

合理运用ADAMS/MATLA仿真于数控伺服系统中
描述
利用伺服进给系统虚拟样机提供的集成环境对机械系统和电机控制系统进行联合仿真分析,是一种全新的设计方法。在传统的复杂机械系统设计过程中,机械工程师和控制工程师虽然在共同设计开发一个系统,但是他们各自都需要建立一个模型,然后分别采用不同的分析软件,对机械系统和控制系统进行独立调试。如果发现问题,机械工程师和控制工程师又需要回到各自的模型中,修改机械系统和控制系统,然后再进行物理样机的联合调试。实现虚拟样机机构设计与运动控制系统之间的联合仿真,必须在运动控制系统与样机模型间起信息交互的桥梁。
ADAMS(Automatic Dynamic of Mechanical System)提供了对复杂机电一体化系统进行联合仿真分析的方法。ADAMS 软件提供的一种方法是利用ADAMS/Controls 模块,将机械系统仿真分析工具同控制系统设计仿真软件有机地连接起来,实现机电一体化系统的联合仿真分析和复杂机电系统联合仿真。
1. X-Y 工作平台伺服性能仿真系统
1.1 利用ADAMS 对进给驱动机械系统建模
1.1.1 几何建模
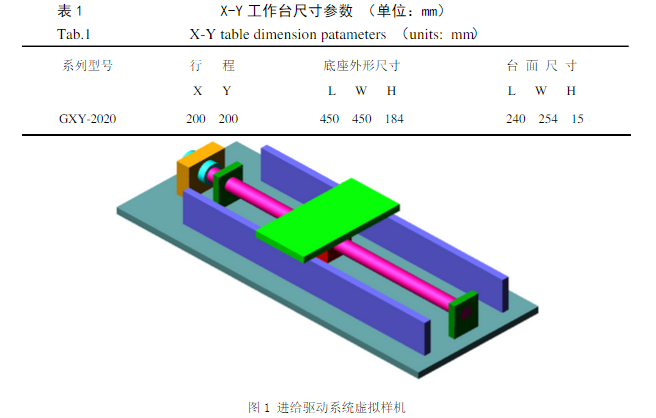
X-Y 工作平台尺寸参数与几何模型如表1 和图1 所示。
1.1.2 模型约束
ADAMS/View 提供的约束副有:理想约束(Idealized joint)、虚约束(Joint primitive)、高副约束(Contact)和运动驱动(Motions generator)等类型。理想约束是通常的具有物理意义的约束副,如:旋转副、移动副、齿轮副等;虚约束用于限制物体之间的相对运动;高副约束用于定义两个物体在运动过程中的接触情况;运动驱动用于驱动模型按一定的规律运动。施加约束的正确与否主要与四个因素有关:约束类型、约束对象、约束位置、约束方向。如图2 和图3 所示。
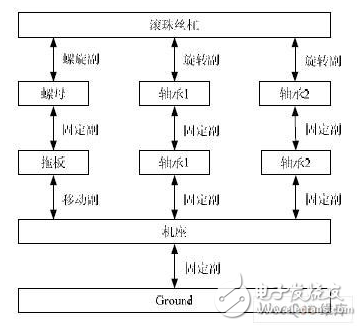
图2 X-Y 平台伺服系统各部件之问的拓扑结构和约束关系
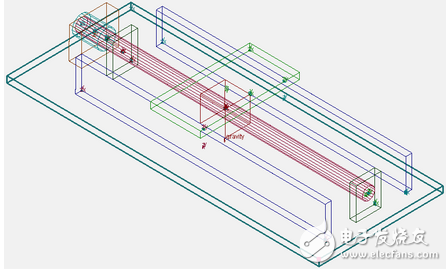
图3 样机中的约束和力
2. MATLAB/ADAMS 接口原理与设计
2.1 定义ADAMS 的输入与输出
需要通过 ADAMS/View 或ADAMS/Solver[6]中的信息文件或启动文件,确定ADAMS 的输入和输出。输出是指进入控制程序的变量,表示从ADAMS/Control 输出到控制程序的变量。而输入是指从控制程序返回到ADAMS 的变量,表示控制程序的输出。如图4 所示。
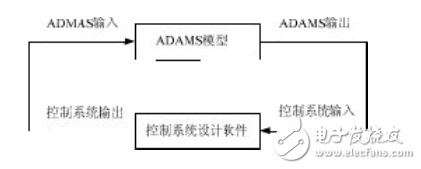
图 4 ADAMS 与MATALB 的接口
通过定义输入和输出,实现 ADAMS 和MATLAB 控制程序之间的消息闭环通讯。即从ADAMS 输出的信号进入MATLAB,同时从MATLAB 输出的信号进入ADAMS 程序。这里所有程序的输入都应该设置为变量,而输出可以是变量或者是测量值。
2.2 MATLAB 环境中构造控制系统的方框图
采用MATLAB/Simulink 工具箱建立的伺服进给系统的控制系统的仿真模型[7],步骤1中在ADAMS/View 环境里建立好的虚拟样机机械系统模型应被设置为控制系统方框图的每一个模块。ADAMS/plant 嵌入在MATLAB 环境中的框图和内核参数对话框分别如图5 所示。
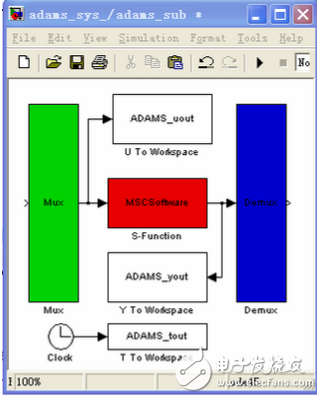
图5 Simulink 中ADAMS 控制框图
结语
(1)实现多领域模型仿真的方法是利用每一特定领域的专门商用仿真软件对该领域子系统进行建模,然后利用这些商用仿真软件提供的接口将不同领域子系统的仿真模型组装成为一个整体。
(2)虚拟样机软件ADAMS 可以实现和仿真控制软件MATLAB/Simulink 无缝连接,通过定义系统输入、输出变量完成控制信息交互,从而进行复杂机电系统联合仿真。
(3)虚拟样机软件ADAMS 为用户自定义函数提供了接口,可以通过自定义动态连接函数实现外部控制数据驱动下的仿真。
(4)性能仿真系统的核心技术是虚拟样机技术,而虚拟样机的核心需要建立准确描述系统的仿真模型,然后与其他相关软件有机关联集成在一起进行系统性能仿真,其关键技术包括建模和仿真技术。
-
数控机床伺服系统由什么组成的2024-06-14 3687
-
数控伺服系统的ADAMS/MATLA联合仿真研究2024-01-19 1403
-
一文读懂数控伺服系统的作用2018-06-01 12561
-
基于Simulink的数控伺服系统仿真和研究2017-01-02 1012
-
数控伺服系统的ADAMSMATLA联合仿真研究2010-07-13 588
-
数控伺服系统的ADAMS MATLA联合仿真研究2009-09-26 957
-
基于模糊理论的数控伺服系统仿真研究2009-06-04 534
-
PSO算法在数控机床交流伺服系统PID参数优化中的应用2009-05-17 4297
-
进给伺服系统2009-02-16 856
-
数控机床的伺服系统2008-09-01 1175
全部0条评论

快来发表一下你的评论吧 !
