

通过采用超声波和PSD红外探测设计智能语音导盲器
描述
引言
我国是世界上盲人最多的国家,约有900万视力残疾者,占全世界的盲人总数的1 5 左右,每年会新增盲人45万,即约每分钟增加一人。完全失明的盲人,在行动引导方面遇到了很大的困难。传统的手杖无法及时地告知盲人前方障碍物的具体位置。因此,一种廉价实用的智能导盲器的意义重大。
本文设计了一种以超声波测距和PSD 红外测距为核心的智能语音导盲器。利用STC12C5A60S2 单片机循环采样,ISD1700 语音芯片作语音提示,实现导盲提示的功能。本设计着重于解决使用者对前方障碍物的感知,因此本设计的超声波探测器探测方向,随使用者头部指向变化而变化,与使用者头部指向完全一致,且探测距离为5 m.通过耳机向使用者报数,精确到百分位,实现方向与距离的精确指示。
1 系统结构
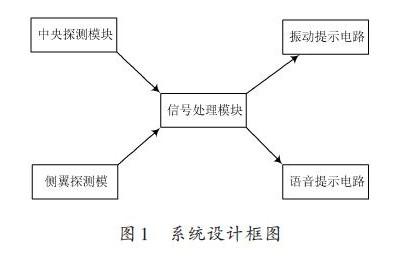
如图1 所示本设计由探测,处理,提示3 大部分组成。其中探测模块由中央探测和侧翼探测2个部分组成,探测模块所输出的信号发送给STC12C5A60S2单片机,通过A/D转换、判别并通过语音芯片和震动器作距离提示。
2 探测模块
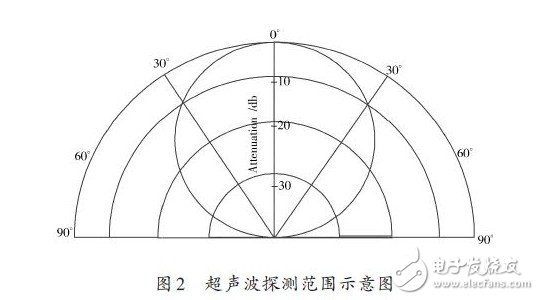
本设计中央探测模块使用超声波探测,其测距原理为超声波装置发射超声波并接受反射回波,通过两者时间差t,利用公式d = v0 t /2 计算距离,d 为超声波发射装置与障碍物的距离;v0 为声波在介质中传播的速率探测范围可达4~500 cm,探测角约为30°(见图3),分辨率达1 cm,误差少于1%,探测距离以数字量的形式通过TTL 模式和单片机通信,因此完全可以满足探测精度。探测范围如图2所示。
本设计侧翼探测模块使用红外测距传感器探测。
该探测器采用三角测量原理(如图2所示),可以测得装置到障碍物的距离(20~150 cm),探测角15°(见图3),距离以模拟量输出,经单片机A/D 转换后,根据需要设置多重范围报警。本设计的3个探测器将分别负责3个方向的探测,角度设置如图3所示。
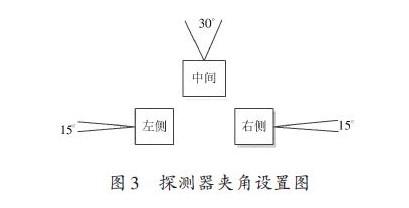
中间的探测器指向正前方,左右两边的探测器中线各与中线成90°角,这样就可以组成一个可以探测前半球180°的模组。
红外测距传感器三角测量原理:激光三角法测距的基本原理是基于平面三角几何。其方法是让一束激光经发射透镜准直后照射到被测物体表面上,由物体表面散射的光线通过接收透镜会聚到高分辨率的光电检测器件上,形成一个散射光斑,该散射光斑的中心位置由传感器与被测物体表面之间的距离决定。而光电检测器件输出的电信号与光斑的中心位置有关。
因此,通过对光电检测器件输出的电信号进行运算处理就可获得传感器与被测物体表面之间的距离信息。
为了达到精确的聚焦,发射光束和光电检测器件受光面以及接收透镜平面必须相交于一点。
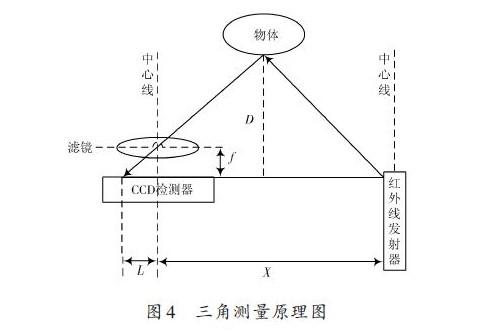
