

关于永磁同步电机直接转矩控制中开关表的应用
描述
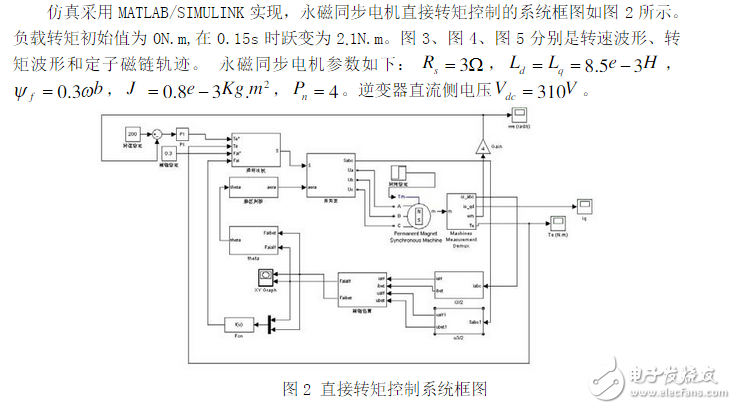
摘要:本文讨论了一种基于电压矢量开关表的对于永磁同步电机的直接转矩控制的方法。由于永磁同步电机电磁转矩的变化与定转子磁链间夹角的正弦值成比例,所以可以通过尽可能的增加定子磁链的转速获得快速的转矩响应。在直接转矩控制里,两相静止坐标系中划分了六个扇区,定子电压矢量的控制是通过选择六个电压矢量中的不同矢量来实现的。文章最后运用仿真实现了该控制策略,仿真结果也显示了直接转矩控制方法的特点。
引言
永磁同步电机以其结构简单,运行可靠,特别是具有其他电机所无法比拟的高效率而得 到人们越来越多的关注。该电机多应用于要求快速转矩响应和高性能运行的场合,而以往控 制永磁同步电机常采用电流控制方法。 直接转矩控制技术是继矢量控制技术之后发展起来的一种新型的高性能交流调速技术。
它应用空间矢量的分析方法,采用定子磁场定向,借助于离散的两点式调节(Band-Band控 制),直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。它省掉了复杂的矢 量变换,控制思想新颖,控制结构简单,信号处理的物理概念明确,转矩响应迅速,对转子 参数不敏感。本文将直接转矩控制技术应用于永磁同步电机的控制中直接控制电机的磁链和 转矩,从而获得起动时间矩、响应速度快的效果,文中对此进行了仿真分析和验证。
1 PMSM 的数学模型
永磁同步电动机中磁链、电流和电压的矢量关系如图 1 所示。其中dq 坐标系固定在转 子坐标系上,转子磁链的轴向为d 轴的正向;定子磁链的方向为x 轴的方向。当忽略定子电 阻时,定转子磁链夹角δ 定义为转矩角。负载恒定且稳态运行时,定转子磁链将以同步速度 旋转,δ 恒定;瞬态时,定转子磁链旋转速度不同,δ 也随之不断变化。建立永磁同步电 机的数学模型,首先假设:
1)忽略电动机铁心的饱和;
2)不计电动机中的涡流和磁滞损耗;
3)转子无阻尼绕组。
故永磁同步电机的电压、磁链和电磁转矩方程为:
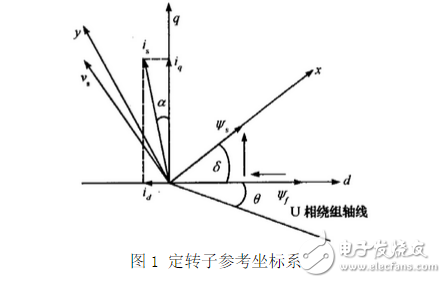
由上式可知,PMSM 的输出转矩由两部分组成:第一项为永磁体产生的励磁转矩;第 二项为凸极结构产生的磁阻转矩。当定子磁链为一恒定值时,电机的转矩随转矩角的变化而 变化。又由于电机机械时间常数远大于其电磁常数,亦即电机定子磁链的旋转速度较转子旋 转速度容易改变,因而转矩角的改变可通过改变定子磁链的旋转速度和方向得以实现。所以 要实现永磁同步电机的直接转矩控制,可以再保持定子磁链幅值不变的情况下,控制定转子 此联之间的夹角。
2 电压矢量的选择
在直接转矩控制中,电压空间矢量是一个非常重要的物理量。逆变器的六个工作电压状 态,给出六个不同方向的运动电压空间矢量,它们周期性的顺序出现,相邻两个矢量之间相 差60°,电压空间矢量幅值不变。两个零开关状态给出两个零电压空间矢量,它们位于六边 形的中心。适当的选择电动机的空间电压矢量,可以使磁链的运动轨迹近似为圆形。电压空 间矢量的选取原则是该矢量能使定子磁链在一个控制周期内改变尽可能大的角度,即转矩变 化最大。忽略定子电阻,则定子磁链与输入电压的关系为如式3-1。

