

利用PID控制算法和温度传感器实现锅炉温度流量串级控制系统的设计
描述
引 言
现代化过程工业向着大型化和连续化的方向发展,生产过程也随之日趋复杂,而对生产质量﹑经济效益的要求,对生产的安全、可靠性要求以及对生态环境保护的要求却越来越高。不仅如此,生产的安全性和可靠性,生产企业的经济效益都成为衡量当今自动控制水平的重要指标。因此继续采用常规的调节仪表(模拟式与数字式)已经不能满足对现代化过程工业的控制要求。由于计算机具有运算速度快﹑精度高﹑存储量大﹑编程灵活以及具有很强的通信能力等特点,目前以微处理器﹑单片微处理器为核心的工业控制几与数字调节器—过程计算机设备,正逐步取代模拟调节器,在过程控制中得到十分广泛的作用。
在控制系统中引入计算机,可以充分利用计算机的运算﹑逻辑判断和记忆等功能完成多种控制任务和实现复杂控制规律。在系统中,由于计算机只能处理数字信号,因而给定值和反馈量要先经过A/D转换器将其转换为数字量,才能输入计算机。当计算机接受了给定值和反馈量后,依照偏差值,按某种控制规律(PID)进行运算,计算结果再经D/A转换器,将数字信号转换成模拟信号输出到执行机构,从而完成对系统的控制作用。
初期的过程控制系统采用基地式仪表和部分单元组合仪表,过程控制系统结构大多是单输入,单输出系统,过程控制理论是以频率法和根轨迹法为主体的经典控制理论,以保持被控参数温度、液位、压力、流量的稳定和消除主要扰动为控制目的过程。其后,串级控制、比值控制和前馈控制等复杂过程控制系统逐步应用于工业生产中,气动和电动单元组合仪表也开始大量采用,同时电子技术和计算机技术开始应用于过程控制领域,实现了直接数字控制(DDC)和设定值控制(SPC)。
之后,以最小二乘法为基础的系统辨识,以极大值和动态规划为主要方法的最优控制和以卡尔曼滤波理论为核心的最佳估计所组成的现代控制理论,开始应用于解决过程控制生产中的非线性,耦合性和时变性等问题,使得工业过程控制有了更好的理论基础。同时新型的分布式控制系统(DCS)集计算机技术、控制技术、通讯技术、故障诊断技术和图形显示技术为一体,使工业自动化进入控制管理一体化的新模式。现今工业自动化己进入计算机集成过程系统(CIPS)时代,并依托人工智能,控制理论和运筹学相结合的智能控制技术向工厂综合自动化的方向发展。
MATLAB还具有根强的功能扩展能力,与它的主系统一起,可以配备各种各样的工具箱,以完成一些特定的任务。MATLAB具有丰富的可用于控制系统分析和设计的函数,MATLAB的控制系统工具箱(Control System Toolbox)提供对线性系统分析、设计和建模的各种算法;MATLAB的系统辨识工具箱(System Identification Toolbox)可以对控制对象的未知对象进行辨识和建模。MATLAB的仿真工具箱(Simulink)提供了交互式操作的动态系统建模、仿真、分析集成环境。它用结构框图代替程序智能化地建立和运行仿真,适应线性、非线性系统;连续、离散及混合系统;单任务,多任务离散事件系统。
1、被控对象模型建立
本系统以锅炉水温为主要控制对象,以进水流量为辅助控制对象。目的是在一定加热功率下,控制水温的恒定。其流程图如图1.1所示:
