

告别2-5%的能量损失:芯森CM9A电流传感器如何优化风电MPPT精度
描述
2025年全球风电新增装机预计达1.5亿千瓦,其中我国占比超过50%,风能是继光伏爆发式发展之后又一个增长点,然而,风机叶片、齿轮箱、逆变器故障导致年发电量损失严重。发电效率损耗逐渐成为行业的关注焦点。同时,风电机组变流器的MPPT效率、并网稳定性和故障诊断等问题也影响风能的发展。下文尝试讨论如何借助一种高精度传感器提升风电系统的效率。
风能变流器的最大功率点跟踪(MPPT)
不仅光伏有MPPT,风电也有MPPT,据相关统计,风流器MPPT精度不足,可能导致能量损失2-5%,为了实现风能资源的最大化利用,出现了最大功率点跟踪(MPPT)控制技术,即风能变流器的最大功率点跟踪(MPPT)技术,该技术通过动态调节风轮机的转速或桨距角,使机组在不同风速下始终输出最大功率。其核心原理是匹配风能转换系统的阻抗与负载阻抗,实现能量捕获效率最大化。
传统MPPT控制方法
传统的MPPT控制方法主要分为两类:基于风速测量的间接控制法和不依赖风速测量的直接控制法,主要有:叶尖速比法、功率信号反馈法和爬山搜索法。由于精确测量风速困难且成本高,因此直接控制法在实际应用中更为广泛,由于篇幅有限,本文仅就直接控制法中基于功率曲线的功率信号反馈法展开述说。该方法采用直接检测发电机输出功率的方式,通过寻优算法在功率-转速特性曲线上定位最大工作点,核心任务是:实时调整发电机侧的负载,使风力发电机始终运行在其当前风速下的最佳功率-转速曲线上,从而捕获最大的风能。这个过程需要精确的功率计算,即功率 = 电压 × 电流。自然界的风是瞬息万变的,变流器的控制环路必须足够快,才能跟上风能的变化,因此需要足够快的电流监测方案。
功率信号反馈控制法
这是一种不依赖风速测量的直接方法,也是最经典和常用的MPPT策略之一。它包含两个主要变种:
a) 最佳转矩控制法
基本原理:
- 已知风机的气动特性,在最佳叶尖速比λ_opt下,风轮的机械功率Pm与发电机转速ω的立方成正比,即 Pm_opt = K_opt * ω³。
- 同时,发电机的电磁转矩Tg与功率Pm成正比(Pm = Tg * ω)。因此,可以得出最佳转矩指令 T_ref = K_opt * ω²。
- 控制器(通常是变流器)通过快速调节发电机转矩,使其严格跟踪这个最佳转矩曲线。
工作过程:
- 测量当前的发电机转速ω。
- 根据预设的K_opt计算出当前转速下的最佳转矩参考值T_ref。
- 通过变流器的转矩控制环,使发电机输出转矩跟踪T_ref。
优点:
- 无需风速计,结构简单,鲁棒性强。
- 控制响应快,稳定性好。
- 是目前风能变流器中应用最广泛的传统MPPT方法。
