

基于DR1M90的Linux-RT内核开发:从编译配置到GPIO/按键应用实现(2)
电子说
描述
系统开发说明
Linux-RT内核与普通Linux内核在系统开发上基本保持一致,具体操作方法请参考《Linux系统开发手册》。
其中,使用Linux-RT内核进行系统开发仅在Kernel开发的配置与编译环节存在关键差异,其他开发流程(如U-Boot开发、Rootfs开发等)与普通内核完全一致。以下对Linux-RT内核的Kernel进行说明。
Kernel开发(Linux-RT)
Kernel配置
执行如下命令,进入LinuxSDK源码目录下的内核目录,打开图形配置界面。
Host# cd /home/tronlong/DR1/SDK_2025.1/
Host# ./build.sh kernelmenuconfig
 图 28
图 28
(1)配置RT内核
打开图形配置界面,依次打开"General setup -> Preemption Model(Preemptible Kernel(Low-Latency Desktop))"。
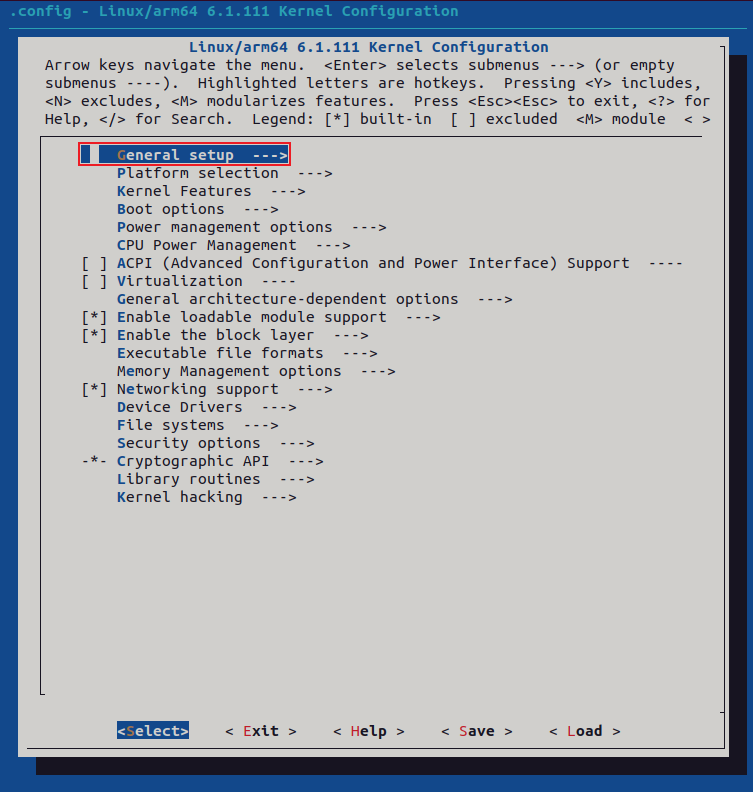 图 29
图 29
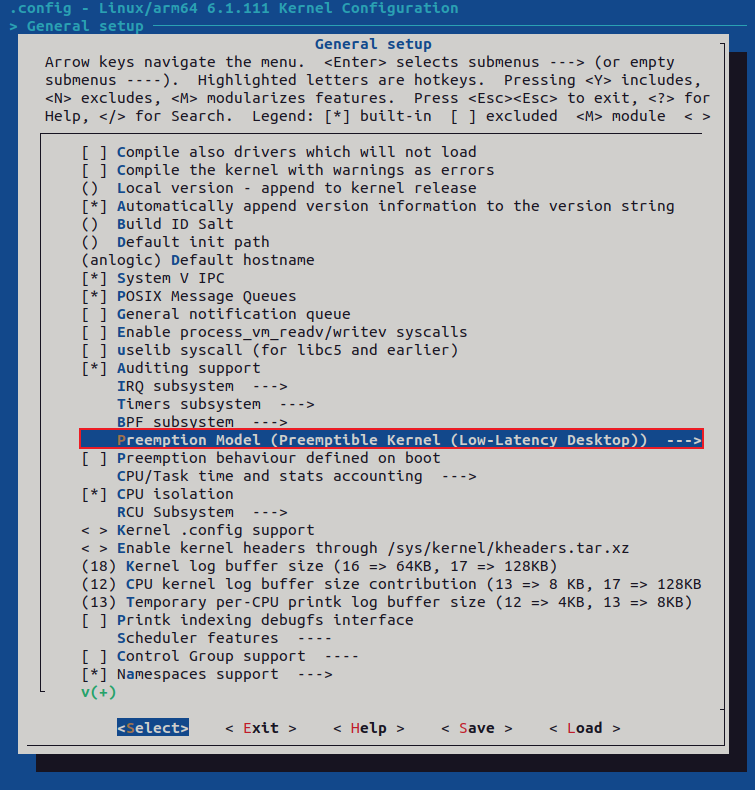 图 30
图 30
进入如图所示界面后,选择"Fully Preemptible Kernel (Real-Time)",接着选择保存。
