

简要说明ML4425的工作原理
描述
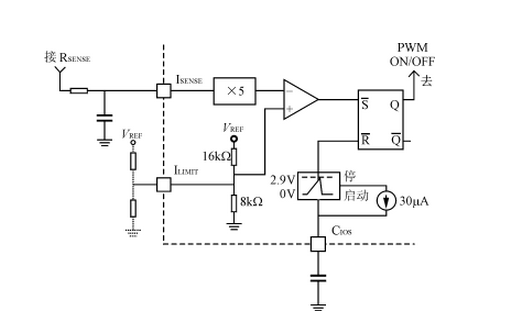
ML4425的整个运行状态可分为三种。第一种为复位校准状态,复位校准的时间由外接的起动电容CAT决定。复位校准时刻,上桥臂HA、HC和下桥臂LB导通,电机转子在磁力线的作用下慢慢转动,使得磁极中心线与B相绕组中心线重合;复位校准状态完成后,起动脚CAT由低电平慢慢变为高电平2.01V,同时片内压控振荡器开始起振,系统进入开环升速状态。电机转速升至可产生足够大的反电动势后,系统进人闭环换相状态。当20脚SPEED FB小于8脚SPEEDSET设定电压时,电机处于加速状态。在此期间,电机受到由12脚/LIMIT的控制,控制下桥N型通道的驱动,占空比为100%。当20脚SPEED FB接近8脚SPEED SET设定电压时,电机进人PWM稳定控制状态。此时6脚外接电容CT开始充电,产生频率为50μA/2·4V×CT的PWM锯齿波。此锯齿波通过与8脚SPEED SET设定电压相比较,产生PWM波形,控制下桥N型通道的功率驱动,进而对电机进行速度控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
TI官方BLE Bridge串口转蓝牙源码+简要说明文档2017-11-03 2117
-
请问参与竞标时应该做什么类型的简要说明?2019-08-01 1436
-
ECG的工作原理是什么?2021-06-15 4165
-
熔丝位简要说明2021-07-21 1613
-
Socket API简要说明2022-01-11 1378
-
基于ML4425的无人机设计项目2022-07-19 2434
-
无传感器的直流无刷电机控制器ML4425及其应用(2)2009-07-08 6421
-
无传感器的直流无刷电机控制器ML4425及其应用(1)2009-07-09 3723
-
收银程序安装简要说明2016-02-29 608
-
交换机6000简要说明2016-12-23 834
-
汉邦7000SDK V3.0.11.610开发软件简要说明2017-01-04 928
-
CreMedia7.2客户端简要说明文档2017-03-21 1425
-
SL-DIY02-51单片机简要说明2017-09-21 883
-
进行对无刷电机控制器ML4425/4426的介绍并运用2018-09-26 12901
-
ML4425对无位置传感器电机驱动的注意事项2018-09-30 7381
全部0条评论

快来发表一下你的评论吧 !
