

“视力+智力”的毫米波雷达,有望颠覆未来车载传感器市场
描述
麦姆斯咨询认为毫米波雷达技术的发展趋势是朝着体积更小、功耗更低、集成度更高和多传感器融合方向发展。毫米波雷达目前最大的“缺陷”就是“视力”不足,无法辨识行人和对周围障碍物进行精准的建模,而“视觉”是实现高级自动驾驶最重要的环境感知。所以,为了帮毫米波雷达实现“视觉”功能,现在主流的做法是采用取长补短的方式,将毫米波雷达与其他“视觉”传感器(摄像头或激光雷达)技术融合。不过无论是摄像头,还是激光雷达都容易受光线或恶劣天气影响,性能会降低甚至失效,这种“视力”是有条件限制的。
于是,很多新兴企业在探索创新的毫米波雷达成像技术,意图让雷达自己“开眼”。要想雷达成像,最核心的方向是提高雷达的分辨率。传统的提高雷达分辨率方法中,增加带宽是一种方式,当前77GHz(频段76~77GHz)带宽在1GHz,而79GHz(频段76~81GHz)带宽可高达5GHz,显然79GHz在分辨率上会更胜一筹而成为未来雷达成像主要的选择。当然带宽有固定限制,还有一种方法就是扩展天线的尺寸或者增加天线的数量。在车载毫米波雷达领域,囿于主机厂对毫米波雷达整体尺寸的车规级限制,这里的发挥空间并不大。所以,需要突破常规另辟蹊径,目前比较热门的方法有:合成孔径雷达(SAR)、多输入多输出技术(MIMO)、超材料天线技术等。目前,部分技术已经取得了突破性的进展,智能雷达的图像分辨率已经迫近现有光学分辨率。下面我们概述这些雷达成像技术。
合成孔径雷达(SAR)合成孔径雷达(Synthetic Aperture Radar,简称SAR),是一种利用合成孔径技术及脉冲压缩等信号处理技术来实现高分辨率成像的雷达。SAR利用雷达与目标的相对运动,把尺寸较小的真实天线孔径用数据处理的方法合成一个较大的等效天线孔径,故称“合成孔径”雷达。SAR具有体积小、全天时、全天候、高分辨、大幅宽等多种特点。最初主要是机载、星载平台,随着技术的发展,出现了弹载、地基、无人机、临近空间平台、手持式设备、车载等多种形式平台搭载的SAR,广泛用于军事和民用领域。高分辨率在这里包含着两方面的含义:即高的方位向分辨率和足够高的距离向分辨率。它采用多普勒频移理论和雷达相干理论为基础的合成孔径技术来提高雷达的方位向分辨率;而距离向分辨率的提高则通过脉冲压缩技术来实现。其基本原理如下(图1):
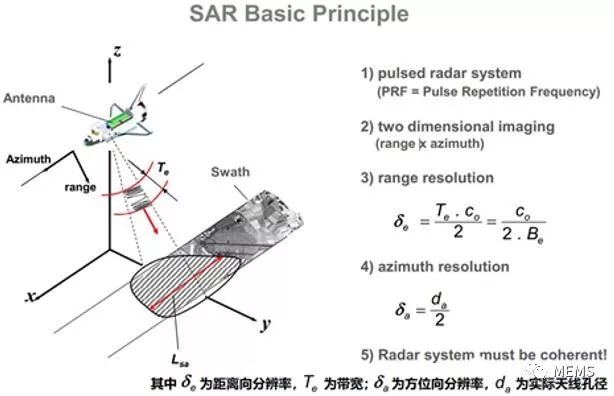
图1 SAR基本原理(1)合成孔径技术实现方位向高分辨率SAR利用机载平台带动天线运动,如图2,在不同位置上以脉冲重复频率(PRF)发射和接收信号,并把一系列回波信号存储记录下来,然后作相干处理,就如同在所经过的一系列位置上,都有一个天线单元在同时发射和接收信号一样,这样就在平台所经过的路程上形成一个大尺寸的阵列天线,从而获得很窄的波束。如果脉冲重复频率达到一定程度(足够高),以致相邻的天线单元间首尾相接,则可看作形成了连续孔径天线。诚然这个大孔径天线要靠信号处理的方法合成。这也是“合成孔径”名字的原由。
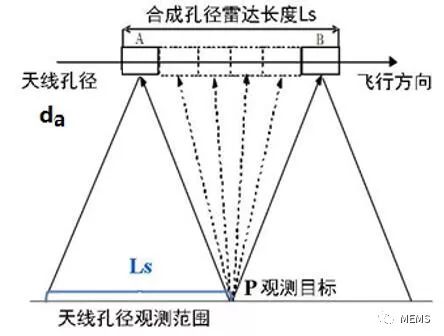