备注:我司提供的普通内核版本默认为"Preemptible Kernel(Low-Latency Desktop)"
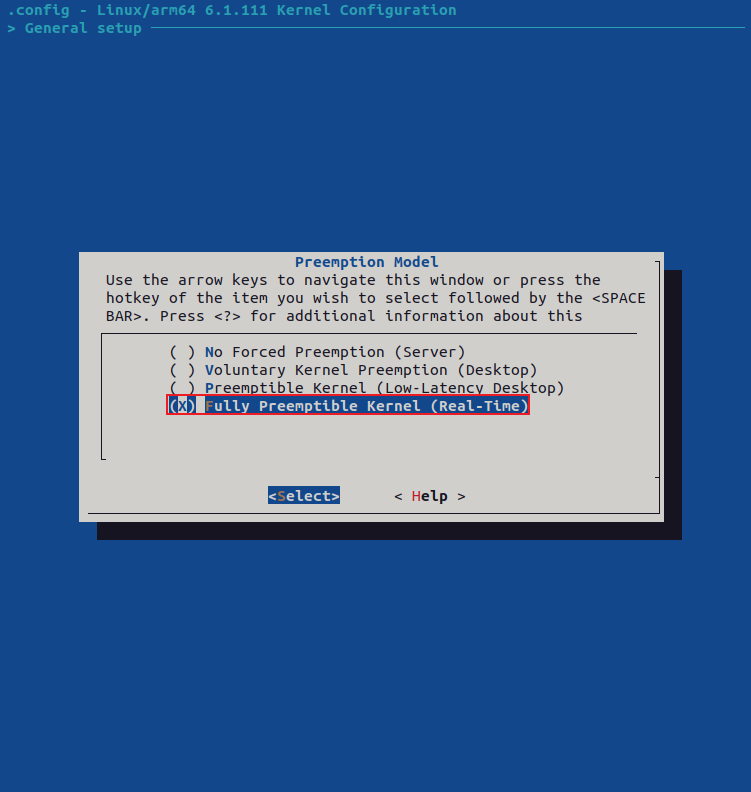 图 31
图 31
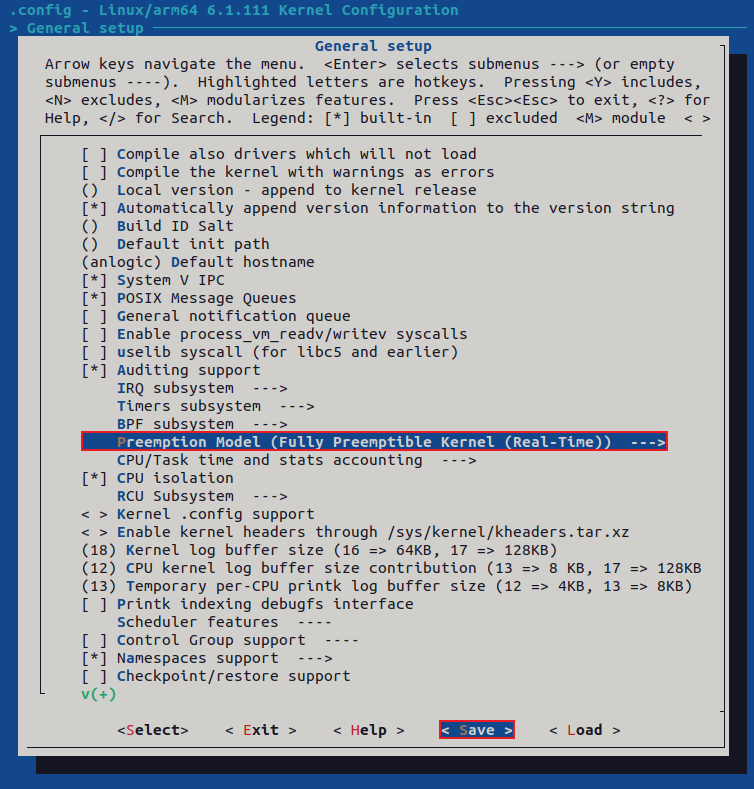 图 32
图 32
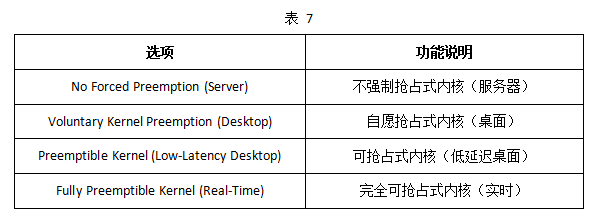
其他选项的参数解析如下表所示。
(2)配置Linux-RT内核定时器频率
打开图形配置界面,依次打开"Kernel Features -> Timer frequency(250 HZ)"。
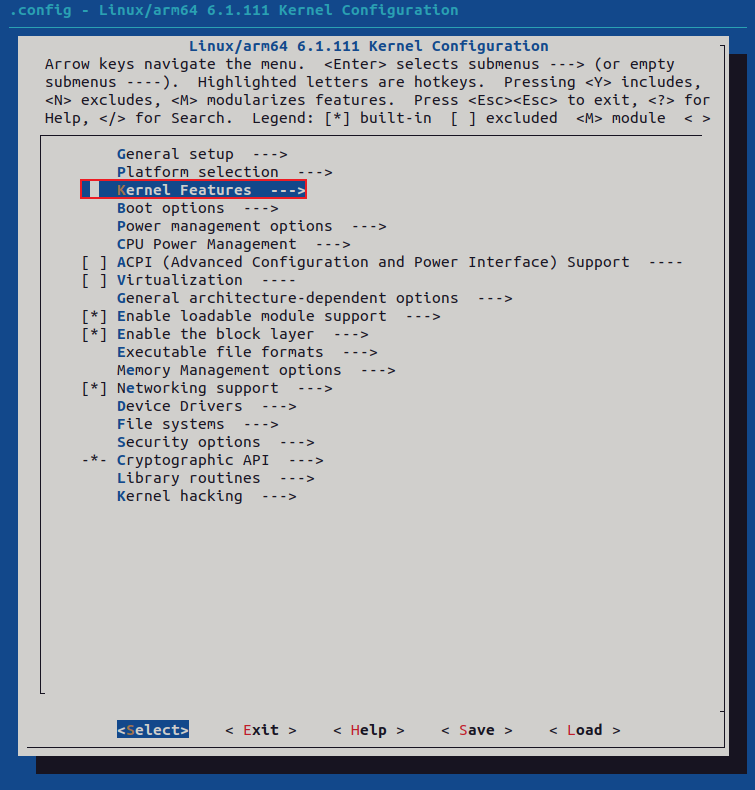 图 33
图 33
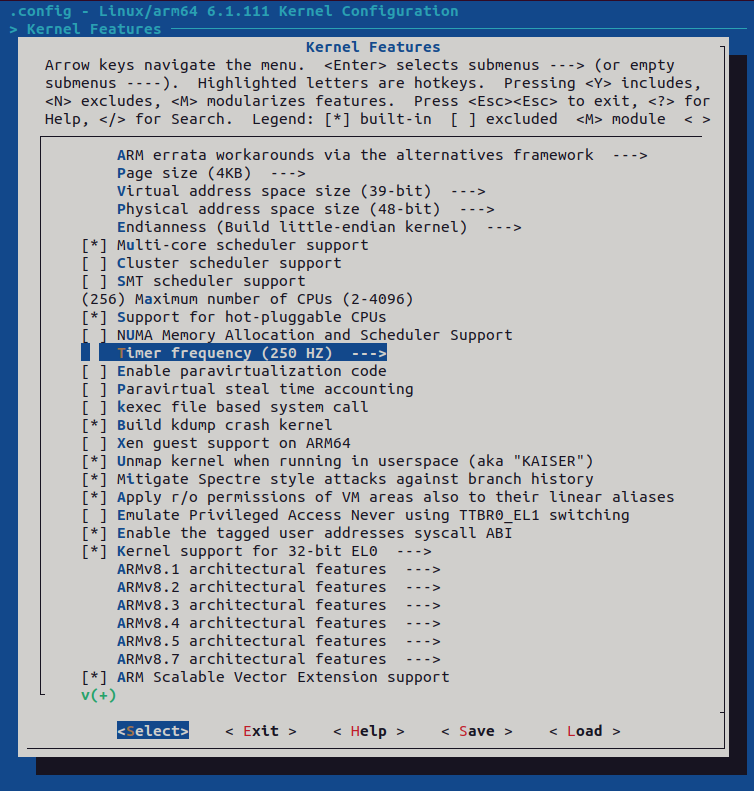 图 34
图 34
进入如图所示界面后,选择"1000 HZ",接着选择保存。
备注:普通Linux内核需要选择"250 HZ"。
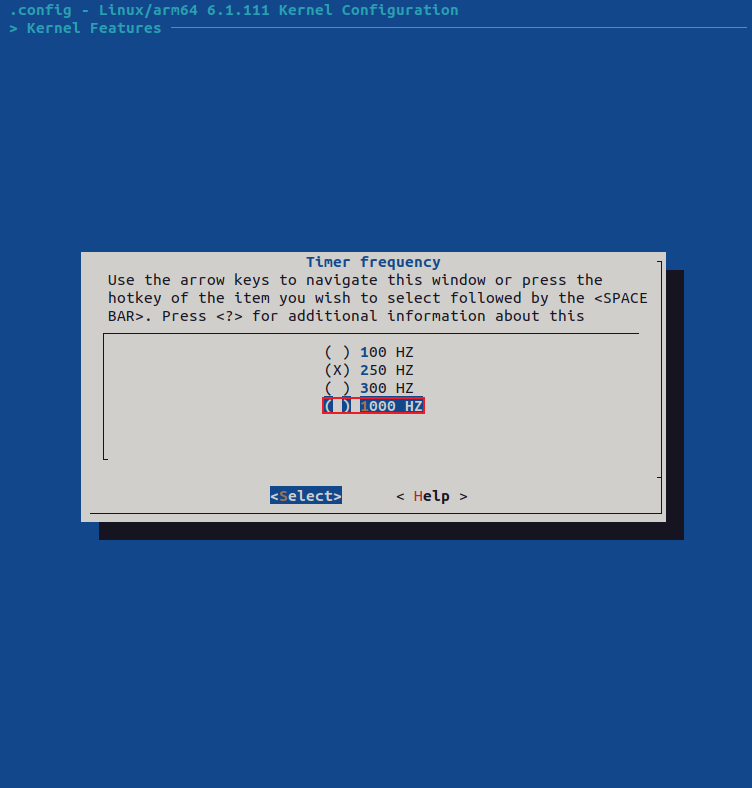 图 35
图 35
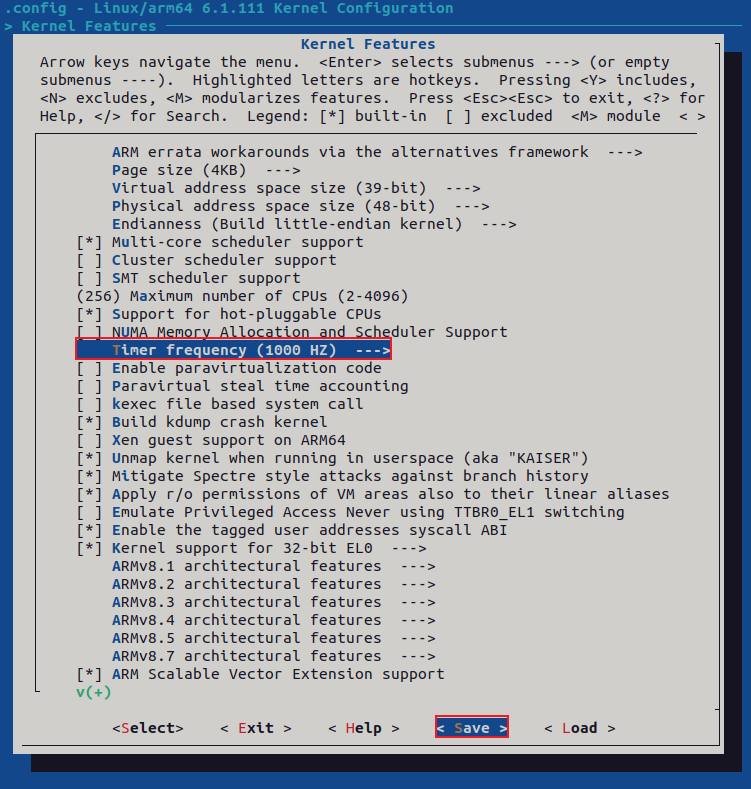 图 36
图 36
配置完成后,将配置选项自动保存到LinuxSDK根目录下的"linux/arch/arm64/configs/anlogic_dr1m90_defconfig"中,执行如下命令,检查RT内核是否配置成功。
