

基于SPT-K控制器实现汽车超声波自动刹车系统的设计
描述
前言
现在,人们在享受驾驶乐趣的同时,更加注重的是汽车的安全性,许多“追尾”事故都与车距保持不当有关。为了解决能见度较低情况下的安全问题,我们基于超声波测距的原理,采用SPT-K控制器设计了一套系统,实现在行驶过程中,一旦出现前后车距小于安全距离、对人车安全构成威胁时,车辆自动报警、自动刹车的功能,起到减少交通事故发生的目的。
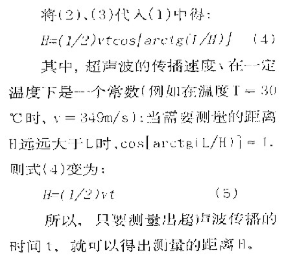
1、超声波测距原理
人能听到的声音频率为:20Hz~20kHz,即为可听声波,超出此频率范围的声音,即20Hz以下的声音称为低频声波,20kHz以上的声音称为超声波。超声波为直线传播方式,频率越高,绕射能力越弱,但反射能力越强。为此,利用超声波的这种性能就可制成超声波传感器。另外,超声波在空气中的传播速度较慢,为340m/s,这就使得超声波传感器使用变得非常简单。我们选用压电式超声波传感器。它的探头常用材料是压电晶体和压电陶瓷,是利用压电材料的压电效应来工作的。逆压电效应将高频电振动转换成高频机械振动,从而产生超声波,可作为发射探头;而利用正压电效应,将超声振动波转换成电信号,可作为接收探头。

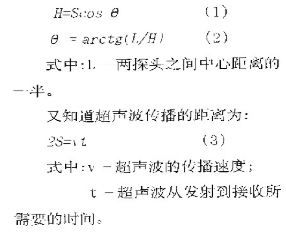
由图一可知被测距离:
2、SPT-K控制器的功能特点
由于汽车工作的环境十分恶劣,对硬件的稳定性、可靠性要求很高,同时考虑到装置的可扩展性,我们选用上海派恩科技有限公司代理的从芬兰原装进口的嵌入式系统SPT-K控制器。该控制器能够在长期恶劣环境(高振动冲击、低温、高温、温度变化剧烈和高湿度等)下工作,是一种集可编程逻辑控制器、比例放大器、模拟量输入A/D模块、继电器输出功能于一身的高性能机械专用控制器。
SPT-K控制器具有如下特点:
l、取代了传统电液控制的比例放大器/电路,可同时驱动12片电液比例阀,在液压系统的设计成本上有绝对的优势。
2、具有大电流输出端口(0~3A),取代了传统电路中的继电器。
3、控制器的模拟量输入端口具备了不同信号的处理能力,不论是电阻信号还是电流信号或是电压信号都可以进行采集并使用软件编程进行设定。
4、控制器的逻辑控制功能可以很轻松的完成以前用各种继电器和模块很难解决的逻辑运算及数学运算。
5、控制器内部采用数个16位高性能微处理器以及大容量的内存空间使其具有极强的数字处理能力,可以完成很多以前必须由电脑高级语言来编程的复杂算法,如直行纠偏多PID控制、发动机油泵复合控制、姿态模糊控制、自动驾驶等等。
6、控制器是基于CANBUS,总线开发的产品,当系统节点较多或信号传输距离较远时可以使用不止一个控制器组网,节省接线、提高可靠性、并且灵活性和可扩展性大大加强。
由上述的特点可见:在超声波汽车自动刹车系统中使用SPT-K控制器,简化了系统电路,方便了设计和维修。并且,SPT-K控制器硬件的可靠性远优于同类产品,使得无论在东北雪原极寒,还是在东南亚热带雨林中,都具备极高的可靠性,故障率大幅降低。
3、系统整体设计
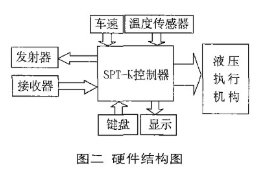
3.1系统硬件框图
整个系统的硬件框图如图二所示。构成超声测距系统的电路功能模块包括发射电路、接收电路、键盘显示电路、核心功能模块SPT-K控制器及一些辅助电路。采取收发分离方式有两个好处:一是收发信号不会混叠,接收探头所接收到的纯为反射信号;二是将接收探头放置在合适位置,可以避免超声波在物体表面反射时造成的各种损失和干扰,提高系统的可靠性。
3.2系统软件设计
SPT-K控制器使用欧洲通用IECll31-1语言编程,多种语言编程可选,简单易学,可读性强,可现场无数次FLASHING下载程序,改变程序通过EPROM参数无须重新下载或修改程序,通常使用装车的显示器完成,非常方便。
软件设计流程图如图三所示。
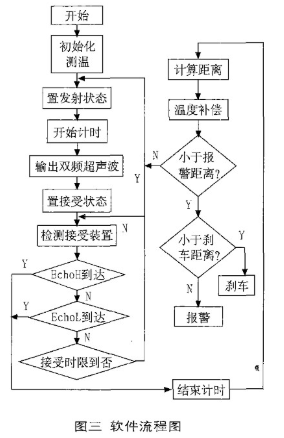
由于在高速公路上和在市区的情况不同,如果我们仅仅根据这两种情况分档选择报警和刹车参数,使得车辆在市区内在与前面车距缩短为2m时才报警,有可能因为本车速度很快,而前面的车静止或车速很慢,就算刹车也无法避免车祸的产生。所以,在设定报警和刹车参数时,我们考虑到车速对刹车至停止的距离的影响,根据一定的算法来设定参数,以保证车辆绝对的安全。
4、系统设计优化
4.1提高测距的范围
由于空气对超声波的吸收与超声波频率成正比,因此用来测距的超声波的频率不能很高。另一方面,频率越低,波长越长,测量的绝对误差就越大。所以,40Kz的超声波单频测距的范围只有5~6米,无法满足我们的要求。为了解决测量范围和测量精度之间的矛盾,我们采用双频测距的方法。其测距原理是:控制器现发出一串频率为fH的超声波,串长度可以有10~16个完整的波形,接着送出4~8fL低频率的超声波。这种在时域上连续的两种频率的超声波被前方的目标反射后,形成回波,回波经由接收器形成回波脉冲EchoH和EchoL。由于高频声波先发出,对于同一个目标,其回波EchoH先到达CPU,因此,对于较近的目标,首先用高频超声波探测。当目标较远时,高频超声波被空气吸收而大幅衰减,接收器接收到的回波中只有低频超声波EchoL。由于该装置在距离较远时对精度要求不是很高,所以可以用EchoL探测。

