

基于DSP实现静止无功发生器控制器和电流间接控制方法的研究
描述
本文介绍了基于数字信号处理(DSP)设计的静止无功发生器控制器的结构、功能、特点,具体分析了电流间接控制方法,详细介绍了控制方法及其编程实现,并通过仿真证明了电流间接控制方法的有效性。
1、概述
随着柔性交流输电技术的提出和发展,静止无功发生器(Static Synchronous Compensator,简称STATCOM)已成为近年来国内外研究的热点。STATCOM的基本原理是将自换相桥式电路通过电阻和电抗器或者直接并联在电网上,根据输入系统的无功功率和有功功率的指令,适当地调节桥式电路交流侧输出电压的幅值和相位,或者直接控制其交流侧电流就可以使该电路吸收或者发出满足系统所要求的无功电流,实现动态无功补偿的目的。稳态时STATCOM输出的有功功率和无功功率分别是:

其中VS是系统电压, R是装置的等效电阻,δ是系统电压和装置输出电压之间的相位差。
近年来对STATCOM的相关技术研究主要集中在主电路、新元件、保护和监测、控制方法上。尤其是控制方法,是STATCOM研究中的重中之重。根据补偿要实现的功能和应用场合,目前STATCOM的控制主要从控制策略和外闭环的反馈控制量的选取两方面来考虑,可以分为电流间接控制和电流直接控制。所谓间接控制,就是将STATCOM当作交流电源来看待,通过对STATCOM装置中逆变器所产生的交流电压基波的相位和幅值的控制,来间接控制STATCOM交流侧电流;而直接控制[3],就是对电流波形瞬时值进行反馈控制,STATCOM可看作为一个受控电流源。本文设计了一种适合较大容量STATCOM控制采用的电流间接控制方法,通过仿真试验证明这种方法是切实可行的。
2、STATCOM控制系统的结构与基本功能
在静止无功发生器中,控制器(包括脉冲发生器)是STATCOM的重要组成部分,也是其核心部件之一,它根据用户设定的参考值和系统的运行状态来确定STATCOM的无功
基金项目:陕西省教育厅科研计划项目(03JK123)
电流输出。其主要是通过产生控制驱动开关器件的脉冲来控制STATCOM的各种行为,完成STATCOM所需完成的任务。STATCOM装置原理框图如图1所示。
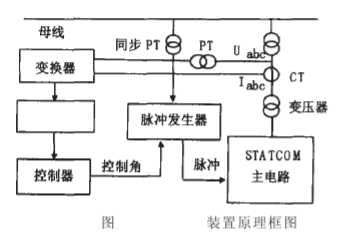
这个STATCOM控制系统采用双DSP结构,其中一个DSP处理器用来完成数据处理、控制方法的实现,是主处理器;另一个DSP处理器用来产生高精度脉冲。图中PT是电压互感器,CT是电流互感器,用来测量STATCOM输出端的三相电压和三相电流信号,Uabc、Iabc分别是系统三相电压和电流,该控制器具有产生同步脉冲、产生触发脉冲、控制STATCOM行为和运行控制算法等功能。
3、STATCOM主控制器控制算法的实现
设计控制器时,除了脉冲发生器的设计以外,控制器的软硬件设计主要集中在采集系统有关的电压和电流变量以及实现控制算法上,即集中在主控制器的设计上。STATCOM控制环节计算量大,精度要求高,所以主控制器和脉冲发生器的性能及所采用的控制方案对装置的补偿效果起决定性的作用,从而影响用户端电压的质量。
3.1 电流间接控制算法
电流间接控制算法分为单δ控制和δ与θ(逆变器导通角)配合控制。δ与θ配合控制方法引入了STATCOM吸收的无功和有功电流的反馈控制,其中包含了许多系统参数。而电力系统的参数具有极大的不确定性,所以要求STATCOM控制器必须有很强的自适应性,实现难度很大。单δ控制主要有传统PI控制和逆系统的PI控制。逆系统的PI控制具有比传统PI控制更快的响应速度,所以对间接控制的研究将主要针对此种控制方法。本文采用单δ控制中的逆系统PI控制作为主要控制方法,控制方法框图如图2所示。
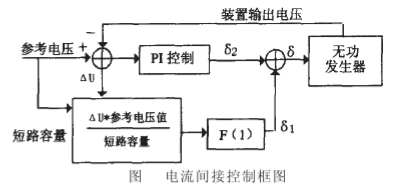
上图的主要思路是对STATCOM的无功功率采用逆系统非线性的PI控制,图中的F(1)即为(2)式,通过计算获得δ1,ΔU是系统参考电压和装置输出电压的差值。正是δ2对δ1的动态调节作用,使逆系统PI控制才比传统PI控制具有更快的响应速度。
3.2 主处理器的选取
STATCOM控制器有两个基本的特点,一是响应速度快;二是待处理变量多,在检测控制中要进行大量的微分、积分、乘方、三角函数等运算。故在采用数字控制系统时,若以普通微处理器(如MCS51、96)为CPU,则由于其本身指令系统的局限性,所需指令数目多,指令周期长,因此难以保证控制装置的实时性。而采用一种高性能的数字信号处理器DSP作为CPU时,则使兼顾满足STATCOM控制器的精确性和实时性要求成为可能。