Target# grep -nr "PREEMPT_RT" ./linux/arch/arm64/configs/anlogic_dr1m90_defconfig
Target# grep -nr "1000" ./linux/arch/arm64/configs/anlogic_dr1m90_defconfig
 图 37
图 37
编译Kernel
请参考《Linux系统开发手册》的Kernel开发章节编译Kernel。
应用开发说明
Linux-RT内核与普通Linux内核在应用开发上保持一致,具体操作方法请参考《Linux应用开发手册》。
本章节说明Linux-RT应用开发组件支持情况并介绍基于Linux-RT内核开发的应用案例。
rt_gpio_ctrl案例
案例说明
通过创建一个基本的实时线程,在线程内触发LED的电平翻转,同时程序统计实时线程的调度延时,并通过示波器测出LED电平两次翻转的时间间隔。由于程序默认以最高优先级运行,为避免CPU资源被程序完全占用导致系统被挂起,因此在程序中增加100us的延时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中,计算出触发LED电平翻转的系统调度延时。
案例测试
执行如下命令,查看程序运行参数。
Target# ./rt_gpio_ctrl -h
 图 38
图 38
参数解析:
-t:程序运行时间,单位s,默认为10s;
-d:延迟时间,单位us,默认为100us;
-h:打印帮助信息。
将案例bin目录下的可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序,指定程序以增加100us的时间延时运行,再按"Ctrl + C"退出测试,串口终端将打印程序统计的延迟数据,如下图所示。
Target# ./rt_gpio_ctrl -t 10 -d 100
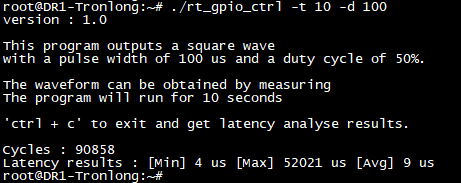 图 39
图 39
同时使用示波器捕捉LED两次电平翻转之间的间隔,即可得到线程调度的延迟,测试点为R44电阻一端。
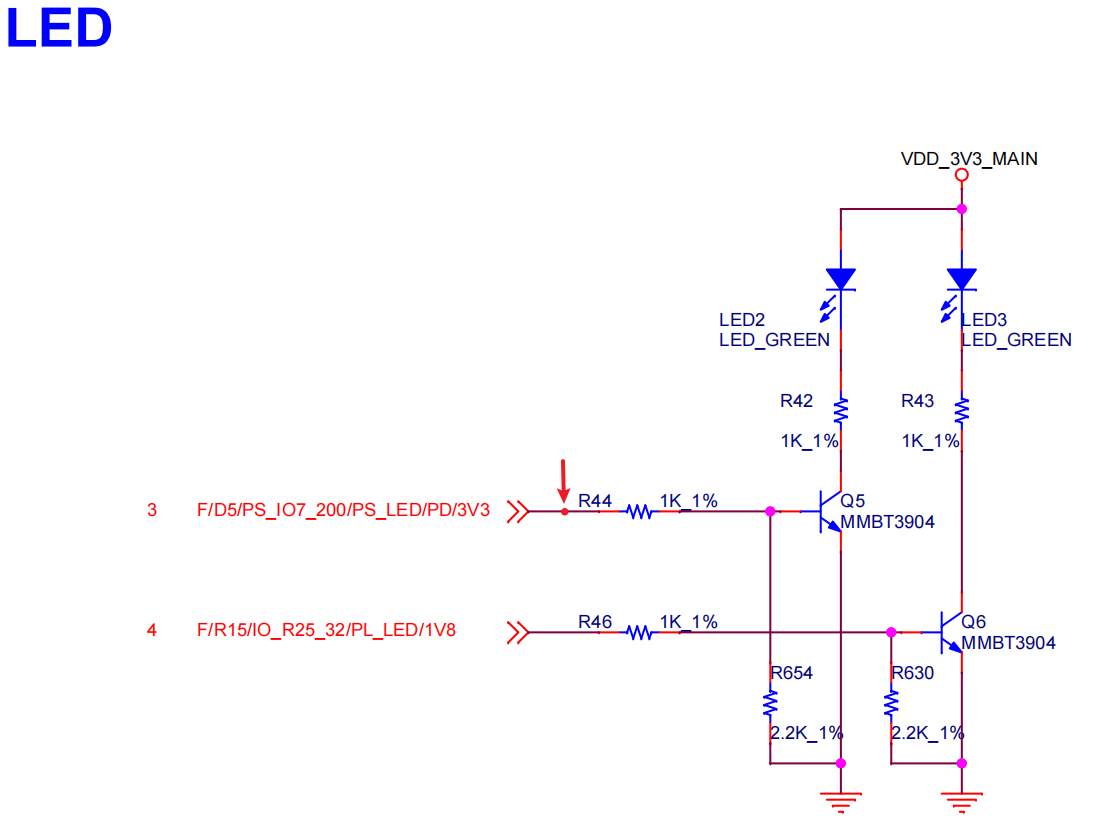 图 40
图 40
本次测得电平翻转周期为∆x = 108us,如下图所示。由于程序中默认增加了100us的时间延时,因此实际延时应为:108us - 100us = 8us,与程序统计打印的Latency results平均值相近。
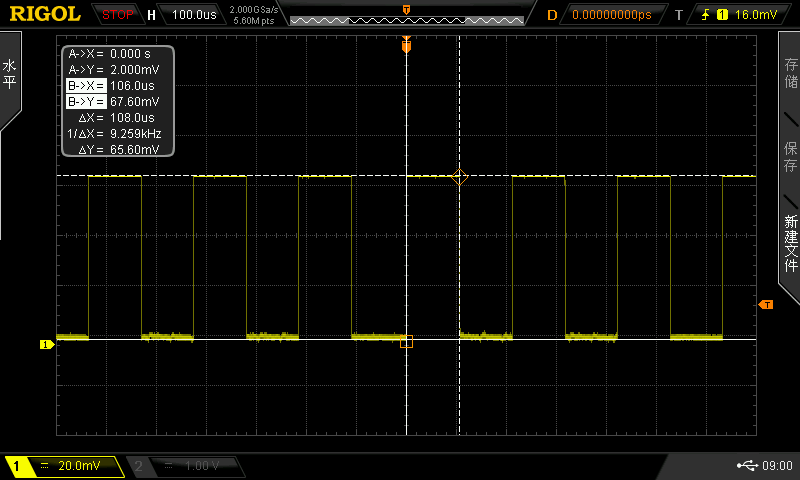 图 41
图 41
执行如下命令,指定程序以增加0us的时间延时运行,再按"Ctrl + C"退出测试,串口终端将打印程序统计的延迟数据,如下图所示。
Target# ./rt_gpio_ctrl -t 10 -d 0
