

华中科技大学:研究面向水陆两栖人体运动识别的柔性多维肌肉形变磁传感阵列
电子说
描述
准确的人体运动识别对于控制可穿戴机器人及虚拟/增强现实等人机交互系统至关重要,而捕获人体运动特征的可穿戴传感设备是实现运动识别的基础(作为运动识别算法的输入)。目前,基于骨骼特征(如关节角度和足底力)的识别方法虽已取得较高精度,但由于这类特征总是滞后于实际肢体运动,会造成导致人机交互响应延迟,影响用户体验。相比之下,作为驱动肢体自主关节运动的唯一动力来源,肌肉的活动通常超前于关节运动,有利于实现更快的人机交互响应。此外,人体肌肉数量远多于相应关节,使基于肌肉的传感方法具有更高的布点灵活性。在肌肉特征方面,机械信号(肌肉变形)比生理信号(如肌电、电阻抗)更加稳定,不易受人体汗液或水下环境影响,更适合作为运动识别的传感方法。然而当前的肌肉形变多限于陆地环境,在水下复杂环境的研究报道甚少。此外,肌肉形变本质上是三维的(包括法向与切向形变),而现有设备大多仅能捕获一维法向信息,忽略了重要的切向形变信息(在驱动肢体旋转、倾斜等运动中起关键作用)。因此,开发能同时捕获三维肌肉形变、适用于水陆两栖环境的可穿戴传感设备,具有重要的研究价值与应用前景。
文章概述:
近日,华中科技大学医疗装备科学与工程研究院、机械科学与工程学院的郭家杰教授课题组,研发出一种可用于水陆两栖人体运动识别的软磁传感阵列。博士生刘宇超为论文第一作者,郭家杰教授为通讯作者。
该研究研制了基于疏水硅胶材料的软磁传感阵列,通过捕获三维肌肉形变分布特征,实现对人体水陆两栖运动的准确识别。传感节点与电路均采用柔性结构,能够紧密贴合人体屈曲的肌肉表面,保证信号采集的稳定性。该传感阵列在水陆环境中表现出高度一致的测量性能,并对水流、水温和水压具有强鲁棒性。
