

基于半导体泵浦固体绿激光器的目标测距、测厚的实验研究
描述
无配合目标的激光测距、测厚技术在工业生产中有着广泛的应用,如钢铁厂所用的价值数百万元的“转炉”测厚仪,就必须采用无配合目标的测距、测厚技术。可见光半导体激光管具有体积小、易调制、成本低等特点,其应用日趋广泛。本文介绍的实验系统采用波长为532nm、功率为20mW的半导体泵浦固体绿激光器作光源,光强调制频率为15MHz,避免了高温红色炉衬的背景干扰。本系统没有反射器作配合目标,接收到的光信号功率大约在nW量级;采用高频响应的绿敏光电倍增管作为探测器,并在其前方安装了望远镜系统和滤光片,提高了接收灵敏度和信噪比,实现了无配合目标的测距。
1 系统组成
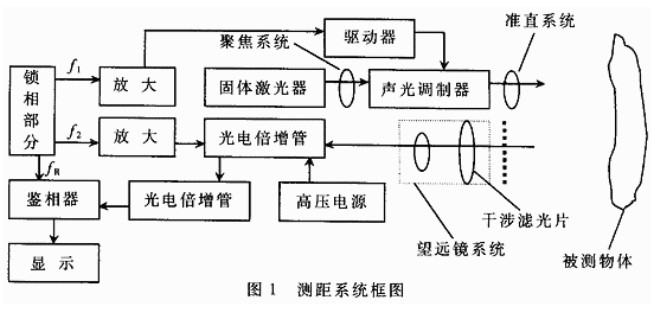
本系统共分四个部分:锁相稳频部分、激光发射调制部分、光电接收检测部分和鉴相显示部分。其系统框图如图1所示。
1.1 锁相稳频部分
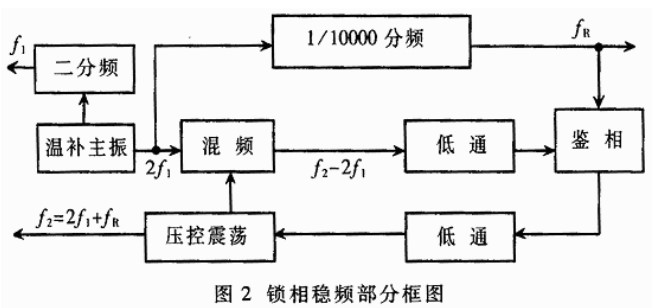
锁相稳频部分提供整个系统的主振(f1=7.5MHz)和本振(f2=15.0015MHz)。主振由在声光调制器作用下倍频,然后与本振进行差频,得到测量信号,为fm=f2-2f1=1.5kHz。锁相稳频部分框图如图2所示。将稳定度好、频率漂移小于5×10-6、频率为15MHz的温度补偿晶体振荡器二分频后作为主振,将15MHz的温补晶振10000次分频后,得参考信号fR=1.5kHz。这样,当环路稳定时,有2f1=f2-fR,本振f2送往光电倍增管,主振f1送往声光调制器,fR作为参考信号,送往鉴相器。本系统针对炉衬测厚仪而设计,要求的测量范围较短,因此只需一种测尺频率即可。锁相技术的采用能保证本振的稳定度达到5×10-6,更重要的是能保证本振与主振的差频非常稳定,因而大大降低了鉴相误差,提高了系统精度。
1.2 激光发射调制
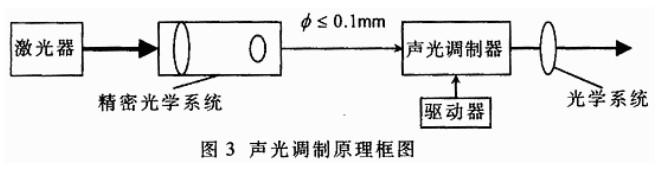
本系统采用半导体泵浦固体激光器作为激光源,它的光束直径是1.5mm,发散角为2mrad,输出的是线偏振光。用声光调制器对激光器发出的激光束进行光强调制,可得到调制频率为15MHz的调制光波。欲把激光的光强调制到调制频率为15MHz的调制光波,要求通过声光调制器晶体的激光束直径小于0.1mm。由于固体激光器光源的光束直径较大,必须设计一个光学系统将激光束聚焦为发散角小于7mrad和聚焦直径小于0.1mm的会聚激光束,以保证通过声光调制器晶体的激光部分的光束直径小于0.1mm;然后再用一个光学系统将调制光束在一定测试范围内会聚成直径不大于5mm的光班。声光调制原理框图如图3所示。
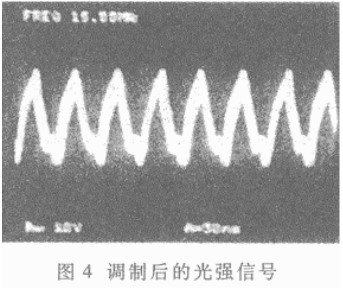
实验中需调整声光调制器的位置以获得最大衍射效率。调整步骤如下:(1)旋转声光调制器使得激光入射角大约为22mrad(布拉格角);(2)调整声光调制器的高度使得激光束打在声光调制器活动孔径的中心;(3)使激光束与声光调制器的活动孔径平行;(4)使激光束的偏振方向与声光调制器的基面垂直;(5)保证激光束的会聚点在声光调制器的晶体中心。按照上述步骤进行调试,用光功率计探测从声光调制器射出的调制激光束。为获得满意的调制信号波形,慢慢调整RF驱动器的射频功率,将射频功率保持在衍射光强最大的地方,即锁相部分输出的模拟信号保持在某一幅值即。激光束调制后的光强信号如图4所示。
1.3 光电检测部分
光电检测部分由望远镜系统、光电倍增管(PMT)、高压电源、选频放大器、干涉滤光片构成(见图1)。无配合目标的检测是对被测物本身散射回来的非常微弱的光信号进行检测,探测器接收到的光功率的大小可用式(1)进行估算。本系统探测器接收到的功率为:
上式中p0为点光源的功率,θ为望远镜系统接收的立体角。