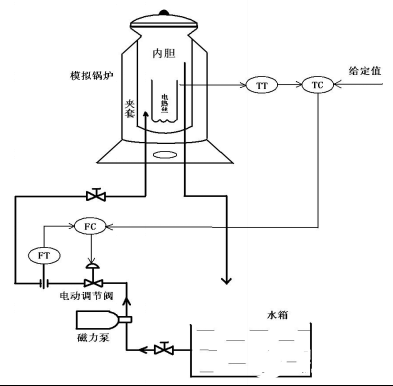
图1.1 测量被控对象阶跃响应流程图
由温度传感器(主检测变送器)将温度信号转变为电信号与温度给定值相比较后送至主控制器,主控制器输出流量控制值与流量变送器(副检测变送器)反馈回来的进水流量信号相比较后输入流量调节器(副控制器),由流量调节器控制调节阀的开度来控制进水流量,由此来对锅炉水温进行定值控制。其系统框图如图1.2所示:
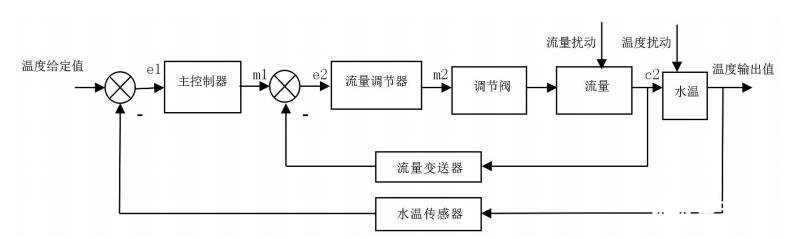
图1.2 锅炉水温与流量串级控制系统框图
在控制系统设计工作中,需要针对被控过程中的合适对象建立数学模型。被控对象的数学模型是设计过程控制系统、确定控制方案、分析质量指标、整定调节器参数等的重要依据。被控对象的数学模型(动态特性)是指过程在各输入量(包括控制量和扰动量)作用下,其相应输出量(被控量)变化函数关系的数学表达式。
在水温-流量串级控制系统中,我们所关心的是如何在一定的电热功率下控制好水温的恒定。进水流量是系统的被控对象,必须通过测定和计算他们模型,来分析系统的稳态性能、动态特性,为其他的设计工作提供依据。
2 、测量被控对象阶跃响应曲线
在本设计中通过实验建模的方法,分别测定被控对象温度和流量在输入阶跃信号后的响应曲线和相关参数。
在测定模型参数中可以通过以下两种方法控制调节阀,对被控对象施加阶跃信号:
通过智能调节仪表改变调节阀开度,实现对被控对象的阶跃信号输入。
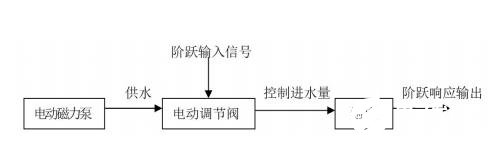
图2.1 水温-流量模型测定原理图
(2) 通过在MCGS监控软件组建人机对话窗口,改变调节阀开度,实现对被控对象的阶跃信号输入。
编写程序如下:
流量pv=pv1
温度pv=pt /测量值显示输出
If set=0 then
Output=6
Endif / set为0时输出6mA电流给调节阀
If set=1 then
Output=8
Endif / set为1时输出8mA电流给调节阀
其中set为外部输入信号,可由按钮设定,Output为输出信号,大小即为输出电流值,单位mA。电动调节阀输入信号范围为4—20mA电流信号。这样就可以实现电动调节阀阶跃信号给定。6mA电流对应电动调节阀开度为(6-4)/(20-4)=12.5%。8mA电流则对应(8-4)/(20-4)=25%的开度。阶跃前后流量测量值分别为6.5和10.2。阶跃值为10.2-6.5=3.7。实际测得阶跃如图2.2所示:
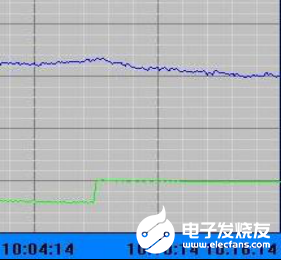
图2.2试验测得阶越响应曲线
当给出阶跃信号后,温度响应曲线逐渐下降至稳定,为符合一般习惯,方便处理,将数据以第一次采样值为标准,转换为逐渐上升至稳定的曲线。转换方法y=33.71-x。式中y为处理后数据,x为处理前数据。
由试验测得给定阀的开度分别为12.5、25、40、80时对应传感器测得流量值为6.5、10.2、14.6、26.2。