图2 SAR示意图根据SAR方位向分辨率的公式(见图1公式4),我们可以得知SAR的分辨率与波长和目标与天线的距离无关,而只与雷达的实际孔径尺寸有关,而且天线尺寸越小,方位向分辨率越高,这与普通雷达的方位分辨率恰恰相反,从而大大的减小了雷达的体积,对频率特定和空间有限的车载平台而言是再合适不过了。(2)脉冲压缩技术实现距离向高分辨率雷达距离向分辨率由雷达的带宽决定(见图1公式3),要想提高雷达的距离分辨率,则可减小脉宽或加大宽带,但如果脉宽太小则平均功率太小,雷达的作用距离会受到很大的限制,所以我们希望雷达波形既具有较大的带宽,又具有较长的持续时间。如果在一个带宽信号的各频谱分量上附加一个随频率作非线性变化的相位值,此宽带信号将具有很长的持续时间,以满足前述要求。这种附加的非线性相位的过程称为信号的展宽过程,将展宽后的信号通过匹配滤波器,校正非线性相位使之同相,在匹配滤波器输出端将得到窄脉冲型号,这个过程称为脉冲压缩。
最早加以研究并获得使用的脉冲压缩信号就是线性调频信号,线性调频信号具有平方律的相位频率关系,经过匹配滤波器的压缩,可以输出窄脉冲。总之,采用脉冲压缩波形,相对于原来的宽脉冲而言,由于通过匹配滤波器的压缩,大大的改善了雷达的距离分辨率。多输入多输技术(MIMO)多输入多输出技术(Multiple-Input Multiple-Output,简称MIMO),是指在发射端和接收端分别使用多个发射天线和接收天线,使信号通过发射端与接收端的多个天线传送和接收,在不增加频谱资源和天线发射功率的情况下,可以成倍的提高系统信道容量。与SAR思想不同,MIMO雷达是利用多发多收的天线结构等效形成虚拟的大孔径阵列,以获得方位向的高分辨力。而这种虚拟阵的形成是实时的,能够避免传统的SAR成像中存在的运动补偿问题。故MIMO雷达在成像应用上有其独特的优势。
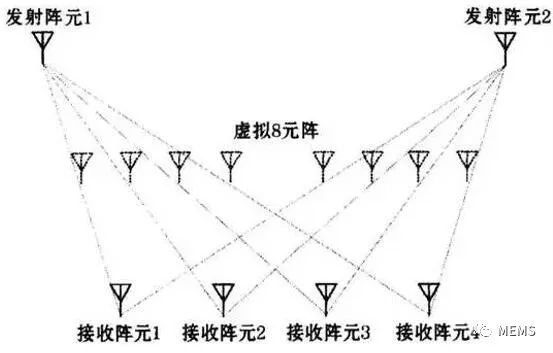
图3 MIMO示意图
如图3,一对发射阵元和接收阵元可以虚拟出一个收发阵元,则对于M发N收的MIMO雷达,发射阵元和接收阵元共有M x N对,即可以虚拟出M x N个收发阵元,其个数一般是远远大于N的,从而实现了阵列孔径的扩展。例如2发4收的MIMO雷达,可以形成8元的虚拟阵列。如此,德州仪器(TI)3发4收的AWR1243雷达,可以形成12元的虚拟阵列。
图4 德州仪器MIMO雷达的FFT输出图图4为TI测试的MIMO雷达的FFT输出图,很明显通道数越多,精细程度就越高。TI通过级联4个单芯片AWR1243雷达前端器可以实现成像功能。AWR1243中集成的DSP能够将无线电波捕获的数据转译为点云图。如图5,显示了TI级联雷达传感器创建的图像。该级联雷达能探测250 m以外的车辆,40米处可以做到1度的方位角分辨率,也就是4.5厘米的精度和大约9厘米的物体分离精度。MIMO具备很宽的视场角(FOV),TI这种4个级联的雷达FOV高达192度。而摄像头的话80度的FOV都算是广角了,边缘处可能有广角失真。
图5 TI级联雷达传感器创建的图像MIMO-SAR雷达传统SAR是对三维(3D)场景的二维(2D)成像,图像中所有的像素点实际是具有相同距离的所有俯仰向散射体的迭加,因而存在着圆柱对称模糊、叠掩现象等问题,难以满足越来越高的成像精度和复杂环境侦查的要求。结合了MIMO和SAR两种技术优势的MIMO-SAR雷达,能够在距离向宽带分辨和方位合成孔径分辨的基础上增加俯仰向实孔径的分辨能力。通过俯仰向并行收发以及优化布阵,可以获取目标的第3维信息(高度),避免3D空间到2D平面投影的信息损失。