

针对家用电器马达线圈而设计的半定子绕线机控制系统
描述
1、引言
本系统主要针对于空调等家用电器马达线圈的绕线和排线而设计。随着我国家电行业的持续发展与完善,其市场容量不断扩大,自动化程度不断提高,对家用电器马达的需求量也逐年增长。但由于市场的成熟,竞争必然越演越烈。只有那些产品质量好,规模大、成本低的厂家才能在竞争中赢得市场。而本文介绍的绕线机控制系统就是针对这一点而设计,很适合需要控制质量、扩大规模、降低成本的厂家来装配新设备或进行旧设备的改造。
2、系统介绍
系统由四个模块组成:主控电路板模块、人机接口模块、无刷电机控制模块,步进电机控制模块。系统的组成示意图见图2.1。

图2.1系统组成示意图
(1)主控电路板模块:主要用来协调其他三个模块的工作,并实现电机控制算法,人机接口的交互与用户编程的存储,系统外部事件的捕捉与管理等。
(2)人机接口:给用户提供友好的操作编程界面,和完备的系统信息。
(3)绕线电机控制模块:由一个直流无刷电机和其驱动器组成,完成绕线工作。
(4)步进电机控制模块:由两个步进电机及配套驱动器组成,共同完成换槽位与排线工艺。
3、系统硬件实现
图3.1系统硬件组成实物图
系统的硬件实现,主要目标是在保障系统稳定性的前提下,最大程度提高系统的性能和降低系统的成本。
(1)主控制板模块
主控制板的核心选用高性能的AVR贴片微控制器,不仅运算能力强大,内部定时器与中断资源丰富,自带2K的可编程EEPROM,可以胜任多个外部事件实时管理、3个电机的控制算法、人机接口交互的实现、用户程序的编辑与存储等。
另外,主控板上有两套电源系统,稳压5V给微控制器及光耦等芯片供电,24V为外部的输出信号供电,提高系统信号的驱动能力和抗干扰能力,保障系统的稳定性。
(2)人机接口模块
人机接口模块硬件,仅由一块1602字符型液晶,2*4防抖键盘电路组成,但通过紧凑的界面实现所有人机交互与用户编程功能。
(3)绕线电机控制模块
绕线电机控制模块硬件,主要由57SW系列高性能直流无刷电机及配套的WS2208驱动器组成,以及光电感应计数、测速电路组成。57SW直流无刷电机与 WS2208驱动器搭配,可以实现200-4000转/分的线性调速,稳态速度稳定,精度可达±10转/分,而成本远远低于市场上同等性能的主流产品。而计数、测速电路仅以一个光电感应开关为基础,配合一定的高效算法,便实现了快速、准确地计数、测速功能,大大降低了系统的硬件成本。
(4)步进电机控制模块
步进电机控制模块硬件,根据实际应用需求,为负载较大的分度电机选用了56混合式步进电机与容量较大的DMD403步进电机驱动器,而负载较小的排线电机则选用了混合式42电机及容量较小的DMD402步进电机驱动器。并在软件上为两个步进电机设计了S型加减速算法、间隙补偿算法等,让系统以最简单的硬件配备,减少运行振动,保证机器性能和加工效果。
4、软件系统设计
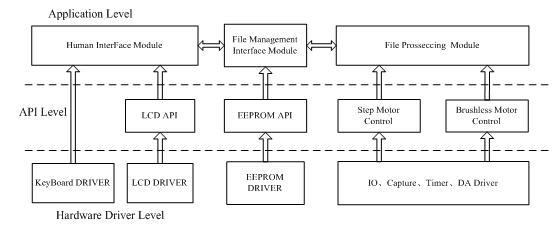
图4.1 系统软件框图
由图可知,系统软件由三个模块组成,各模块又分三层来实现和管理。
(1) 人机接口模块
此模块通过键盘与LCD液晶的驱动,来实现与管理一系列相关的用户界面。模块利用面向对象的思想,把各个界面当作一个界面对象来管理,这样提高了代码的重复利用率,大大节约了代码空间。然后在此基础上,为各个界面对象建立了状态机管理机制,这样增强了每个界面对象的功能,又简化了各个界面间的跳转操作,并让模块的扩展能力得到加强。
(2) 文件管理接口模块
文件管理模块,在有限的EEPROM空间,建立了29个定长文件的管理体系。主要记录文件的参数,以及一些加工的工艺细节信息。
(3) 文件加工模块
文件加工模块,是本系统软件的核心模块。在该模块的API层,①实现了两个步进电机的S型加减速算法,间隙、角度补偿算法,减少了机械运行时的振动和冲击,并达到了至少0.5o的精度(精度视具体精度而定,机械性能良好时,可达0.1o);②实现了步进电机二次复位的算法,保证了系统的复位精度和稳定性;③为绕线电机实现了S型的无级调速算法,使得绕线电机可以在2s内平稳升速到3000转/分,并基本无过冲,保证了效率和绕线质量。④通过主控板的捕捉中断功能,并辅以定时器建立的时间坐标,实现实时绕线计算和测速功能。
在本模块的应用层,根据加工文件建立了状态机来管理和实现绕线加工过程的所有工艺要求。使用状态机的优点在于①对于加工过程复杂的工艺,状态机流程清晰,便于管理;②转态机好的扩展性,可以帮助系统适应更多应用场合的工艺需求。
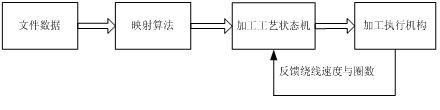
图4.2 文件加工实现示意图
5. 结束语
本系统依据空调室内机等家用电机的半定子量身定制。采用先进运动控制算法控制2路步进电机,1路无刷电机;实现了友好的人机接口界面与简易的编程方式;实时高效的绕线计数与测速功能。整个系统在设计和实现上,很好的把高性能和低成本结合在一起,具备很强的市场竞争能力,并已成功应用于浙江卧龙家用电机有限公司。
-
基于单片机的家用电器远程控制2023-01-04 1104
-
线圈绕线机开源分享2022-11-30 1025
-
如何匹配好马达绕线机的速度与张力2022-11-24 2041
-
马达绕线机排线部件常见故障有哪些?2022-11-19 2035
-
【电路设计】基于单片机家用电器远程控制系统设计2021-03-29 1414
-
龙岗家用电器模胚选购是需注意什么?2019-09-10 992
-
嵌入式系统和智能家用电器2019-07-03 4456
-
【单片机】家用电器单片机控制系统的制作与检修2019-01-05 2490
-
家用电器单片机控制系统的制作与检修2017-09-21 917
-
基于蓝牙的家用电器智能控制系统2014-12-31 3954
-
基于PSTN的家用电器远程控制系统设计资料2012-08-20 2046
-
基于单片机的家用电器远程电话控制系统的实现2010-09-28 907
-
基于PSTN设计的家用电器远程控制系统2010-05-28 1734
-
数控细微线绕线机控制系统的设计与实现2009-07-06 639
全部0条评论

快来发表一下你的评论吧 !