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,测量示意图如图4 所示。
反射回来的红外光线被光感应板检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度α,偏移距L,中心矩X,以及滤镜的焦距f 以后,传感器到物体的距离D 就可以通过几何关系D= fX/ L 计算出来了。当距离D 足够小时,L 值会相当的大,超过光感应板的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体的距离D 很大时,L 值就会很小,这时光感应板能否分辨出这个很小的L 成为关键,也就是说光感应板的分辨率决定能不能获得足够精确的L 值。要检测越是远的物体,光感应板的分辨率要求就越高。
3 信号处理模块
本设计选用了自带A/D转换的STC12C5A60S2单片机作为主控模块,与ISD1700语音芯片通过SPI数据总线连接和通信[7],如图5所示,振动电路如图6所示。单片机通过SPI总线直接控制ISD1700语音芯片,输出预先录制好的语音片段。
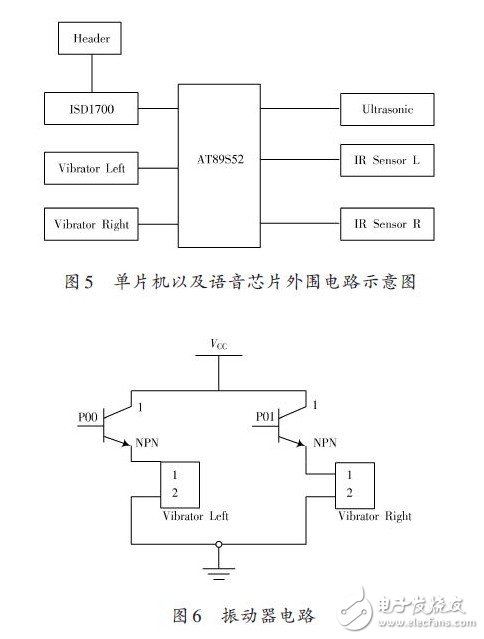
本设计单片机的处理流程图如图7所示。
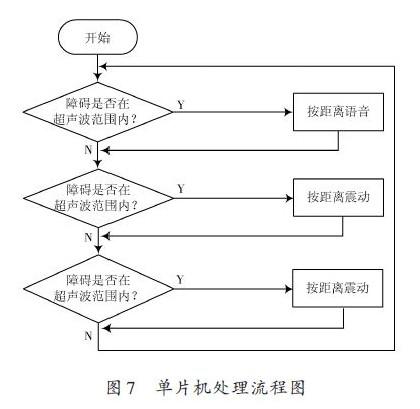
如图7探测模式如下,探测器模组将以中左右依次探测及报警。由于超声波所测距离很短,红外探测器发射和接收信号时间极短,单片机时钟频率也有12 MHz,其探测延时极短,因此,这种执行方式对人判别障碍物没有影响。
4 声音报警模块
本设计的报警提示将以一定时间间隔以振动频率/语音连续提示。超声波测距器所探测到的距离将以语音的方式提示使用者,形式为X.XX m,精确到百分位。
红外探头则将20~150 cm分为两段,即20~70 cm和70~150 cm.第1个区间震动器将在1 s内振3次,第2个区间在1 s内振1次以分清距离,如图8所示。

5 系统工作过程简述
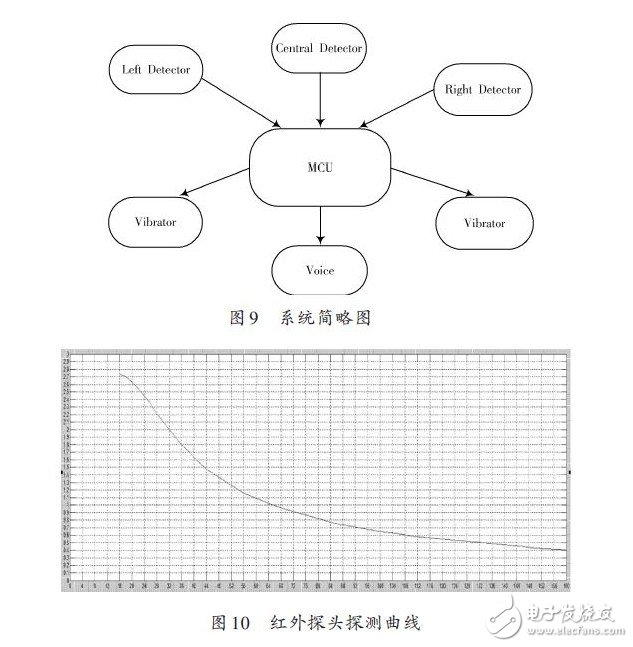
系统的简略图如图9 所示。如图5 所示,IR、US 分别为红外探测器和超声波探测器。分别负责左、中、右的探测。IR 根据所探测的距离输出相应模拟量,距离与信号大小对应关系如图10所示。
如图5所示,负责正中间探测的超声波探测器探测距离为4~500 cm,单片机的P10(RXD),P11(TXD)与超声波探测器的TXD,RXD 相接并通过这两个端口信。超声波探测器(Ultrasonic)将数据输入单片机,单片机进行判别后,通过P2.4~P2.8的SPI总线接口发送指令给语音芯片,语音芯片根据接收到的指令将预先录制好的语音(一、……九、零、米、前方距离)按照一定排序输出到耳机(以X.XX m的方式,精确到百分位),提示使用者。另外,还可以通过自定义键,令语音芯片播放当前温度的语音。
负责左右两边的红外探头(IR Sensor)探测范围20~150 cm,其信号线与单片机的P1.0,P1.1 相连,红外探头所探测到的距离以模拟量输出,经单片机内部A/D转换后判别,并输出相应脉冲给P0.0,P0.1口,使三极管导通,从而使振动器振动(图6)。