多通道阵列信号通过神经网络标定和插值处理后,可有效提取肌肉形变的三维分布特征。结合卷积神经网络算法,仅使用单个传感阵列,就能取得步态分类准确率98.73%、连续相位估计误差2.85%的优秀性能,这优于目前常用的惯性测量单元(82.40和10.39%)和柔性电阻传感阵列(89.06%和6.33%)。该软磁传感阵列还在机器人手的实时控制演示中,展现出其在动力假肢控制中的应用潜力。本研究有望为机器人智能控制、康复进程监测及运动科学领域的肌肉状态感知提供新思路与技术支撑。
图文导读:

图1.基于软磁传感阵列(SMSA)的水陆两栖人类运动识别
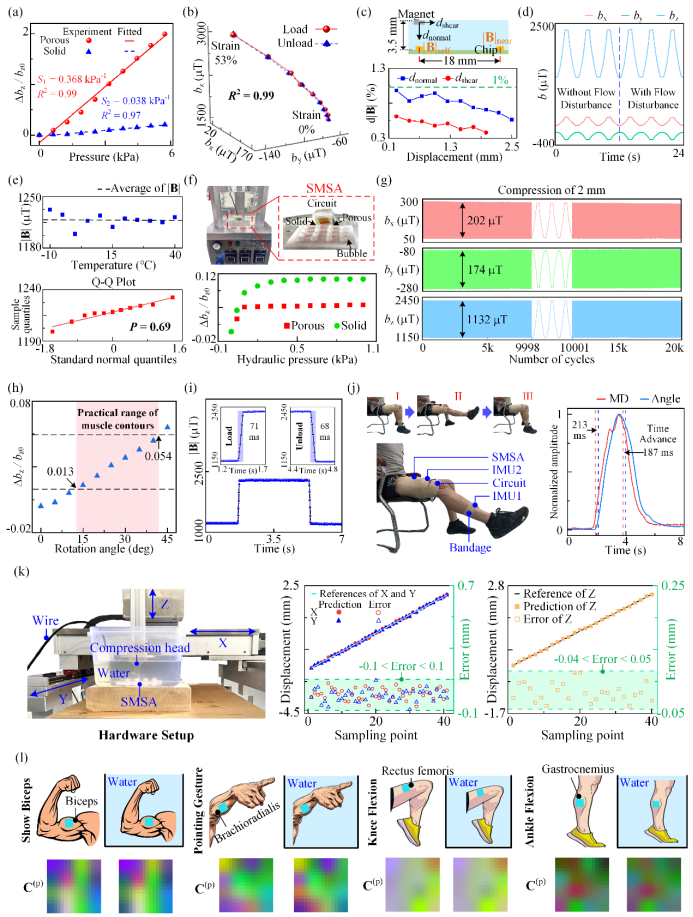
图2.传感器性能表征:(a) 灵敏度;(b) 迟滞效应;(c) 相邻节点干扰;(d) 水流干扰;(e) 水温干扰;(f) 静水压力干扰;(g) 循环压缩;(h) 弯曲效应;(i)-(j) 动态响应速度;(k) 三维形变标定;(l) 水陆两栖环境中的测量一致性
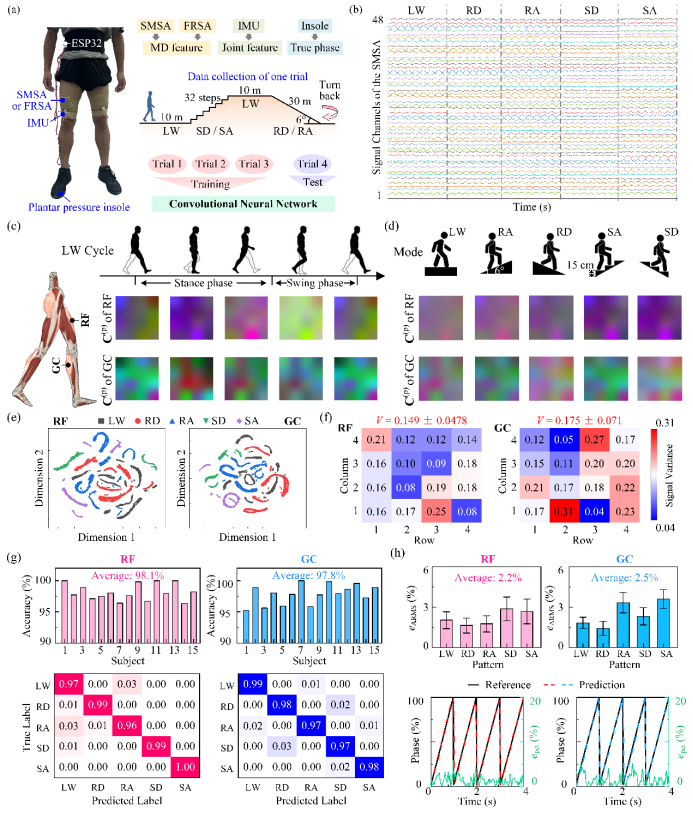
图3.陆地行走监测:(a) 实验设置;(b) 肌肉形变原始信号;(c) 一个行走周期内的肌肉形变三维分布图;(d) 五种步态的肌肉特征;(e) 不同步态下肌肉信号的t-SNE可视化;(f) 不同周期之间信号一致性分析;(g) 行走模式分类;(h) 连续相位估计
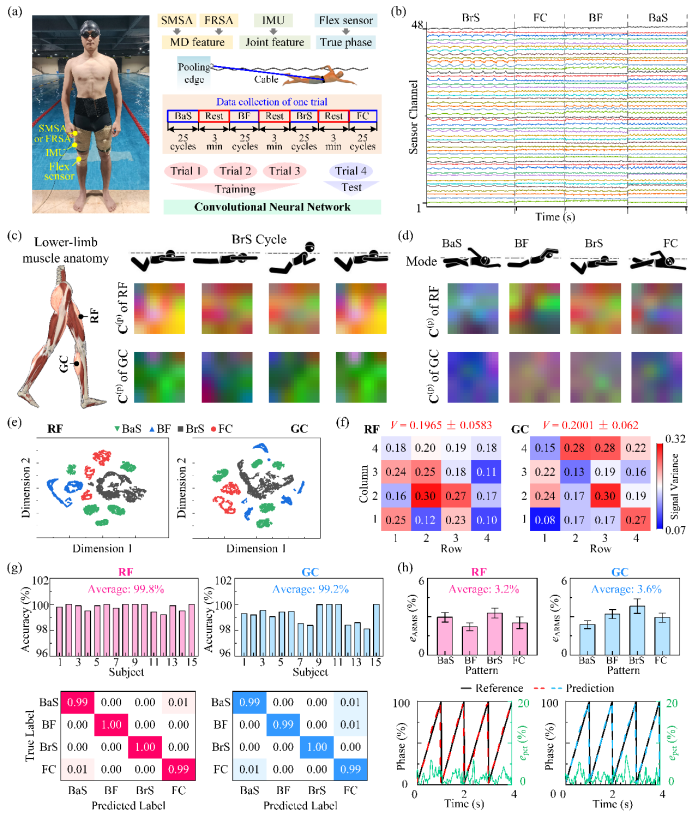
图4.水下游泳监测:(a) 实验设置;(b) 肌肉形变原始信号;(c) 一个蛙泳周期内的肌肉形变三维分布图;(d) 四种泳姿的肌肉特征;(e) 四种泳姿下肌肉信号的t-SNE可视化;(f) 不同周期之间信号一致性分析;(g) 游泳姿势分类;(h) 连续相位估计
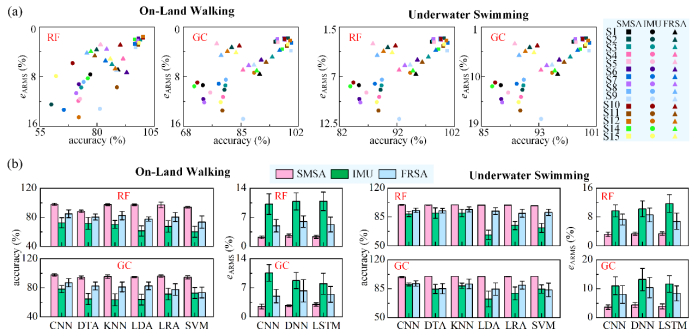
图5.所提出的软磁传感阵列(SMSA)与两种典型商用传感器(IMU和FRSA)在水陆两栖人体运动识别中的性能对比:(a) 全部15名受试者的对比结果;(b) 不同模型下的对比结果
