

以DSP TMS320F2812为核心的ATV-ATT中控系统设计
描述
为有效应对突发性、规模性的恐怖暴力事件,非致命性防暴武器的研制越来越受到各国的重视,研制以高机动性的ATV作为武器平台的防暴武器系统对提高反恐作战能力具有重大意义,而现代化的控制系统又使得整个武器系统更加可控化,智能化。因此,这里提出一种基于DSP的ATV-ATT中控系统设计方案。该设计是以DSP TMS320F2812作为控制核心,通过手柄控制武器装置的俯仰运动和回转运动,以及通过按键方式控制其徽动、测距、自动瞄准和发射模式设定等前期准备工作,当操作人员按下射击按钮后,武器控制系统根据所设定条件自动形成允许发射信号,随后武器就被发射或投放出去。同时系统带有自检及存弹检测功能。
1 系统设计方案
全地形反恐防暴武器系统ATV-ATT中控系统的功能主要是完成对武器系统运动、测距、瞄准、发射等一系列控制,如图1所示,该系统包括3大模块:运动模块、按键模块和通信模块。
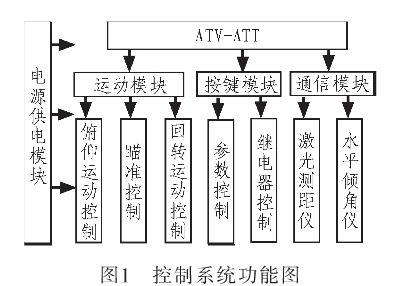
图1:控制系统功能图
1.1 运动控翻模块
在控制系统中,通过手柄操纵杆控制发射装置的俯仰运动和回转运动。手柄可以等效成两个独立的电位器,模拟电压的范围在0~3 V,符合A/D转换模块的采集电压范围,经过DSP(TMS320F2812)的A/D转换和事件管理器(EV)的PWM波形生成,分别输出两路PWM波形控制步进电机(90BYG3502)转速,而方向则通过DSP强大的IO端口输出高低电平信号来控制,此信号为高电平时电机为顺时针旋转,低电平时则为反方向逆时针旋转。但由于DSP的输出信号的电压幅值在0~3.3 V之间,不能满足步进电机驱动器(MSa-3H090M)的信号幅值范围,因此将这4路信号经过升压驱动电路后传送到电机驱动器,进而实现对电机的控制。
同时系统中还有瞄准功能,激光测距仪与视频成像仪的光轴共轴,当视频成像仪在屏幕中显示的瞄准点指向目标时,按下测距按键即可触发激光测距仪测距信号,DSP根据当前状态下水平倾角仪两垂直轴与水平面的夹角,经过特定的算法,计算出发射状态下两方向位移,DSP给出电机驱动信号驱动电机,并实时比对倾角仪的读数,达到计算值允许的阈值范围内,即认为瞄准完成可进行发射。
DSP TMS320F2812是一种低功耗的32位定点数字信号处理器。除具有一般DSP的优点外,它还采用高性能静态CMOS技术,电压从5 V降为3.3 V,内核电压降为1.8 V,减少了功耗。指令执行速度最高150 MHz,几乎所有指令都可在6.67 ns的单周期内完成。该芯片还具有大量外设资源,如A/D转换、定时器、各种串口(同步和异步),看门狗、CAN总线/PWM发生器、数字IO脚等。因此选用DSP TMS320F2812作为系统控制器。
1.2 按键模块
参数控制包括微动按键的控制和2种发射模式按键控制,按下测距按键可以改变DSP中脉冲频率,利用手柄对发射装置进行细微控制。发射模式按键控制DSP相应参数,使武器按照既定发射模式发射。发火机构通过继电器来控制,本设计中采用GTJ8-8A型固态继电器,发射按键经DSP的通用IO端口向继电器提供控制信号,48 V作为激发电压进行点火,从而实现发射过程。
1.3 通信模块
TMS320F2812器件包含了串行通信接口SCI模块。该SCI模块带有与RS-232标准一致的异步串口,使得TMS320F2812可以方便地与其他使用标准格式的异步外设进行数据通信。在本设计中通信子系统就是通过标准RS-232串口完成DSP与水平倾角仪,激光测距仪和视频成像仪之间的数据通信控制。
2 系统硬件设计
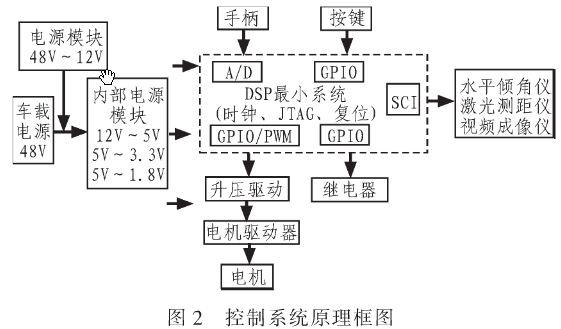
图2:控制系统原理图
图2为该系统设计的原理框图,这里主要给出升压驱动电路和电源电路的设计。
升压驱动电路采用三极管放大电路的基本原理:集电极电流受基极电流的控制,并且基极电流很小的变化,会引起集电极电流很大的变化,且变化满足一定的比例关系。这里选用NPN型硅三极管,将从DSP输出的3.3 V的两路方向信号和两路脉冲信号分别升压至5 V,从而驱动电机驱动器,如图3所示。
