

模糊pid控制器在选矿工业控制中的应用
描述
一、模糊控制基本原理
1.模糊控制器
模糊控制(Fuzzy Control-FC)又称为模糊逻辑语言变量控制,简称为模糊控制或称为模糊逻辑控制(FLC),是以模糊集合论,模糊语言变量及模糊逻辑推理为基础的计算机智能控制。模糊控制的核心部分为模糊控制器,模糊控制器的控制规则由计算机程序实现。图1为模糊控制原理图。
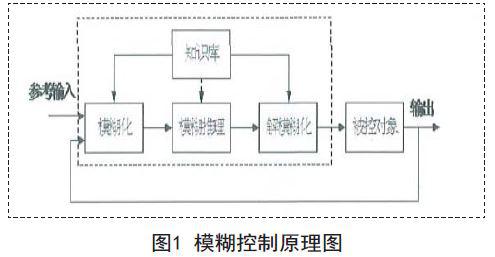
模糊控制器可分为三个部分组成:
(1)模糊化接口(Fuzzy interface)
模糊控制器的输入必须通过模糊化才能用于控制输出的要求,因此它实际上是模糊控制器的输入接口。它的作用是将真实的确定量输入转换为一个模糊矢量,如下所示:
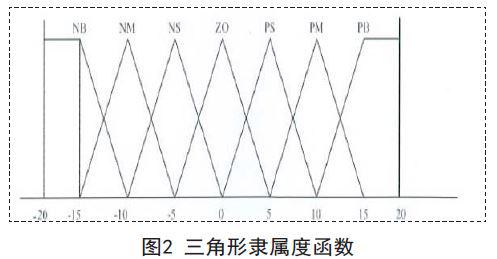
e=负大,负中,负小,零,正小,正中,正大。
三角形隶属度函数表示如图2 所示,N B (负大)、N M (负中)、N S (负小)、Z 0 (零)、P S (正小)、P M (正中)、P B (正大)。
(2)知识库(Knowledge Base)
知识库包含数据库和规则库A.数据库(Data Base)
数据库所存放的是所有输入,输出变量的全部模糊子集的隶属度矢量值,在规则推理的模糊关系方程求解过程中,向推理机提供数据。
B.规则库(Rule Base)
模糊控制器的规则是基于专家知识或手动操作员长期经验的积累,是按人的直觉推理的一种语言形式。模糊规则通常由一系列的关系词连接而成,如if-then,else,also,end,or等。
(3)推理与解模糊接口(Interence andDefuzzy-interface)
推理是模糊控制器中,根据输入模糊量,由模糊控制规则完成模糊推理来求解模糊关系方程,并获得模糊控制量的功能部分。推理结果的获得,表示模糊控制的规则推理功能已经完成。但是,获得的结果仍是一个模糊矢量,不能直接用来作为控制量,要作进一步转换,求解清晰的控制量输出,即为解模糊,通常把输出端具有转换功能作用的部分称为解模糊接口。
解模糊的方法常用的有:重心法,最大隶属度法,系数加权平均法,中位数法等。
A.重心法,也称力矩法。它取推理结论模糊集合隶属函数曲线与横坐标轴所围成面积的重心作为代表点。重心法的实质为加权平均法,权值为推理结论模糊集合中各元素的隶属度。
B.最大隶属度法,最大隶属度法时指在推理结论的模糊集合中选取隶属度最大的元素作为精确控制量的方法。
C.系数加权平均法,系数加权平均法是指输出量模糊集合中各元素进行加权平均后输出值作为输出执行量,权系数的选择要根据实际情况确定,不同的权系数决定由不同的响应特性。
D .隶属度限幅元素平均法,隶属度限幅元素平均法是用所确定的隶属度度值对推理结论模糊集合隶属函数曲线进行切割,再对切割后等于该隶属度的所有元素进行平均,用这个平均值作为输出执行量的方法。
E.中位数法,中位数法是全面考虑推理结论模糊集合各部分信息作用的一种方法,即把隶属度函数曲线与横坐标所围成的面积分成两部分,在两部分相等的条件下,将两部分分界点对应的论域元素作为判定结果,这种方法可以充分地利用输出模糊集合所包含的信息。
2.模糊控制器的结构
在确定性控制系统中,根据输入变量和输出变量的个数,可以分为单变量控制系统和多变量控制系统,在模糊控制系统中,也可以类似的划分。
(1)单变量模糊控制器(Single VariableFuzzy Controller)