考虑到系统的要求和实际情况,本文选TMS320F240为主处理器,这是由于DSP快速的运算能力(TMS320F240指令执行时间为50ns),以及其强大的片内外功能(3个通用定时器,单比较单元可产生3路PWM波,全比较单元可产生6路PWM波),所以采用TMS320F240系列的DSP芯片来实现控制功能,可以提高运算速度,也可以达到很好的控制效果。
3.3 测量采样系统
控制器的测量系统是由PT、CT和A/D转换模块组成,PT、CT用来测量STATCOM输出端的三相电压和三相电流信号,这些模拟量信号经A/D转换器进行模/数转换后进入控制器,控制器利用所测得的信号瞬时值,经过适当的变换后求出瞬时无功和瞬时电压矢量的“有效值”,并以此为依据对STATCOM进行控制。电压量的采集主要利用TMS320F240自带的A/D转换器完成。TMS320F240内部集成了2个10位的A/D转换器,共16路模拟通道,转换结果保存到两级先进先出的(FIFO)寄存器中。可以同时进行采样和转换2路模拟输入(每个ADC单元各一个)。本系统取采样周期为500μs,转换通道选择通道7和通道15,转换结束后,进行数据处理。
3.4 软件流程
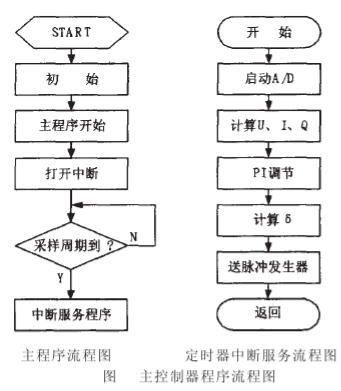
DSP主控制器的软件实际上是一个控制器下位机软件,主要负责各个参量的采集和各种控制算法的具体实现。程序运行开始打开定时器1中断和外部中断INT0,外部中断用于和上位机通信,DSP控制器在外部中断服务子程序中完成上位机的各种指令,在定时中断服务子程序中完成控制算法的实现。由于采样周期设为 500μs,即一个周期采样40个点。所以定时器1每隔500μs触发一次中断,在中断服务程序中DSP采集当前系统参量并计算瞬时电压的量,然后根据上位机所发出的指令选择控制方式和控制算法以便计算控制量δ,最后将计算结果通过双口RAM送到脉冲发生器。由于DSP的运算速度很快,所以完全可以在500μs的周期内实现采样、读取数据及实现各种复杂的控制算法并查表计算出STATCOM逆变器输出电压与系统电压间的相位差δ,实际的程序编制运行中已经证明了这一点。图3是主控制器主程序流程图和定时器中断服务程序流程图。
4 、控制算法仿真结果
本次仿真软件用MATLAB6.1 PSB(电源系统模块)控制工具箱,将含有采用电流间接控制方法的STATCOM接入一个单机无穷大系统,假设系统其中的一条线路在0.3秒发生瞬时两相对地短路,在0.45秒切除故障线路,记录发电机机端电压、功角的动态仿真特性曲线,无STATCOM的系统和装有STATCOM的系统的仿真结果对比分别如图4、图5所示。
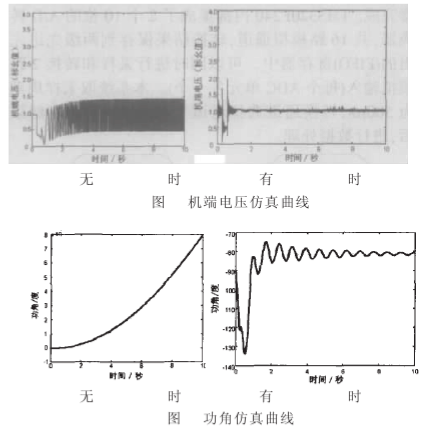
从图4、图5可以看出,在系统发生两相短路瞬间,系统很快失去同步,投入STATCOM后,发现在故障发生过程中,发电机机端电压、功角曲线发生波动,但很快趋于稳定,说明了采用电流间接控制算法的STATCOM在维持系统电压稳定和提高电力系统的暂态稳定极限上发挥了很大的作用。
5、 结论
本文作者的创新点在于利用了数字信号处理运算速度快、计算精度高、定时准确的优点,设计了基于TMS320F240的STATCOM主控制器,详细介绍了电流间接控制方法的特点、结构以及控制方法的编程实现。数字仿真结果表明,采用电流间接控制方法的STATCOM在系统受到大干扰后对系统的调节作用是很明显的,具有较高的使用价值,值得在工业控制中推广。
责任编辑:gt
-
静止无功发生器的原理是什么?2019-10-10 1798
-
静止无功发生器的工作原理2021-05-07 3213
-
基于DSP控制的新型静止无功补偿控制器的设计2009-03-15 1545
-
STATCOM的电流间接控制方法设计与实现2009-09-11 676
-
基于静止无功发生器的三态滞环控制策略研究2010-08-19 896
-
链式多电平静止无功发生器的研究2011-02-12 1381
-
如何使用FPGA实现静止补偿的PWM脉冲发生器设计2020-01-07 1355
-
如何设计实现直接电流控制的静止同步补偿器2020-01-15 1573
-
使用空间电压矢量法实现三电平静止无功发生器设计论文说明2020-04-30 1555
-
基于DSP的静止无功发生器的控制方法2021-05-10 1256
-
有源静止无功发生器SVG的竞争优势2021-12-09 3434
-
增强型静止无功发生器ASVG的原理介绍2022-06-01 2457
-
静止无功发生器的主要功能是什么2023-12-20 4740
-
SVG静止无功发生器与SVC静态无功补偿器的区别2024-01-17 3762
-
静止无功发生器的原理和优势2024-07-25 9477
全部0条评论

快来发表一下你的评论吧 !