这表明可以通过控制电机的输入电压US,使得定子磁链按照一定的轨迹和速度运动, 从而达到控制磁链的目的。
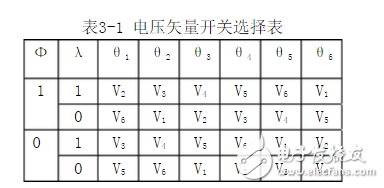
考虑到不同的电压矢量对磁链和转矩的作用及所处的区间不同,可得如表3-1所示的电 压矢量开关选择表。其中Ф=1,表示实际磁链小于参考磁链;λ=1,表示真实转矩小于参考 转矩;当Ф=0或λ=0时反之。
3 仿真分析
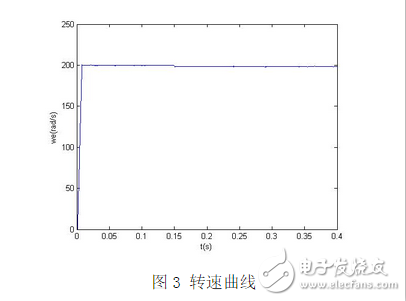
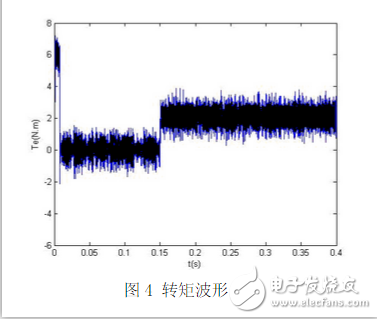
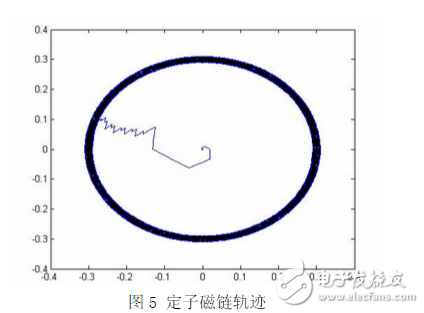
由以上仿真结果可知,该系统转矩响应准确、迅速。在磁场已经建立的情况下,转矩响 应几乎不需要时间,突加负载后,转矩也能较快地跟随负载转,磁链在起动时很快建立起来, 达到额定磁链后可以在动、静态过程中近似保持恒定。转速响应既保证了动态时快速性,又 保证了静态时的稳定性。
结束语
本文分析了永磁同步电机的数学模型,对永磁同步电机直接转矩控制的工作原理进行了 介绍,并构造了仿真模型,对直接转矩控制系统进行了数字仿真。仿真结果表明,该方法具 有良好的动、静态性能。但是针对永磁同步电机的直接转矩控制还有许多问题有待深入,如 弱磁控制,转矩脉动较大等。
-
 叫我杰哥就好
2019-01-11
0 回复 举报楼主您好,能帮我解答下开关表怎么在simulink里边用lookup table做吗?QQ742735263,谢谢! 收起回复
叫我杰哥就好
2019-01-11
0 回复 举报楼主您好,能帮我解答下开关表怎么在simulink里边用lookup table做吗?QQ742735263,谢谢! 收起回复
-
永磁同步电机直接转矩控制(PMSM DTC)simulink仿真2023-03-15 1261
-
永磁同步电机的直接转矩控制简介2021-08-27 1496
-
基于DSP的永磁同步电机直接转矩控制系统2021-05-12 1486
-
永磁同步电机最优直接转矩控制原理及实现方法2018-06-05 1673
-
零矢量在永磁同步电机直接转矩控制中的作用及其仿真研究2017-01-21 1317
-
永磁同步电机模型预测直接转矩控制_牛峰2017-01-08 918
-
占空比调制的永磁同步电机直接转矩控制2017-01-07 813
-
基于开关表的永磁同步电机直接转矩控制2009-12-08 655
-
永磁同步电机直接转矩控制介绍2009-10-16 638
-
永磁同步电机直接转矩控制系统和仿真2009-06-06 610
全部0条评论

快来发表一下你的评论吧 !