在单变量控制系统中,输入变量的个数定义为模糊控制器的维数,一般包括一维模糊控制器,二维模糊控制器,三维模糊控制器等,维数越多,控制系统控制精度也越高。但是维数选择太高,模糊控制规律就过于复杂,基于模糊合成推理的控制算法的计算机实现就越困难,这也是大家设计模糊控制器时,多采用二维控制器的原因。
(2)多变量模糊控制器(Multiple VariableFuzzy Controller)
多变量模糊控制器,具有多变量结构。直接设计一个多变量模糊控制器是相当困难的,可利用模糊控制器本身的解耦特点,通过模糊关系方程分解,在控制器结构上实现解耦,即将一个多输入多输出的模糊控制器,分解成若干个多输入单输出模糊控制器,采用单变量模糊控制器方法设计。
二、模糊pid控制
在一般的模糊控制系统中,考虑到模糊控制器实现的简易性和快速性,采用单变量二维模糊控制的结构形式,方便计算。用浮选液位值和输入值的差值E,和它的差值变化EC为输入语句变量,因此它具有类似于常规pd控制的作用,采用该类模糊控制器的系统可能获得良好的动态响应特性,而静态性能不能令人满意。由线性控制理论可知,积分控制作用能消除稳态误差,但动态响应慢,比例控制作用动态响应快,而比例积分控制作用既能获得较高的稳态精度,又能具有较高的动态响应。因此,把PI控制策略引入Fuzzy控制器,构成Fuzzy-PI,或说是Fuzzy-PID复合控制,是改善模糊控制器稳态性能的一种途径。
目前采用这种复合控制器有多种控制形式,其中包括,具有积分项的模糊控制器,混合型模糊PID控制器,误差e模糊积分的PID模糊控制器,Fuzzy-PID开关切换控制,Smith-Fuzzy控制器,设定值迁移模糊PID控制器。
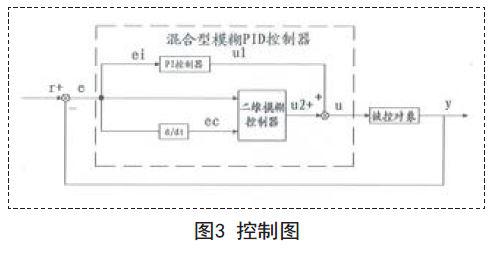
采用混合型模糊PID算法,将常规液位控制PID和二维液位模糊器相并联而成。常规PI控制器输出为u1和二维模糊控制器u2相叠加,作为混合型模糊PID控制器的总输出。
即:U=ul+u2
控制图如图3所示。
三、总结
PID控制器和模糊控制器的有机结合扬长避短,既保证了系统的稳态性能,又使得系统具有满意的动态性能,尤其适合特定复杂系统的各项指标要求,对生产需要稳定的工艺参数有着重大的意义。
本系统应用在选矿工业控制过程中获得了良好的控制效果。
-
简化的模糊PID控制器研究2009-03-16 791
-
一种新型的模糊PID控制器介绍2009-04-10 591
-
模糊PID控制器在恒压供水系统中的应用2009-05-26 902
-
模糊免疫PID 控制在铁芯卷绕纠偏中的应用2009-06-04 869
-
模糊自整定PID 控制器在再热汽温控制中的应用研究2009-06-11 590
-
模糊自适应PID控制器在张力控制中的应用2009-07-09 749
-
在线模糊整定PID控制器在火灾炉温度控制中的应用2009-09-12 591
-
模糊自适应PID在机组协调控制中的应用2010-01-11 875
-
参数自适应模糊PID控制器的设计2009-02-27 2784
-
高精度模糊PID控制器在温度控制中的应用2011-06-17 1076
-
一种简化PID模糊控制器的研究与设计2013-02-21 927
-
模糊自适应PID控制器设计2016-01-18 834
-
基于模糊PID控制的导弹舵机伺服控制器2016-04-05 1323
-
PID控制器的模糊增益调整及在电阻炉温控制系统中的应用_王海峰2016-06-06 1073
-
PID控制器在工业自动化中的应用2024-06-05 4741
全部0条评论

快来发表一下你的评论吧 !
