

实现高稳态精度速度控制的电机控制系统的设计
描述
如前所述,将锁相环技术引人电机的速度控制系统中,能够实现高稳态精度的速度控制。如图1所示,锁相环稳速模块实现电子锁相环中鉴相器和低通滤波器的功能,而无刷直流电机、电机控制器、逆变桥和转子位置检测装置共同组成带有惯性的电压控制振荡器。
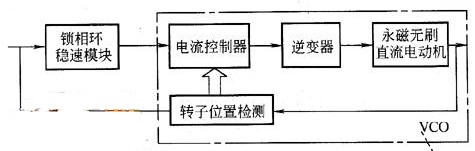
图1 锁相环在电机控制中的原理框图
虽然整个锁相环稳速控制系统属于闭环控制系统,但误差放大器仍可连成跟随器,锁相环电路输出直接与误差放大器的同相端相连,通过锁相环自身的调节改变PWM反相端电压,进而改变PWM占空比,控制转速。锁相环TC9242与MC33035接口框图如图1所示。
PLL稳速模块的原理框图如图2所示。
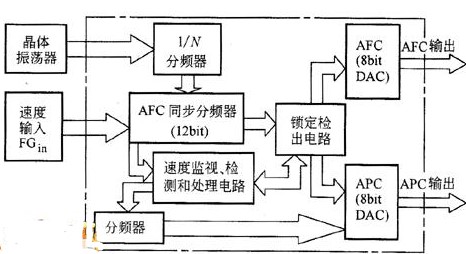
图2 锁相环稳速模块原理图
PLL稳速模块由晶体振荡器和可变系数的分频器、反馈信号处理电路、F/V变换和P/V变换等几部分组成。晶体振荡器(频率精度以百万分数记)和可变系数的分频器提供高精度的频率基准信号,这是PLL模块最终实现高精度稳速的前提保证;锁相环模块的最大特点是用两个8bit DAC分别作为F/V和P/V变换。根据PGIN输人的电机实际转频信号,从AFC(自动频率控制)输出的是第一个DAC将数字量的频率差变换为模拟量的信号;从APC(自动相位控制端)输出的是电机实际转频信号和从同步时钟信号分频信号比较得到的相位差,经过另一个DAC转换的输出电压信号。使用时,将AFC输出和APC输出连接至加法运算放大器,进行信号混合,通过调节控制器的控制电压输人Vin,控制电机的功率开关管。当从FGIN来的反馈频率变化即电机转速不稳定时,AFC和APC输出遵循以下规律:
1)FGIN在锁定范围以下时,AFC和APC为高电平(1),如图3所示;
2)FGIN在锁定范围以上时,AFC和APC为低电平(0),如图3所示:
3)FGIN在锁定范围之内时,AFC线性输出,随着转速信号FGIN的增大而减小,如图3所示。
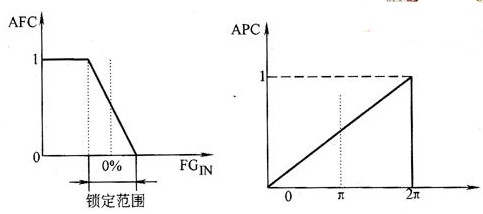
图3 AFC输出和APC输出
APC输出锯齿波形,若反馈转速信号FGIN小于设定频率信号几,APC输出斜率为正的锯齿波,如图4 a所示;若反馈转速信号FGIN大于设定频率信号fo,APC输出斜率为负的锯齿波,如图4 b所示。
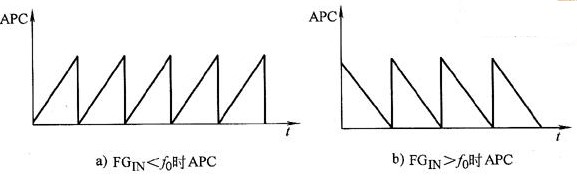
图4 APC输出的波形
不同反馈频率时,相位变换输出和频率变换输出如图5和图6所示。
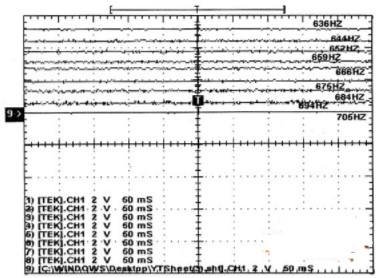
图5 AFC的输出
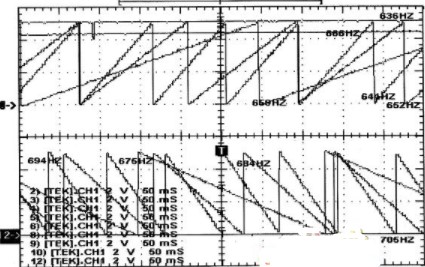
图6 APC的输出
其中,锁定频率范围下限为636Hz,上限为705Hz,锁定频率为666Hz。
由图5可以看出,当反馈频率小于锁定频率时,APC输出三角波形的斜率方向为正;当反馈频率大于锁定频率时,APC输出三角波形的斜率方向为负;而其转折点即是锁定频率666Hz时的波形,为一直线。
相位变换输出是一直角三角波,三角波的平均值和最大值不变,频率为锁相频率与反馈频率之差;对频率变换输出,在锁定范围内,随反馈频率的增加,频率变换输出由最大值线性降为零。
由图6可知,当电机转速低于设定的稳定转速时,锁相环模块输出较高电平,经电机驱动控制模块后,产生PWM信号,经过逆变桥放大后,对电机进行加速;当电机转速高于设定的稳定转速时,锁相环模块则输出为低电平,经过控制模块后,关闭PWM信号,从而使电机减速。通过这种交替加减速,最终使电机稳定在精确的锁定范围之内。锁相环模块在整个稳速过程中起着极为关键的作用,直接决定了系统最终稳态性能的好坏。
-
双电机比值联动控制系统2025-06-18 349
-
步进电机伺服控制系统的作用2024-09-04 2416
-
影响伺服系统稳态速度精度的因素2024-07-29 3145
-
步进电机控制系统是什么意思2024-06-18 2990
-
步进电机控制系统程序如何设计2023-11-16 2223
-
基于DSP的步进电机速度控制系统2021-06-07 2563
-
PID调节控制电机速度控制系统文件下载2021-05-24 1399
-
步进电机的电细分驱动技术实现控制系统的高精度位移2019-10-21 6862
-
用LaBVIEW实现步进电机PID控制系统2019-04-09 3190
-
用于电机控制系统与设计(4)2018-10-25 1678
-
基于DSP的异步电机无速度传感器矢量控制系统的研究与实现2016-04-18 680
-
控制系统的稳态误差2013-04-10 1826
-
步进电机控制系统的设计与实现2010-01-18 1434
-
控制系统的时域分析法--控制系统的稳态误差2009-07-27 3642
全部0条评论

快来发表一下你的评论吧 !
