

基于TMS320F206 DSP芯片的冗余度TT—VGT机器人运动学设计方案
描述
近年来自动控制技术发展迅猛,特别是计算机技术、网络和通信技术发展的突飞猛进,使人们籍助于许多使能技术的进步和一些开发工具的扩大,将人们构思的自动操作得以付诸实现。如网络控制技术、可编程控制器等均属于自动化控制技术中的使能技术。自动控制技术正向着网络化、集成化、分布化、节点节能化的方向发展。数字信号处理器(DSP)在自动控制中得到了越来越广泛的应用。这主要是因为它具有以下优点:(1)并行体系结构和专用的硬件乘法器使得DSP运算能力极强;(2)高速特性使得DSP能实现实时处理和实时控制。
据调查,目前将DSP应用于机器人控制系统的方案,通常是将机器人位置控制中运动学计算任务交给PC机完成,PC机将计算结果(机器人各关节的转角)下载到以DSP芯片为核心的电机控制器,实现机器人控制眼演。本文提出将机器人运动学计算任务直接交给DSP的控制方案,利用DSP 的并行性计算特点,提高了计算速度,缩小了控制系统的体积。仿真结果表明,该方案计算精度和实时性都较好。
1 TMS320F206 DSP结构特点
TMS320F206是TI公司推出的一种DSP芯片,它是基于TMS320C5x之上的高速定点数字处理芯片,具有改进的哈佛结构并行分离的程序和数据总线、高性能CPU及高效的指令集等特点。其主要特性如下:
CPU具有32位CALU、32位累加器、16×16位并行乘法器、三个移位寄存器、八个16位辅助寄存器。
存储器具有224K字可寻址存储空间、544字片内DRAM、4K字片内SRAM或32K字片内快闪存储器。
指令速度为50ns、35ns及25ns单指令周期。
外围电路有软件可编程定时器、软件可编程等待状态发生器、片内锁相环时钟发生器、同步和异步系列串口。
2 TT-VGT机器人的位姿逆解
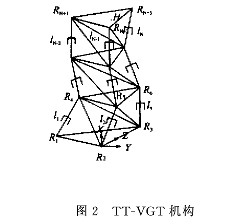
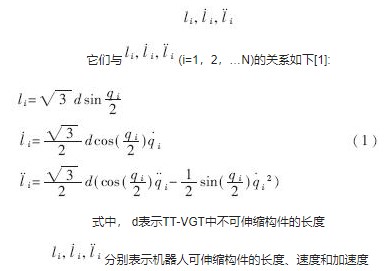
TT-VGT(Tetrahedron-Tetrahedron-Variable Geometry Truss)机器人是由多个四面体组成的变几何桁架机器人,图1所示为由N个四面体单元组成的冗余度TT-VGT机器人操作手,平面ABC为机器人的基础平台,基本单元中各杆之间由较铰连接,通过可伸缩构件li(i=1,2,…,n)的长度变化改变机构的构形。图2所示为其中的两个单元的TT-VGT机构,设平面ABC和平面BCD的夹角用中间变量qi(i=1,2,…,n)表示,qi与li(I=1,2,…,n)的关系。
设冗余度TT-VGT机器人操作手由N个伸缩关节组成,图3所示为两个单元的TT-VGT机构。设变量qi(i=1,2…N)为平面ABC和平面BCD的夹角,其相应的速度和加速度分别为
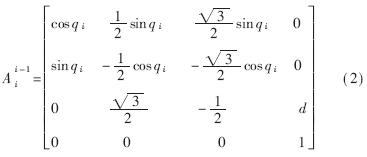
相邻两个四面体单元的坐标系的建立如图3所示。坐标系XiYiZi相对于坐标系Xi-1Yi-1Zi-1的变换矩阵可表示为:
对于机构自由度为N、任务自由度为L的冗余度TT-VGT机器人,其余四面体单元的结构与坐标系的建立与图3所示的相似。由文献[1]可知,其末端位姿X是中间变量qi(i=1,2,…,N)的函数,有:

对式(3)求导,可得如下的运动学方程式:
将式(6)离散化,可得机器人运动轨迹上第k点各关节中间变量的dqk及位置qk:

将qk代入式(1),可求得TT-VGT机器人各伸缩构件的长度li.
3 TMS320F206 DSP运动学程序设计
对于TT-VGT机器人的位姿逆解,采用DSP汇编语言设计的程序流程进行求解,如图4所示。
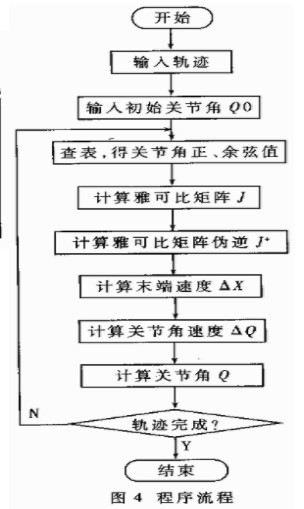
为了保证该程序的执行速度和计算精度,采取了以下算法:
(1)由于汇编语言指令系统中没有三角函数等数学函数指令,这些函数的计算只有通过级数展开算法实现,但计算量太大。考虑到三角函数的周期性,建立了一个1024点的正弦函数和余弦函数表,其分辨率完全能满足精度要求。
(2)由于TMS320F206 DSP芯片为定点运算器件,因此需要将浮点运算转换为定点运算。为了保证计算精度,将数据定标设定为可动态调节,数据表达能力为从Q13(-4~+3.9998779)到Q0(-32768~+32767)。
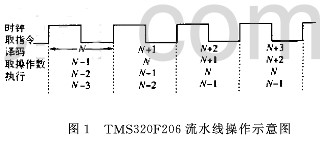
(3)采用并行指令,充分利用TMS320F206四级流水线操作,来提高程序运行速度。
如:
MAC ;乘并累加
APAC ;累加
SACH*+,3,AR2 ;将计算结果左移3位后,存于当前辅助寄存器(AR)所指的存储器单元中,并将
AR内容加1,最后,将AR2设定为当前AR.
(4)对运算过程进行优化,既要减少计算量,又要防止计算溢出;在混合运算中采用"先除后加"、"加减交叉"的方法。
(5)尽量采用移位运算代替乘除运算,以提高运行速度和计算精度。
通过以上方法,实现了机器人运动学计算的实时性和准确性。
4 仿真计算
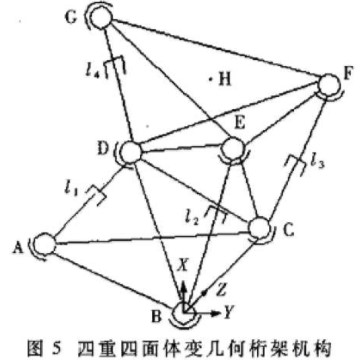
以四重四面体为例,建立如图5所示的基础坐标系XYZ,末端参考点H位于末端平台EFG的中点。设参考点H在基础坐标系中从点(0.522689,-0.818450, 0.472752)直线运动到点(0.771439,-0.965700,0.721502),只实现空间的位置运动,不实现姿态。运动的整个时间T设为5秒,运动轨迹分为等时间间隔的100个区间。设各定长构件长度为1m.
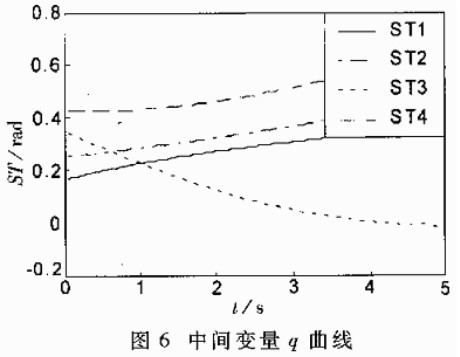
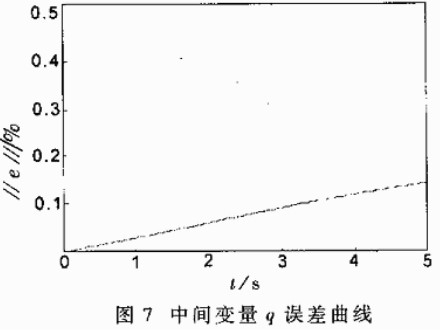
中间变量q曲线和中间变量q误差曲线如图6和图7所示。从误差曲线可看出,采用TMS329F206 DSP芯片进行的运动学计算精度较高。经过实测,该计算程序运行时间为34ms(TMS320F206芯片指令周期为25ns),可见其实时性较强。
本文提出的采用TMS320F206 DSP芯片进行冗余度TT-VGT机器人运动学计算方案,充分利用了DSP 并行特性进行机器人位姿逆解计算,在程序设计中采用了多种技巧优化计算。仿真结果表明,该方案计算误差较小,实时性强。因此,可将其应用于机器人控制系统,实现机器人计算和控制任务一体化,从而大大缩小机器人体积、降低成本、增强灵活性、具有较强的先进性和实用性。
-
求TMS320F206 DSP结构、原理及应用这本书2008-12-08 4428
-
TMS320F206的性能特点和外围电路典型设计2018-08-27 2305
-
DSP芯片TMS320F206异步串行口的应用2009-04-23 811
-
TMS320F206 DSP的以太网接口设计2009-09-09 622
-
基于TMS320F206的电网数据处理板设计2006-03-11 7145
-
TMS320F206与CPU卡通信协议的优化2009-11-26 1451
-
采用TMS320F206控制的同步调制解调器2009-12-08 1422
-
TMS320F206外围电路典型设计2009-12-24 1811
-
基于TMS320F206 DSP的图象采集卡设计2011-02-28 944
-
基于多智能体的视觉反馈冗余度机器人实时运动规划2015-11-30 501
-
机器人运动学(精品教程)2016-12-12 1019
-
超冗余度桁架机械臂的容错逆运动学仿真_赵普2017-03-19 1013
-
TMS320F206的仿真调试方案解析2017-10-27 2248
-
浅析TMS320F206 DSP的图像采集卡设计2021-05-05 2851
-
机器人运动学中的非完整约束与运动模型推导2024-01-18 4980
全部0条评论

快来发表一下你的评论吧 !