如图5所示,语音芯片的P4~P7口接收到单片机指令后,将相应语音按一定排序,通过P17 AUX端口输出到耳机,实现语音提示。
6 系统测试
首先,对硬件电路进行电气检查,排除电路出现短路等故障发生的可能性;其次,首先进行仿真测试,超声波探测器通过RS 232接口连接到电脑(见图11),利用专用软件,进行软件测试,如图12,图13所示。;最后进行实际测试。


(1)测试报警系统能否实现预期功能测试环境:白天实验室内,温度约30 ℃。首先,烧入以5 s为一个循环的单片机程序。经测试,系统首先以语音报出“前方距离X.XX m”,而后左右振动器依次按所测距离震动,以5 s为一个循环,不断间断地报数/振动作提示。
其次,烧入另一组程序,通过两个不同的自定义键,实现语音报数,例如:“前方距离3.74 m”,“29.74 ℃”,实现预期功能。(2)报警系统工作的稳定性系统连续开机2 h,每隔15 min,检查系统一次,系统长时间开机后仍能正常工作。
7 结论与展望
本设计实现了多重距离探测,多向距离探测和多重报警语音提示的功能。在设计过程中,坚持小型、快速、实用、智能的思想,尽可能地实现更多的功能。为此,选定探测距离为4~500 cm 的超声波探头和20~150 cm 的红外探头做多重距离提示。
目前国内外的导盲器都是采用比较成熟的超声波测障,而更人性化的导盲器会具有图像处理系统或者GPS定位系统。本设计在正面探测仍采用成熟的超声波,并以一定向下的倾角,探测地上障碍物,作为取代导盲杖的一种尝试。用红外探头作左右两边的探测,使装置成本大幅下降,且体积小功耗低。本装置成本合理,而具有图像处理系统或者GPS定位系统的导盲器价格很高。因此本设计有一定实用价值。
-
超声波接近探测器2011-10-16 0
-
基于STM8的红外与超声波测距仪设计2011-11-09 0
-
基于超声波传感器的自主移动机器人的探测系统2012-01-19 0
-
基于超声波传感器的自主移动机器人探测系统2018-11-02 0
-
怎样去设计基于单片机的红外超声波避障导盲仪2021-07-19 0
-
如何采用STC89C52单片机实现超声波红外避障语音导盲仪设计2021-11-10 0
-
超声波导盲器的设计2009-08-07 672
-
基于超声波传感器的导盲杖设计2012-09-12 1162
-
单片机导盲杖两路超声波测距报警设计2017-06-18 1505
-
红外测距和超声波测距对比有什么优缺点2017-11-23 88939
-
超声波导盲仪设计原理是什么?超声波电子导盲手杖的设计资料概述2018-08-27 12242
-
如何自制超声波智能导盲杖2019-05-27 4295
-
基于51单片机超声波红外避障语音导盲仪设计(全套资料)2021-11-05 895
-
基于单片机的红外超声波避障导盲仪-GSM短信(毕业课设资料)2021-11-23 627
全部0条评论

快来发表一下你的评论吧 !