3、 控制系统框图设计
控制系统框图是控制系统实现的前提条件,它根据控制工艺的具体流程,反映系统信息的流动控制过程,本设计采用串级控制,考虑流量变化快,时间惯性小,应较快得到抑制,选择流量作为副被控参数,副环是随动控制,追求快速性,因而采用P调节,P调节器输出信号控制阀的开度改变流量,流量传感器将检测信号送回P调节器并形成负反馈,此闭环作为内环。温度变化相对缓慢,时间惯性大,作为主被控参数,主环是定值控制,追求准确性,采用PID调节。
将给定值与温度传感器反馈信号的差值输入主调节器,进行PID运算,实现控制算。主调节器输出信号作为内环的给定值,与流量传感器反馈信号的差值送P调节器运算并输出,以控制调节阀,通过流量变化,影响锅炉温度。得到控制系统框图:
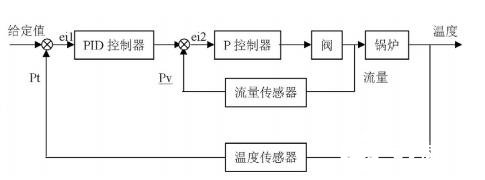
图3控制系统框图
4、 Simulink控制系统仿真
Simulink可以动态地模拟出在给多种信号作用下所构造控制系统的响应,只需将控制系统框图内对象改写为传递函数形式。
模拟PID控制器的传递函数D(s)=U(s)/E(s)=Kp(1+1/TiS+TdS)可理解为同一信号分别经比例(图4.3中fcn1)、积分(图4.3中fcn2)、微分(图4.3中fcn3)运算后相加;P调节器为纯比例环节(图4.3中fcn4);锅炉传递函数已求得(图4.3中fcn);首先假设调节阀为纯比例环节(图4.3中fcn5),可构造如下系统图,其中PID、P、阀的参数均未整定:
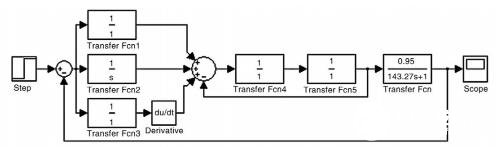
图4.1simulink控制系统线性仿真
考虑到实际使用中,由于阀有动作死区,即位于0开度时可能有流量或小开度时无流量,达到最大开度时,控制信号尽管继续增大但已经失去调节作用等原因,结合测得阀的流量特性,将阀的传递函数作为非线性环节处理,得到非线性系统图:
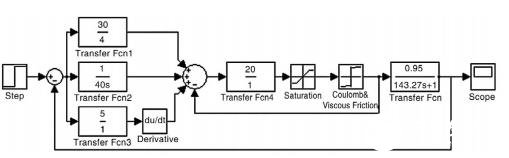
图4.2simulink控制系统非线性仿真
图4.2中PID、P参数已经整定,Saturation和Coulomb&Viscous friction两个环节组合形成阀的流量特性。Saturation为限幅环节,上限幅值为100,下限幅值为0,Coulomb&Viscous friction为粘滞摩擦环节,函数设为y=0.30x+2.9。
为了体现串级控制的优势,必须将串级控制系统的抗干扰能力和单回路控制系统的抗干扰能力加以比较。
串级控制的特点在于抗二次干扰能力强,在串级控制系统副回路中加入阶越信号来模拟流量的干扰,同时为了能够将数据与单回路控制系统抗干扰效果在同一张图内进行相比较,需要设置工作区域B,存储方式为数列。
单回路控制系统是采用PID控制器直接控制流量。在同样位置加入流量的阶跃干扰信号,将仿真结果输出到工作区域C中, 存储方式为数列。
只有当单回路控制系统的阶越响应曲线与串级控制系统的阶越响应曲线比较近似,并施加同样的干扰信号,其抗干扰能力才具有可比性。在无干扰信号时,调节单回路控制系统参数,使响应曲线接近同样阶跃信号作用下串级控制系统响应曲线。