缺点:
其性能依赖于预设的K_opt参数,该参数会因风机叶片污染、空气密度变化等因素而改变,导致偏离真正的最大功率点。
b) 查表法
基本原理:
- 通过前期的风机特性测试,预先获得一条在不同转速下的最佳功率曲线P_opt = f(ω),并存储在控制器中。
- 系统测量当前转速ω,通过查表得到该转速下应该输出的目标功率P_ref。
- 控制器调节系统,使输出功率跟踪P_ref。
优缺点:
与最佳转矩法类似,但它直接控制功率。其性能同样严重依赖于预先存储的功率-转速曲线的准确性。
在实际风能系统中,最佳转矩控制法由于其良好的综合性能,被认为是最经典、最主流的传统MPPT方法。
霍尔电流传感器在风能MPPT中的作用
在最佳转矩控制和查表法中的作用
在最佳转矩控制和查表法,都依赖电流传感器进行电流数据采集与反馈,在MPPT中电流传感器具体作用如下:
实现精确的转矩控制
基本原理:发电机的电磁转矩Tg 与产生该转矩的电流Iq (在矢量控制中称为转矩电流分量) 成正比,即 Tg=Kt⋅Iq。
工作流程:
MPPT控制器根据测量的转速 ω,计算出最佳转矩指令 Tref。
转矩指令 Tref 被转换为 电流指令 Iqref。
变流器的电流内环开始工作,它需要实时测量发电机的实际相电流。
霍尔电流传感器(如CM9A) 在此刻提供高精度的、与外界隔离的相电流反馈值 Iqfb。
控制器比较 Iqref 和 Iqfb,通过PID调节器等,驱动变流器的功率开关器件(如IGBT),使实际转矩电流Iq 快速、准确地跟踪指令值。
核心价值体现:
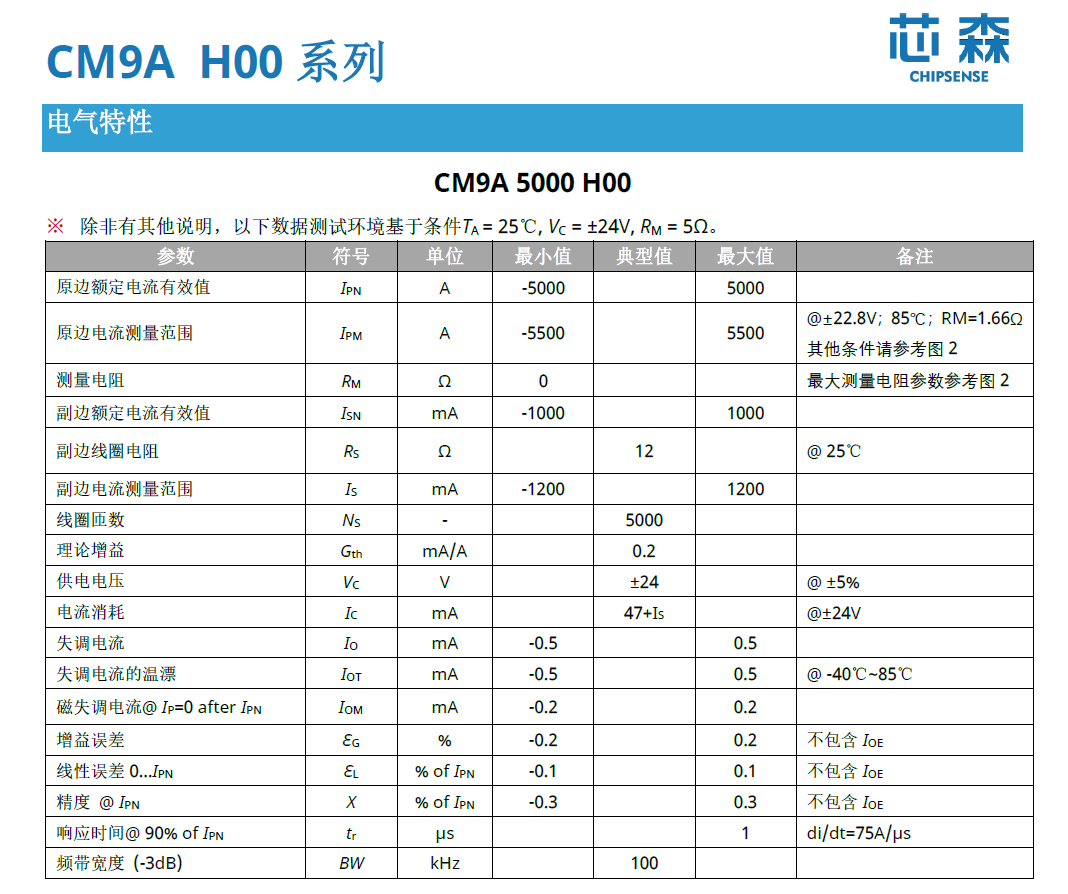
精度: CM9A的高精度(±0.3%)确保了转矩控制的精度。如果电流测量有1%的误差,那么实际转矩也会产生约1%的误差,导致风机偏离最大功率点,造成能量损失。
动态响应: CM9A的快速响应(≤1μs)和宽带宽(100kHz)确保了电流内环——这个控制系统中最内层、最快速的闭环——能够稳定且快速地响应。这是整个MPPT系统能够跟上风速变化的前提。
在 爬山搜索法 中的作用
作用:提供功率计算的关键输入
基本原理: 爬山法通过观察输出功率P的变化来决定行动。
功率计算: 功率 P=V×I。这里,电压V和电流I都需要被精确测量。
工作流程:
系统对转速施加一个小的扰动。
霍尔电流传感器测量扰动后的电流 I,同时电压传感器测量电压 V。
控制器计算功率 P=V×I。
比较扰动前后的功率差 ΔP,决定下一次扰动的方向。
核心价值体现:
测量准确性: 如果电流测量不准确,计算出的功率 P 和功率变化 ΔP 就是错误的。算法可能会基于错误信息做出完全相反的决策,导致系统远离最大功率点,或者在MPP附近产生更大的振荡,效率损失严重。