4.2发射器探头对接收器探头的影响
超声波从发射到接收的时间间隔是由控制器内部的定时器来完成的。由于发射器探头与接收器探头的距离不大,有部分波未经被测物就直接绕射到接收器上,造成发送部分与接受部分的直接串扰问题。这一干扰问题可通过软件编程,使控制器不读取接收器在从发射开始到“虚假反射波”结束的时间段里的信号。这样,就有效的避免了干扰,但另一方面也形成了20cm的‘’盲区“。此”盲区“很小,对本系统没有影响。
4.3温度的补偿
因为超声波的传播速度:
5、结束语
本系统具有硬件简单、容易实现、测距范围比较大、灵敏度高、可靠性好的优点,具有很高的应用价值。
责任编辑:gt
-
超声波传感器在汽车倒车与智能泊车系统中的应用2026-06-26 70
-
超声波测距系统设计2008-10-15 8882
-
汽车防撞系统设计可以实现自动刹车功能2015-05-16 3060
-
超声波测距系统毕设2016-04-18 6495
-
超声波传感器在指导汽车安全驾驶中的应用2017-10-31 3676
-
超声波焊接原理和应用2018-07-23 4335
-
超声波塑料焊接与超声波金属焊接的不同点2018-07-25 3703
-
基于STM32超声波测距设计的合集2018-09-05 11573
-
基于双超声波接收头的防撞小车系统2018-11-02 1975
-
超声波传感器在自动驾驶环境感知下的应用有哪些2020-08-18 2850
-
基于STM32的超声波测距系统设计2022-01-06 1923
-
如何使用超声波感应器2022-11-11 772
-
汽车后桥环焊缝自动超声波探伤系统2010-01-23 688
-
超声波液位控制器2016-01-11 806
-
超声波发生器的原理2023-12-24 4046
全部0条评论

快来发表一下你的评论吧 !
