct rockchip_gpio_regs gpio_regs_v2 = {
.port_dr = 0x00,
.port_ddr = 0x08, // 方向寄存器地址与V1不同
.int_en = 0x10, // 中断使能寄存器地址与V1不同
.int_bothedge = 0x30, // V2新增:双边沿触发寄存器
// ... 其他寄存器
};
|
驱动初始化时会通过读取version_id寄存器(如gpio_regs_v2.version_id = 0x78)自动识别硬件版本,选择对应的寄存器映射表,确保操作的准确性。
2. 内核框架兼容:对接 Linux gpiolib
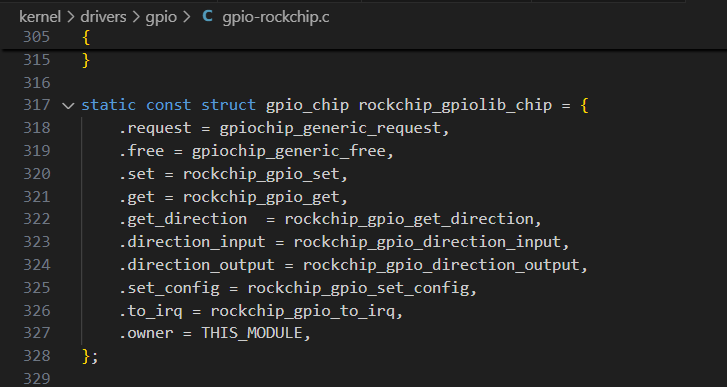
为了让上层应用和其他内核模块通过统一的接口使用 GPIO,RK 驱动严格遵循 Linux 内核的gpiolib框架,实现了标准的 GPIO 操作函数:
•方向控制:rockchip_gpio_set_direction通过操作port_ddr寄存器设置 GPIO 为输入或输出;
•电平读写:rockchip_gpio_set(写输出电平)和rockchip_gpio_get(读输入电平)操作port_dr和ext_port寄存器;
•中断管理:rockchip_irq_set_type配置中断触发方式(边沿 / 电平),rockchip_irq_demux负责中断分发;
•去抖配置:rockchip_gpio_set_debounce通过debounce寄存器和时钟分频实现按键去抖。
这些函数被封装为gpio_chip结构体,注册到内核后,上层即可通过gpiod_get、gpiod_set_value等标准接口操作 GPIO,无需关心底层硬件细节。
二、RK GPIO 的使用方法:开发者如何快速上手
基于 RK 驱动的 GPIO 使用遵循 Linux 内核的标准 GPIO 接口,开发者无需直接操作硬件寄存器,只需调用以下核心接口即可:
1. 基础输入输出操作
•申请 GPIO:通过gpiod_get获取 GPIO 句柄,指定引脚编号和方向(如输入GPIOD_IN、输出GPIOD_OUT_LOW);
•设置输出电平:使用gpiod_set_value设置高 / 低电平(1/0);
•读取输入电平:通过gpiod_get_value获取当前电平;
•释放 GPIO:使用gpiod_put释放句柄,避免资源泄露。
示例代码(内核模块中):
|
struct gpio_desc *gpio;
// 申请GPIO(假设使用GPIO4_5,输出模式,初始低电平)
gpio = gpiod_get(dev, "led", GPIOD_OUT_LOW);
if (IS_ERR(gpio)) {
dev_err(dev, "Failed to get GPIOn");
return PTR_ERR(gpio);
}
// 设置高电平(点亮LED)
gpiod_set_value(gpio, 1);
// 释放GPIO
gpiod_put(gpio);
|
2. 中断功能使用
若需要通过 GPIO 中断检测外部事件(如按键按下),步骤如下:
1.通过gpiod_to_irq将 GPIO 转换为中断号;
2.使用request_irq注册中断处理函数;
3.配置中断触发方式(边沿 / 电平,通过设备树或irq_set_irq_type设置)。
示例代码:
|
int irq;
// 获取中断号
irq = gpiod_to_irq(gpio);
if (irq < 0) {
dev_err(dev, "Failed to get IRQn");
return irq;
}
// 注册中断处理函数(上升沿触发)
ret = request_irq(irq, button_irq_handler, IRQF_TRIGGER_RISING, "button", dev);
if (ret) {
dev_err(dev, "Failed to request IRQn");
return ret;
}
|
3. 设备树配置
在设备树中,需要指定 GPIO 所属的控制器、引脚编号及功能(如复用为 GPIO 而非其他外设)。例如:
|
led {
compatible = "gpio-leds";
led0 {
gpios = <&gpio4 5 GPIO_ACTIVE_HIGH>; // 使用GPIO4组的第5个引脚,高电平有效
label = "rkled";
};
};
|
三、对调试者的意义:从驱动代码到硬件问题定位
对于调试者而言,理解 RK GPIO 驱动的实现细节是解决硬件交互问题的关键。以下场景中,驱动代码的知识能直接加速问题定位:
