

免费获取 | SimData高保真虚拟数据集开源发布,兼容nuScenes,开箱即用!
描述
尊敬的行业伙伴:
在自动驾驶技术的迭代进程中,高质量数据集是驱动感知算法突破的核心要素。然而,真实道路数据采集面临着成本高、标注周期长、极端场景覆盖率低及安全约束严格等行业痛点,已成为制约研发效率的关键瓶颈。
在此背景下,基于高保真仿真技术构建的SimData自动驾驶虚拟数据集,以“低成本、高保真、场景全”的核心优势,为行业提供了高效的解决方案。
为此,康谋依托自身技术积淀打造了开源的优质数据集,文末可免费获取,后续还将推出详细数据集介绍及评测报告文章,欢迎持续关注!
数据集简介
SimData是基于aiSim高保真仿真平台生成的专业自动驾驶数据集,通过康谋专属aiSim2nuScenes自动化工具,实现了与经典真实数据集nuScenes的“无缝对接”——无论是视觉、雷达还是激光雷达等多源传感器数据,都能一键转换为nuScenes兼容格式,直接适配各类主流感知模型的训练与测试需求。
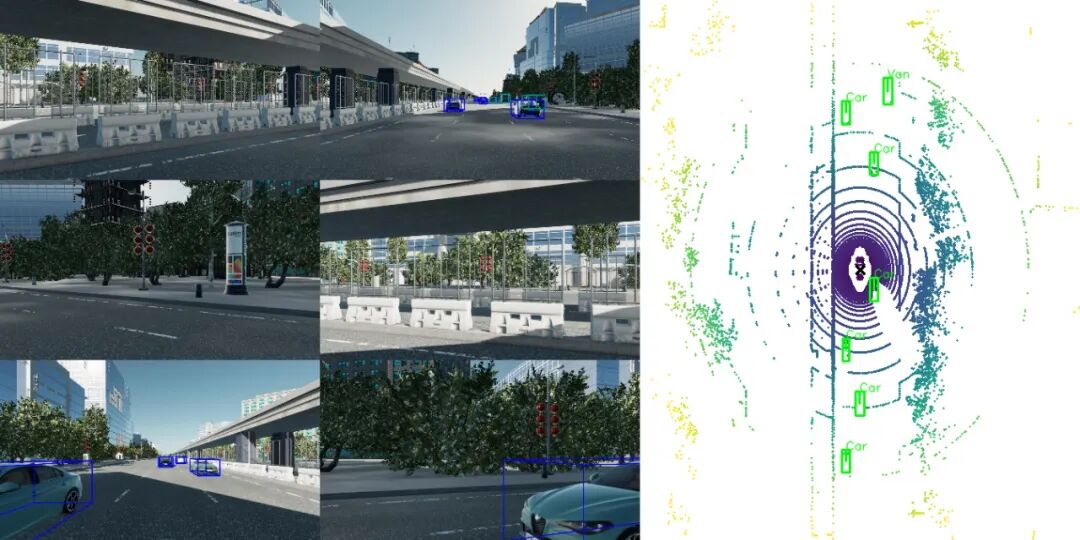
当前版本数据集含15类地图、45个细分场景(覆盖高速、城区、环岛、停车场等),涵盖Car、Van、Pedestrian等10类交通参与者,单相机数据超18000帧,采用“每10帧抽1关键帧”策略提升利用效率。数据已完成图像TGA格式转JPG、雷达LAS格式转BIN等全自动化处理,符合nuScenes数据格式,开箱即用。
后续我们还会不断更新,添加更多场景和素材,欢迎持续关注!
数据集价值
经实际验证,SimData数据集在性能真实性、场景泛化性与研发经济性三大维度体现了极高的价值。
性能贴近真实,训练成果可靠:基于BEVFormer测试显示,SimData训练模型的mAP达0.446、NDS达0.428,性能与nuScenes真实数据训练结果高度趋近。其跨域迁移能力突出:虚拟数据训练的模型可适配真实场景,真实数据训练的模型无需适配即可处理SimData,核心类别检测精度偏差小于5%。
提升泛化能力,突破数据局限:以真实数据模型为基础,经SimData微调后,模型泛化能力可提升15%以上。同时,它能灵活生成暴雨、施工、连环追尾等极端场景数据,突破真实采集的时空与安全限制,为算法鲁棒性优化提供关键支撑。
大幅降低成本,提升研发效率:相较于传统真实数据采集,SimData可使数据获取成本降低60%以上。全自动化处理与nuScenes兼容特性,无需额外开发适配,助力研发团队快速启动模型训练,缩短算法迭代周期。
现扫码添加专属小助手,即刻获取SimData数据集完整资源包!为您的感知模型训练与测试工作提供高保真数据支撑,加速算法迭代进程!
此外,为帮助大家充分发挥SimData的价值,我们后续将推出深度文章,从技术细节到实践应用全面拆解,系统性介绍了从 仿真数据导出 → 自动化格式转换 → 数据集结构构建 → 感知模型训练与评测的完整流程!敬请期待,欢迎持续关注康谋自动驾驶公众号!
▍关于康谋科技
康谋是一家自动驾驶解决方案供应商(前身是虹科自动驾驶事业部)。
我们以数据为驱动力,提供高性能的数据采集、记录、传输方案,针对各种驾驶场景进行精准的仿真模拟,以及对大量自动驾驶数据进行高效、高质量处理。我们的一站式服务能够满足自动驾驶领域研发测试的全流程需求。
通过深入了解客户需求,结合行业最新技术和趋势,我们致力于为客户提供最适配的自动驾驶解决方案,助力客户在自动驾驶领域取得更大突破。
-
SimData深度解析:高保真虚拟数据集的构建与评测2025-12-12 2628
-
SimData:基于aiSim的高保真虚拟数据集生成方案2025-11-07 5619
-
USB高保真耳机放大器开源分享2022-08-10 729
-
7297 4558高保真低音增强2022-07-26 727
-
Motional发布了扩展版本的NuScenes自动驾驶数据集2020-09-05 2083
-
高保真音响设计制作资料2012-08-20 11766
-
高保真胆机制作详解2012-02-14 13510
-
高保真音响实用全书2011-07-23 5504
-
什么是高保真耳机2010-10-09 1653
-
高保真扬声器系统设计的探索2010-04-22 2062
-
什么是高保真?2009-05-04 13451
-
高保真音响设计制作2008-08-20 3329
-
[图文]高保真调频调谐器2006-04-15 5532
全部0条评论

快来发表一下你的评论吧 !