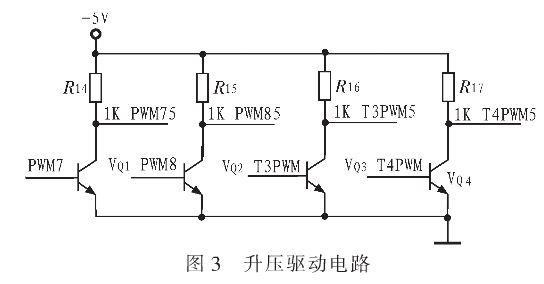
图3:升压驱动电路
电源是整个系统的能源中心,系统电源电路的性能在很大程度上影响到DSP系统的稳定性。直流电源的输入为48V的车载电瓶,采用SPD75 -XXS12型宽电压恒流稳压电源模块,将48 V电压转为恒定的12 V直流电压,进而为中控板、水平倾角仪和激光测距仪等供电。
中控板12 V直流输入,采用12S05转换为+5 v直流电源。而内部各器件的工作电源除+5 V外还有数字+3.3V、模拟+3.3V以及数字+1.8V。为此,专门设计了中控板内部电源模块,用以实现将+5 V的电压转换为各器件工作所需的几种电压。这里采用了两片LMlll7将+5 V分别转换为+3.3 V和+1.8 V的输出电压。为了避免数字电源对模拟电源的噪声干扰,通过电感将二者隔离,如图4所示。
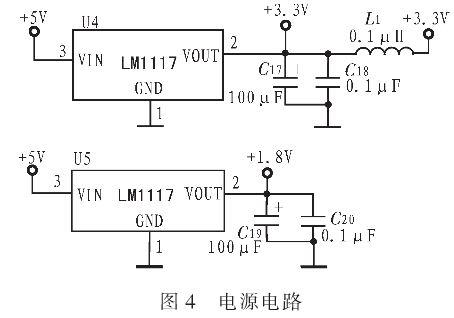
图4:电源电路图
3 系统软件设计
控制系统的软件采用C语言编写,软件主要由主程序、串口中断子程序和A/D转换中断子程序组成。主程序用于TMS320F2812型DSP的初始化、控制指令与参数的转化与输入,步进电机驱动信号的生成。串口中断子程序用于实现接收来自水平倾角仪和激光测距仪的信息及向其发出控制指令。A/D转换中断子程序用于实现接收手柄电位器反馈来的电压变化并将其转化为数值。软件执行流程如图5所示。
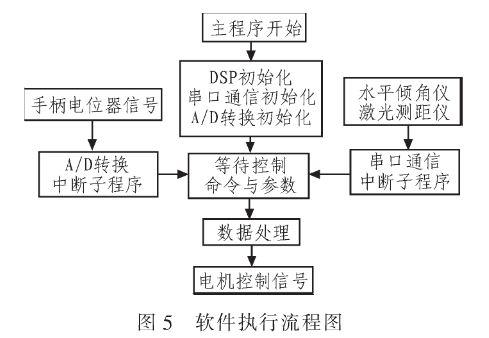
图5:软件执行流程图
4 系统调试结果
将元器件焊接在电路板上,检查无虚焊漏焊的焊点,测量电源是否有焊接短路现象,确保板子的电源供电正常,各个模块间的连线正确,如图6所示。
图6:电路板实物图
图7所示为烧写好程序的系统连接图,经过调试,程序运行完好,武器系统可以实现90°回转方向运动,60°内高低方向运动以及通过按键方式控制其微动、激光测距、自动瞄准和发射模式设定,自检及存弹检测等一系列的功能要求。
图7:系统硬件连接图
5 结束语
本文对某ATV-ATT车载武器控制系统的设计方案进行了阐述。按照系统功能不同,分别介绍各个模块电路。根据硬件设计的基本原则,选择了合适的器件和参考电路,然后对硬件电路进行了分析和设计,解决了升压驱动,电源供电等难题,最后通过调试安装,系统的实际运行,验证了本设计运行稳定,达到了应用目标。
-
基于TMS320F2812的光电色选系统介绍2019-07-16 2266
-
定点DSP芯片TMS320F2812实现快速算法应用2008-10-30 844
-
TMS320F2812原理与开发2009-01-06 1353
-
基于TMS320F2812的控制系统设计2010-07-20 615
-
基于TMS320F2812的车辆动态称重系统设计2010-07-27 592
-
基于CPLD的TMS320F2812硬件平台设计2010-08-06 698
-
基于DSP的ATV-ATT中控系统设计2010-11-22 728
-
TMS320F2812程序的远程升级方法2009-11-20 1034
-
TMS320F2812原理图2012-02-17 4636
-
基于TMS320F2812的SVPWM变频调速系统2016-04-13 726
-
基于TMS320F2812的SVPWM控制2016-04-18 782
-
TMS320F28122017-03-04 1171
-
ATV-ATT中控系统设计方案分析2017-10-31 1042
-
采用TMS320C6713B与TMS320F2812实现大功率变流器通用控制平台的设计2019-02-06 4759
-
TMS320F2812系列DSP的中文数据手册2020-08-13 2969
全部0条评论

快来发表一下你的评论吧 !