因此,MIMO-SAR雷达是实现3D成像的最佳解决手段之一。以色列创新公司Arbe Robotics最先实现了高分辨率的4D成像雷达(3D位置+1D速度),该雷达就是采用了结合MIMO的SAR的成像技术。根据Arbe Robotics公司发布的在线演示数据显示(图6),Arbe Robotics高分辨率雷达可提供“100度的宽视场(FOV)”,可探查到300米外的障碍物,其方位角分辨率及仰角分辨率分别达到1°和3°。
图6 Arbe Robotics 4D高分辨率雷达在线演示数据超材料天线+SAR除了利用MIMO和SAR技术提高雷达分辨率外,还可以考虑改变天线自身材料结构特性来提高雷达的分辨率,其中超材料(metamaterial)就是种不错的选择。所谓超材料,是指一些具有人工设计的结构并呈现出天然材料所不具备的超常物理性质的复合材料。超材料的设计思想是新颖的,这一思想的基础是通过在多种物理结构上的设计来突破某些表观自然规律的限制,从而获得超常的材料功能。典型的超材料有:左手材料、光子晶体、超磁性材料、金属水等。
图7 具备人工特殊结构的“超材料”2017年3月,美国杜克大学搭建了基于动态超表面孔径的SAR,并进行了2D和3D成像测试。该系统灵活、高效、价格便宜,生成的图像质量不低于传统合成孔径雷达。这个雷达的天线由互补、谐振的超材料单元组合的微带线构成,每一个超材料单元包含两个偶极子,与外部控制电路相连,超材料单元的谐振可通过偏置电压进行衰减控制。动态超表面孔径的每一个谐振电路发射并接收某一特定的频率,工作频率也可通过调谐电路的电子特性进行更改,类似于无线电调谐器。孔径产生的总辐射方向图是每一单个辐射器的辐射方向图的叠加。通过给控制电路施加不同的电压,可接通部分辐射单元,形成不同指向、不同形状的方向图,并可为每一波束选择特定的工作频率。动态超表面提供的灵活性能够给SAR带来多种能力,可形成窄波束增强信号强度,在方向图上形成零点回避干扰,也可使用宽波束观察大范围区域,甚至可以同时形成多个波束探测多个位置,如图8。由于动态超表面可以大批量低成本印制,将会显著降低雷达的成本。
图8 超材料孔径雷达原理示意图备受上汽、现代、英飞凌等青睐的硅谷创新公司麦得威国际(Metawave),其智能汽车雷达系统WARLORD采用了一种自适应超材料。该超材料由微软件控制,具有独特电磁特性的电路板结构(图9),可模拟相控阵。传统的相控阵天线采用多个辐射元件,通过轻微改变信号发射的相位来形成波束并进行波束转向,但是,Metawave的系统仅利用一个单天线便能提供同等的性能。其结果便是显著简化系统,使其更高效,以获得最先进的数字波束成形雷达。
图9 Metawave采用的自适应超材料
人工智能和算法融合前面我们探讨的几种技术——SAR、MIMO和超材料,彼此并不冲突,可以叠加使用,获得更高的探测物体的精度。不过这些技术都只是帮助雷达增长“视力”,使其能够“看的见”和“看的清”,但自动驾驶的最终目的,是对人的解放,更重要的还要让雷达具有“智力”,能够识别所探测到的物体到底是什么,只有“明白是什么”才能为驾驶做出正确的判断和决策,才能真正实现无人驾驶。所以在各类成像雷达技术中还融合了人工智能算法。要获得高分辨率,数据的采集量和处理量是庞大的,特别自动驾驶对实时处理要求又特别苛刻,因此雷达成像首先对数据的存取和处理速度带来了极大的挑战。