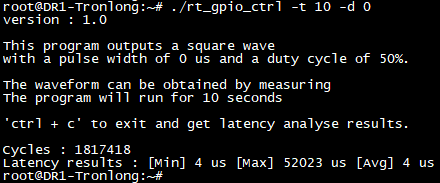 图 42
图 42
同时使用示波器捕捉LED两次电平翻转之间的间隔,即可得到线程调度的延迟,测试点为R44电阻一端。本次测得电平翻转周期为∆x = 5.3us,如下图所示。既实际延时为:5.3us,与程序统计打印的Latency results平均值相近。
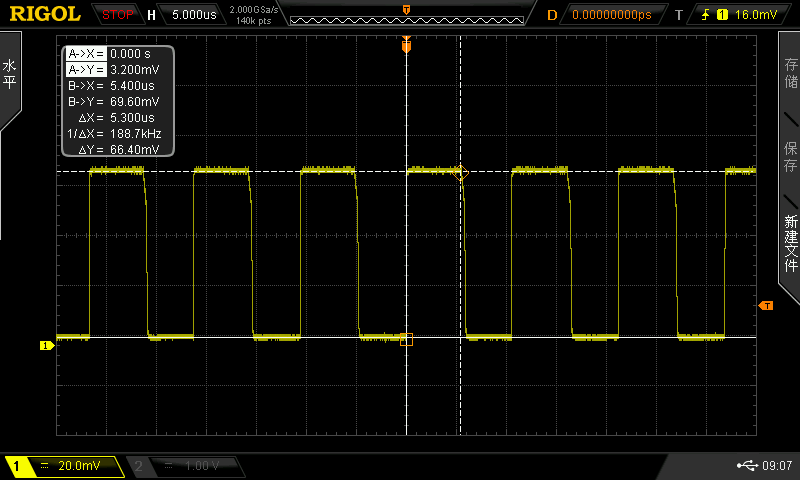 图 43
图 43
案例编译
将产品资料“4-软件资料Demolinux-rt-demosrt_gpio_ctrl”案例源码拷贝至Ubuntu。进入案例源码目录,执行如下命令,编译案例生成可执行文件。
Host# make CC=aarch64-linux-gnu-gcc CXX=aarch64-linux-gnu-g++
 图 44
图 44
关键代码
(1)创建实时任务,具体操作包括内存锁定、线程堆栈内存设置、调度策略和优先级配置等。
 图 45
图 45
(2)在线程中打开LED文件节点,并对LED状态进行翻转。
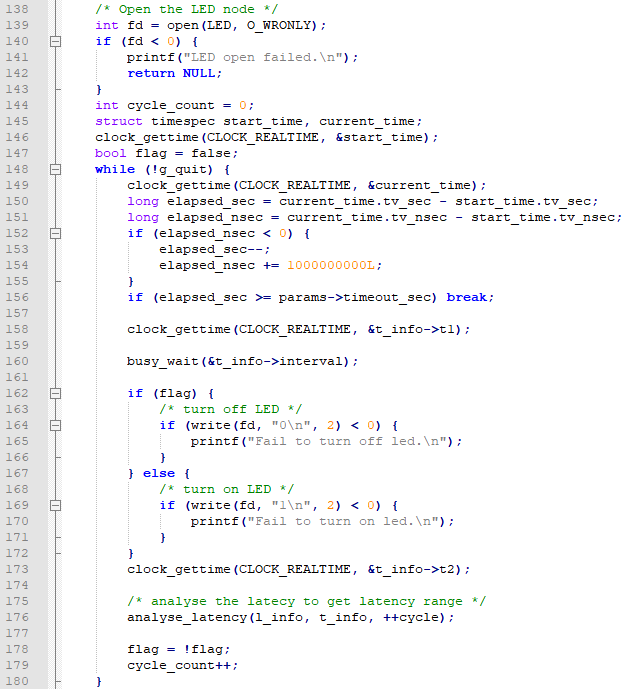 图 46
图 46
(3)统计调度时间延时情况。
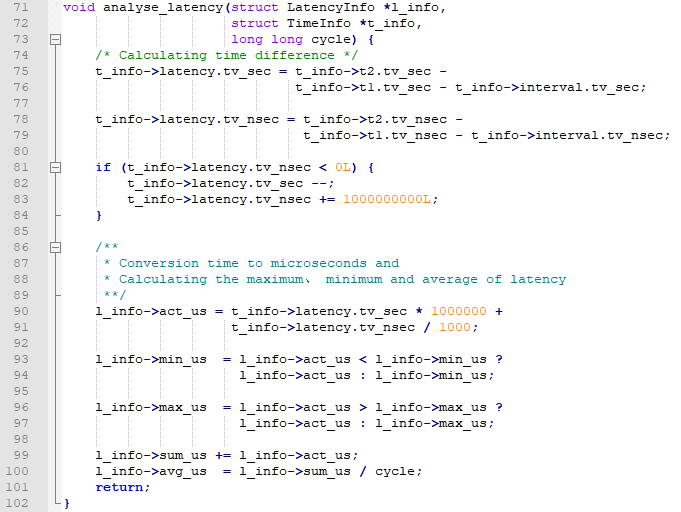 图 47
图 47
rt_input案例
案例说明