由此可见探测器接收到的光功率是极微弱的,光电倍增管是首选的探测器。由于散射回来的光能量还与被测物表面的光滑程度以及入射光束的方向有关,因此具有雪崩效应的雪崩光敏二极管也可用作探测器。本系统选用具有高频响应的绿敏光电倍增管作为探测器,并在其前端安装了望远镜系统。利用光电倍增管可以在阴极混频的特点,将本振信号经高频放大后与光电倍增管接收到的光电信号在阴极进行混频,得到1.5kHz的差频信号,经信号处理后送往鉴相器。
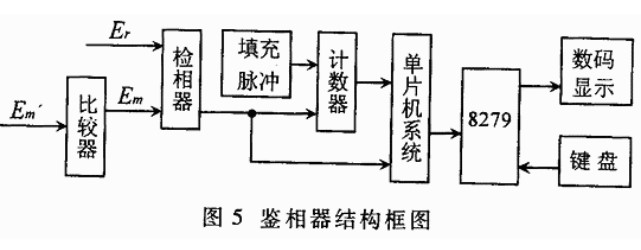
1.4 鉴相部分
鉴相部分采用当前测距领域广泛使用的自动数字测相技术,由比较器、检相器、计数器以及89C51单片机系统等构成,其结构框图如图5所示。Er为1.5kHz的参考方波信号;Em'为同频率的正弦测量信号,它必须由过零比较器转换成方波信号Em后,才能进入检相器与参考信号比相;检相器由两片JK触发器组成,检相器检出参考信号Er与测量信号Em的相位差,送往计数器;单片机系统控制采集相位差信号的次数N(次数N相当于闸门开启时间),计数器计出N次相位差填充脉冲数的总和;计算机系统计算出单次相位差的平均填充脉冲数,随后折算成距离并显示结果。
2 精度分析
相位式光波测距仪的测距误差计算公式为:
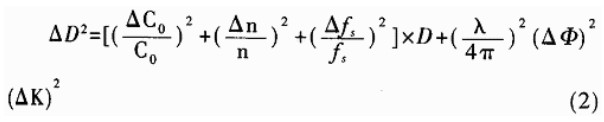
式中,C0为真空光速,D为测量距离,n为标准大气条件下大气的群折射率,ΔΦ为测相误差ΔK为仪器的常数误差,fs为测尺频率。从上式可知,测距误差分为与距离成比例的误差和与距离无关的误差两部分。根据炉衬测厚仪的特点,测量的距离在10m左右,且晶振的稳定度小于5×10-6,所以第一项的误差在本系统中的影响很小,主要是第二项的测相误差和仪器常数误差影响着测距精度。测相误差包括数字相位计原理误差、照准误差、幅相误差以及由信噪比决定的偶然误差。在测距距离较短、激光束准直性较好时,可认为光斑处的波面相位相同,照准误差可忽略。系统中采用了锁相频率合成技术来稳定差频,差频不稳定引起的测相误差可忽略,因此系统中应主要考虑幅相误差、仪器常数误差与周期误差的影响。
3 实验与结论
利用本系统实现了5~10m的黑色物体的漫反射光的检测,从放大器后检测到的信号波形如图6所示。其频率为1.5kHz,幅度为5V左右,可见这就是解调出的光信号,并且灵敏度极高。
图6、图7和图8
图7为进入检相器的Er和Em信号的示波器双踪显示,上面的方波是参考信号Er,下面的是测量信号Em。图8为检相器的检相结果,Er和Em的相位差对应脉冲宽度,相位差越大,脉冲的宽度越宽。对比图6、图7可见,检相器的检相结果是正确的。此信号控制计数器的计数,单片机采集计数器的计数结果,经处理后显示该距离所对应的脉冲数。
本实验系统中还有一些技术问题尚未彻底解决,例如消除光电倍增管的高频感应、接收光斑的落点位置及接收光强大小的控制等问题,这些均影响测量的精度,有待在实验中进一步解决。
-
半导体激光器发光原理及工作原理解析2020-08-11 6916
-
半导体泵浦激光器有什么优点?2020-03-10 3611
-
半导体泵浦激光打标机的控制原理是什么?2019-10-16 2956
-
半导体泵浦固体激光器的分类_半导体泵浦固体激光器的特性2019-07-08 8431
-
半导体激光器的发展2019-05-13 5851
-
半导体激光器产业的发展情况和相关应用2019-04-01 5073
-
大功率半导体激光器驱动电源的设计2018-08-13 4907
-
半导体激光器工作原理及主要参数2016-01-14 6030
-
二极管泵浦的高重频脉冲固体激光器研究2010-11-28 724
-
工业用固体激光器的现状2010-11-23 515
-
AlGaInAs半导体饱和吸收体调Q特性的理论与实验研究2010-04-26 2035
-
大功率半导体激光器2009-12-08 4926
-
半导体泵浦固体激光陀螺的研究进展2009-07-18 905
全部0条评论

快来发表一下你的评论吧 !