之前,77Ghz雷达的大多是采用多芯片的方案,开发难度、测试设备等都需要长时间线的验证。不过随着各主要半导体芯片供应商德州仪器(TI)、意法半导体(ST)、亚德诺(ADI)、恩智浦(NXP)等相继推出77GHz CMOS毫米波芯片,尤其是CMOS单片微波集成电路(MMIC)的量产正改变这种格局。MMIC一方面降低了整个77Ghz雷达的研发难度,产品合格率与成本都会发生很大变化;另一方面,单芯片的高度集成,甚至可以与微控制单元(MCU)和数字信号处理(DSP)集成在一起,也就意味着可以在雷达芯片上集成能够进行模式识别和机器学习的算法,从而让雷达能够“识人辨物”。
另外,还可以让这些具备机器学习能力的雷达和其它摄像头、惯性测量单元等传感器进行融合,为自动驾驶汽车增加更多的安全保障。比如,Arbe Robotics在其智能雷达中融合了同时定位与地图构建(SLAM)算法,能够和4D成像系统协同工作,改善目标物体分类和识别,增强分辨率,去除造成系统故障和事故的误报(图10)。
图10 Arbe Robotics 4D高分辨率雷达目标物体识别和分类又如,Metawave在其智能雷达WARLORD中嵌入了人工智能引擎(AI Engine),内置了多种算法,包括杂波干扰抑制算法、目标检测和跟踪算法等等,极大的提升了毫米波雷达的整体性能,让其具备物体识别和分类能力(图11)。
图11 Metawave 智能雷达WARLORD目标物体识别和分类
随着这些成像技术的不断发展和人工智能算法的日新月异,毫米波雷达在成像性能上正不断接近现有的激光雷达性能,这些新型雷达甚至有取代部分激光雷达的趋势。其次,毫米波雷达在工艺成本和体积上也优于当前昂贵且笨重的激光雷达,再加上毫米波雷达固有的全天候全天时优势。我们相信假以时日,有了“视力”和“智力”的毫米波雷达,犹如打通了任督二脉,前途不可限量,有望颠覆车载传感器市场,无论是现阶段的ADAS,还是更高阶的自动驾驶,甚至是终极的无人驾驶,都将是自动驾驶中最不可取代的核心传感器!
-
教你设计单芯片毫米波雷达传感器2018-06-12 0
-
毫米波雷达方案对比2018-08-04 0
-
车载毫米波雷达的技术原理与发展2019-05-10 0
-
汽车毫米波雷达传感器的性能一致性2019-07-29 0
-
车载毫米波雷达的原理是什么?2019-08-07 0
-
浅析车载毫米波雷达2019-09-19 0
-
毫米波雷达(一)2019-12-16 0
-
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能2020-06-03 0
-
毫米波雷达的特点是什么2021-07-30 0
-
雷达传感器模块,智能存在感应方案,毫米波雷达工作原理2021-10-28 0
-
漫谈车载毫米波雷达历史2022-03-09 0
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 0
-
毫米波雷达的应用:关于毫米波传感器的介绍2018-08-02 10645
-
视力+智力助力打通毫米波雷达“任督二脉”2020-12-26 669
-
传感器科普:毫米波雷达(三)2023-09-13 1898
全部0条评论

快来发表一下你的评论吧 !