通过创建一个基本的实时线程,在线程内打开input设备,并对按键事件进行监听,然后触发LED的电平翻转,再通过示波器测量按键触发到LED电平翻转期间的实际耗时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中对打开的input设备节点进行按键事件监听,通过判断监听得到的按键事件来触发LED的电平翻转。
案例测试
执行如下命令,查看用户输入按键对应的事件号。其中USER1(KEY2)对应的按键事件号为event0。
Target# cat /proc/bus/input/devices
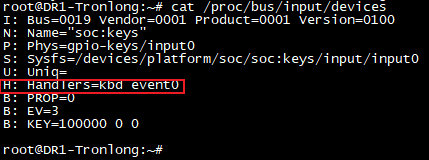 图 48
图 48
将案例bin目录下的可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序。程序运行后按下USER1(KEY2)用户输入按键点亮LED,松开按键后LED熄灭,再按"Ctrl + C"退出测试程序。
Target# ./rt_input /dev/input/event0
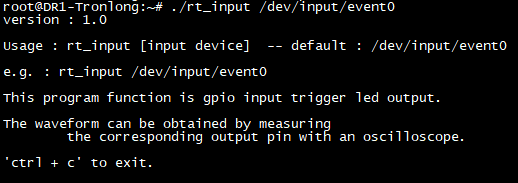 图 49
图 49
同时分别使用示波器探头1测量LED电路R44电阻一端,使用示波器探头2测量按键USER1(KEY2)引脚1。
图 50
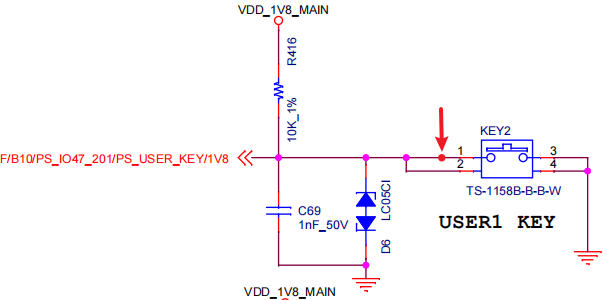 图 51
图 51