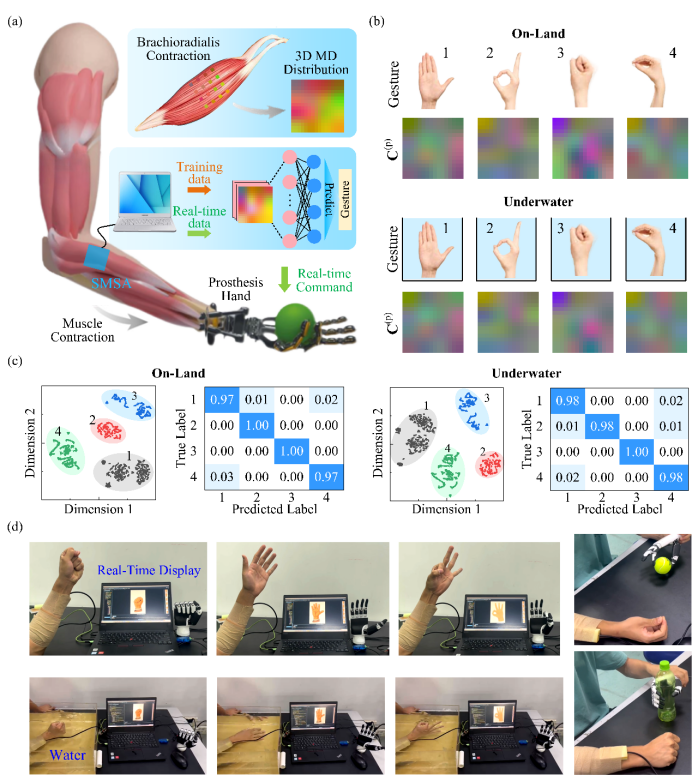
图6.基于软磁传感阵列的水陆两栖手势分类在机器人手实时控制中的应用:(a) 机器人手实时控制流程示意图;(b) 不同手势及其对应的肌肉形变特征;(c) 分类结果的t-SNE分布图与混淆矩阵;(d) 基于手势识别的机器人手实时控制演示
来源:https://doi.org/10.1002/aisy.202500315
-
【PDF】ARM处理器基础_华中科技大学2011-03-11 13538
-
华中科技大学历年研究生招生考试电路试卷真题下载2011-12-28 8996
-
ARM处理器基础_华中科技大学2012-08-15 3605
-
华中科技大学Matlab控制系统讲义2012-08-18 9360
-
msp430单片机原理与应用(华中科技大学)2012-08-20 3239
-
华中科技大学2013年全国大学生电子设计竞赛E题解析2014-08-01 15451
-
电机学(华中科技大)2016-01-12 20199
-
采用STC89C52单片机水陆两栖救灾车系统电路模块设计2014-12-26 1897
-
贵阳市与华中科技将共同建设华中科技大学贵州集成电路联合研究中心及集成电路产业服务平台2019-01-22 2412
-
我国自研大型水陆两栖飞机 AG600 加速研制生产2021-02-18 2627
-
资讯速递 | 华中科技大学OpenHarmony技术俱乐部正式揭牌成立2023-05-28 3093
-
捷先科技与华中科技大学 共建“智能传感器联合研究中心”正式揭牌2023-09-13 1682
-
索尼3LCD激光商用投影机交付华中科技大学2025-07-08 1716
-
华中科技大学与东风汽车首批6个科研项目签约2025-09-01 1129
-
2026开放原子校源行华中科技大学站圆满落幕2026-04-29 954
全部0条评论

快来发表一下你的评论吧 !