抗干扰能力: 风电环境中电磁干扰严重。CM9A的高抗干扰能力和优异的线性度,能确保在复杂的噪声环境中依然输出干净、真实的电流信号,防止算法被噪声“欺骗”。
霍尔电流传感器的优势
在MPPT应用中,霍尔电流传感器因以下特点成为首选:
- 非接触式测量:无需断开电路,安装维护方便。
- 宽频响应:适应MPPT的高速采样需求(响应时间可达微秒级)。
- 高绝缘性:适用于高压变流器,提升系统安全性。
- 抗干扰能力强:在风电场的复杂电磁环境中保持数据稳定。
总结:
虽然在基于风速测量的间接控制法不直接依赖电流传感器,但发电机的控制也需要通过电流环来实现,此外过流保护和系统监控也用到电流传感器,总而言之,霍尔电流在MPPT方法中,控制反馈、功率计算和保障系统安全中起着关键作用,如果说,MPPT算法是风机的大脑,负责思考并制定策略;变流器是肌肉,负责执行;那么电流传感器就是这肌肉的神经末梢,它将执行的实际情况实时、准确地反馈给大脑,确保大脑的策略被完美执行,并根据反馈进行微调。
-
DS-CM6A B00-CN-V2 闭环电流传感器-芯森电子2024-04-23 300
-
DS-CM4A H05-CN-V1闭环电流传感器-芯森电子2024-04-19 318
-
DS-CM4A H00-CN-V1闭环霍尔电流传感器-芯森电子2024-04-16 262
-
DS-CM3A H01-CN-V1闭环电流传感器-芯森电子2024-04-15 277
-
DS-CM2A H00-CN-V1闭环霍尔电流传感器-芯森电子2024-03-15 327
-
芯森电子CM6A B00闭环电流传感器:精准测量电流的得力助手2024-03-14 1135
-
芯森电子CM4A H03电流传感器:高精度测量直流、交流及脉冲电流的优选方案2024-03-11 1299
-
芯森电子CM4A H00电流传感器:基于闭环霍尔原理的精准测量利器2024-03-08 1292
-
芯森电子CM2A H00闭环霍尔电流传感器介绍2024-03-05 1393
-
芯森电子CM1A H00闭环霍尔电流传感器介绍2024-03-04 1433
-
高性价比闭环霍尔电流传感器芯森CM5A H00介绍2023-09-07 1474
-
闭环霍尔电流传感器CM2A H00在变频器的应用2023-08-31 2005
-
芯森CM1A H00闭环霍尔电流传感器在UPS电源中的应用2023-08-28 1659
-
LEM国产替代 | 伺服电机用高精度电流传感器芯森CM2A2023-06-01 1911
全部0条评论

快来发表一下你的评论吧 !