从按键下降沿触发的开始(下图蓝线)到LED上升沿触发的完成(下图黄线)的时间间隔,即为系统实时捕获按键输入时间并响应触发LED电平翻转的时间∆x,从图中可看到∆x = 138us。
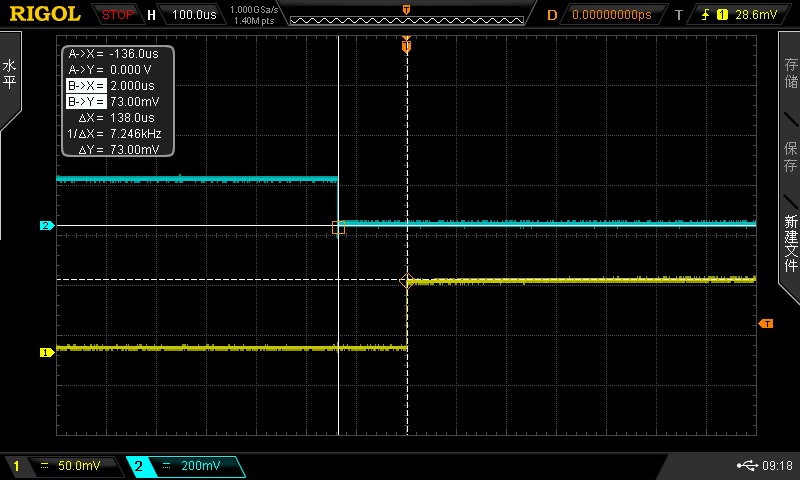 图 52
图 52
备注:在硬件特性上,由于按键电压由低电平上拉到高电平比较缓慢,因此本次测试实时事件的输入采用下降沿触发方式。
案例编译
将产品资料“4-软件资料Demolinux-rt-demosrt_input”案例源码拷贝至Ubuntu。进入案例源码目录,执行如下命令,编译案例生成可执行文件。
Host# make CC=aarch64-linux-gnu-gcc CXX=aarch64-linux-gnu-g++
 图 53
图 53
关键代码
(1)创建实时任务,具体操作包括内存锁定、线程的堆栈内存设置、调度策略和优先级配置等。
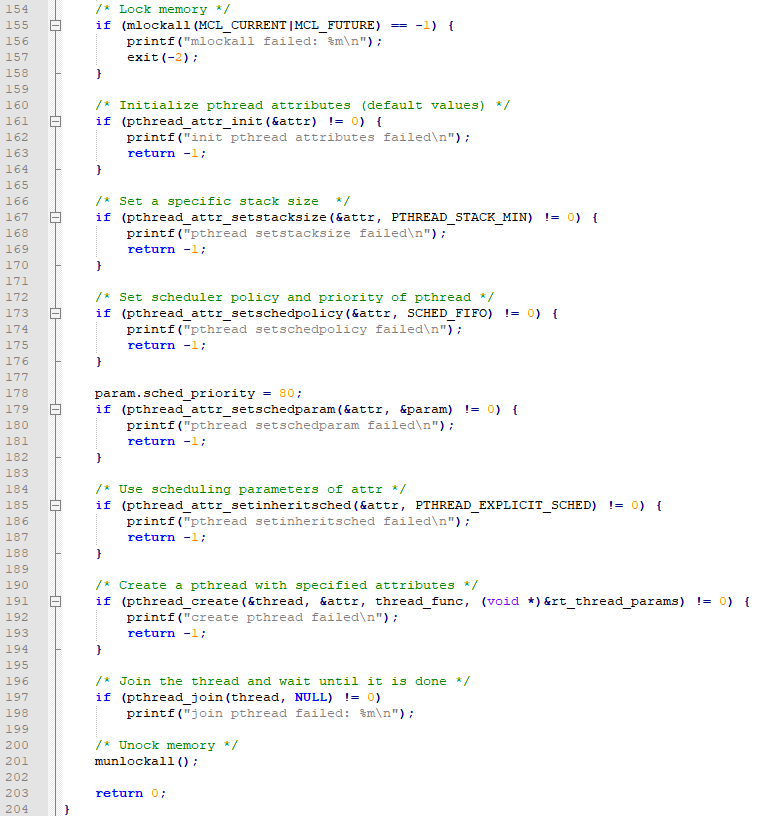 图 54
图 54
(2)在线程中打开input设备节点并监听按键事件,同时触发LED电平的翻转。
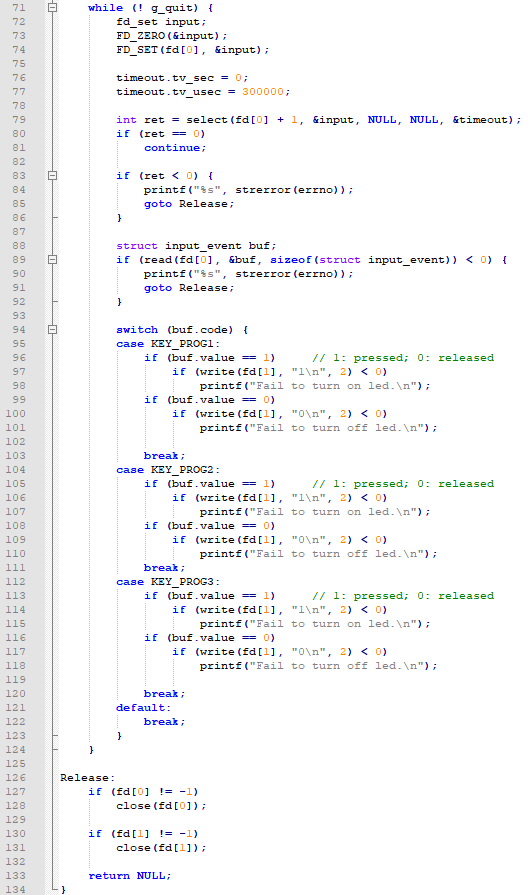 图 55
图 55
-
RK3562 单板机 Linux-RT 系统开发指南:内核配置、实时性优化与案例详解2026-02-10 18690
-
DR1M90 开源 IgH EtherCAT 主站案例:伺服电机正反转实时控制方案2026-01-04 3758
-
Linux-RT特点及简单应用2025-12-05 198
-
基于 DR1M90 的 Linux-RT 内核开发:从编译配置到 GPIO / 按键应用实现(1)2025-12-02 1495
-
基于安路DR1M90 FPSoC的Linux系统全流程开发指南(4)2025-11-30 2470
-
基于安路DR1M90 FPSoC 的Linux 系统全流程开发指南(3)2025-11-26 548
-
基于安路DR1M90 FPSoC 的Linux 系统全流程开发指南(1)2025-11-25 598
-
安路DR1M90评估板:从基础外设到通信模块测试指南2025-11-20 1890
-
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—Linux-RT应用开发案例2025-09-25 982
-
创龙科技DR1M90工业评估板的关键优势2025-08-18 1837
-
米尔国产FPGA SoC芯选择,安路飞龙DR1M90核心板重磅发布2025-01-10 2826
-
实测14us,Linux-RT实时性能及开发案例分享—基于全志T507-H国产平台2024-04-18 2203
-
全志A40i开发板——Linux-RT内核应用开发教程(2)2022-04-19 1955
全部0条评论

快来发表一下你的评论吧 !