1. 寄存器级调试:绕过软件直接验证硬件
当怀疑软件逻辑有误时,可通过读写寄存器直接验证 GPIO 硬件是否正常。例如:
•若 GPIO 输出异常,可通过devmem命令直接写port_dr寄存器(如 V2 版本的0x00和0x04地址),观察硬件是否响应;
•若输入电平读取错误,可读取ext_port寄存器(如 V2 版本的0x70),确认硬件输入是否正确。
驱动中rockchip_gpio_writel和rockchip_gpio_readl函数明确了不同版本寄存器的操作方式,调试时需根据硬件版本选择正确的地址。
2. 中断问题排查:从驱动逻辑到硬件信号
中断不触发或误触发是常见问题,结合驱动代码可从以下角度排查:
•中断掩码:驱动中int_mask寄存器(如 V2 的0x18)控制中断屏蔽,若中断不响应,可检查该寄存器是否被意外屏蔽;
•触发方式:rockchip_irq_set_type函数中,边沿触发需配置int_type和int_polarity,双边沿触发需设置int_bothedge(V2 特有),若触发方式错误,可通过修改寄存器验证;
•中断状态:int_status寄存器(如 V2 的0x50)记录未处理的中断,若中断丢失,可检查该寄存器是否有残留状态。
3. 去抖功能失效:时钟与寄存器配置检查
按键抖动导致的误触发可通过驱动的去抖功能解决,若去抖失效,可结合rockchip_gpio_set_debounce函数排查:
•V2 版本通过dbclk_div_con配置分频系数,dbclk_div_en使能去抖,需确认时钟(db_clk)是否使能、分频是否正确;
•若去抖时间不符合预期,可根据代码中div = debounce * freq公式计算分频值,验证寄存器配置是否与预期一致。
4. 版本兼容性问题:区分 V1/V2 硬件差异
不同版本 GPIO 控制器的寄存器操作差异可能导致功能异常。例如:
•V2 版本的port_dr寄存器分为两个 16 位寄存器(0x00和0x04),驱动通过gpio_writel_v2组合读写,若误按 V1 方式操作,会导致高 16 位引脚控制失效;
•V1 版本无int_bothedge寄存器,双边沿触发需通过软件模拟(驱动中toggle_edge_mode标记),若在 V1 硬件上使用双边沿触发,需确认软件逻辑是否正确。
四、总结:驱动是连接软件与硬件的“桥梁”
RK 平台的 GPIO 驱动不仅实现了硬件功能的封装,更通过对接 Linux 标准框架简化了上层开发。对于开发者,掌握标准接口即可快速实现硬件交互;对于调试者,理解驱动的寄存器操作、中断逻辑和版本差异,能直接定位从软件到硬件的各类问题。
无论是 LED 闪烁、按键检测还是复杂的中断响应,GPIO 驱动都是底层交互的核心。深入理解其原理,不仅能提高开发效率,更能在遇到疑难问题时快速突破 —— 毕竟,能看透 “桥梁” 结构的人,才能更好地驾驭它连接的两岸。
希望本文能为 RK 平台的开发者和调试者提供实用的参考,让 GPIO 这一 “基础接口” 发挥更大的价值。
-
深入解析U-Boot image.c:RK平台镜像处理核心逻辑2026-02-24 2015
-
一文吃透RK平台OTA升级开发:从逻辑到调试的完整指南2026-02-09 1182
-
RK平台Linux IOMMU开发:从原理到实战2026-02-04 3540
-
RK开发者大会照片墙全解析:70 家方案商生态图谱2025-12-15 1756
-
RK3568驱动指南|第十二篇 GPIO子系统-第130章 GPIO的调试方法2025-06-03 1664
-
迅为RK3568开发板驱动指南GPIO子系统GPIO子系统API函数的引入2025-05-29 1333
-
迅为RK3568驱动指南GPIO子系统 GPIO操作函数实验2025-05-28 1680
-
迅为RK3568开发板驱动指南GPIO子系统三级节点操作函数实验2025-05-26 1781
-
Banana Pi BPI-W3 RK3588平台驱动调试篇 [ PCIE篇二 ] - PCIE的开发指南2023-11-02 2327
-
喜报|HarmonyOS开发者社区连获业内奖项,持续深耕开发者生态2023-01-19 4118
-
HDC 2022 开发者主题演讲与技术分论坛干货分享(附课件)2022-11-25 2120
-
2021 OPPO开发者大会:小布开发者平台生态2021-10-27 3315
-
绝对干货!HarmonyOS开发者日资料全公开,鸿蒙开发者都在看2021-08-04 26924
-
系统开发者指南:使用SCPI和直接I/O与驱动程序2019-09-12 2268
全部0条评论

快来发表一下你的评论吧 !