再加入干扰信号,对于图4.6和图4.7中的两个控制系统仿真,其仿真时间均设为4000s,采样时间设为20s。干扰信号阶越时刻为2000s,阶越初值0,阶越终值18。
仿真后结果分别存储于工作区域B、C中,将两系统响应数据在同一张图内进行比较,需在Matlab中编写程序如下:
x=0:20:4000;
plot(x,b,x,c)
grid
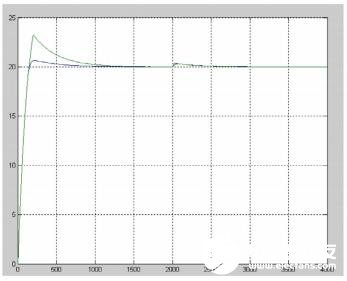
图4.3 两种控制系统抗干扰能力比较图
图4.3中绿色曲线是单回路控制系统响应曲线,蓝色曲线是串级控制系统响应曲线。首先放大图中两系统阶跃响应部分,可见两控制系统在上升段基本重合,调节时间基本相同,单回路控制系统阶跃响应超调量偏大,综合各种指标可认为两系统在阶跃信号下控制效果大致相同。在两控制系统控制效果相同的情况下,加入干扰信号,单回路控制系统在干扰信号的作用下,最大偏差达到0.4,为稳态值的2%,在曲线末端甚至出现小幅度波动。而串级控制系统在干扰信号的作用下,最大偏差仅在0.1左右,可认为系统仍处于的特点稳定状态,两者抗干扰能力十分悬殊。充分证明了串级控制抑制二次干扰能力强。
5 、结论
本文以锅炉控制系统为研究对象,应用过程控制理论以及仿真技术、计算机远程控制、组态软件,设计了锅炉温度流量串级控制系统。首先,通过实验法建立锅炉的数学模型,得到锅炉温度与进水流量之间的传递函数,通过对理论设计的控制方案进行仿真,得到较好的响应曲线,为实际控制系统的实现提供先决条件。其次,使用智能仪表作为控制器,组建现场仪表过程控制系统,通过参数整定,得到较好现场控制效果。再次,实现积分分离的PID控制算法。通过MATLAB实验仿真表明所设计的系统控制响应速度快、控制精度高,具有较好的动态特性。
责任编辑:gt
-
温度自动控制系统设计2011-05-30 3145
-
求帮忙--PID温度控制系统设计2013-05-10 3784
-
基于PID算法的温度控制2013-11-04 2
-
模糊PID 控制算法在带式淬火炉温度控制系统中的应用与设计2009-04-07 732
-
电热锅炉温度-液位双回路控制系统2009-05-30 877
-
基于Fuzzy-PID的电阻炉温度控制系统2009-06-01 836
-
基于MCGS的工业锅炉恒温PID控制系统设计2009-08-15 814
-
基于PLC的内模PID窑炉温度控制系统设计2009-09-14 1166
-
模糊PID在电阻炉温度控制系统中的应用2010-04-28 784
-
基于NTC的激光器温度控制系统2011-07-08 1312
-
基于单片机的锅炉温度控制系统的设计_完成版2016-01-04 1382
-
模糊PID电阻炉温度控制系统应用2016-04-06 802
-
电热炉温度控制系统的设计2016-05-11 1383
-
使用LabVIEW实现温度控制系统设计的论文研究2021-01-25 1525
-
基于PID算法的水箱温度控制系统2021-11-24 1226
全部0条评论

快来发表一下你的评论吧 !
