

RTK GPS定位技术在道路驾驶技能自动化考试系统中的应用
描述
引 言
随着社会进步,机动车保有量越来越多,汽车成了普通人的代步工具,参加驾驶员培训、准备拿驾照的人越来越多,为规范驾驶员培训,有必要研制开发一种能对驾驶员的驾驶技能和安全意识进行科学、规范测试的自动化考评系统。
现在,驾驶员拿驾照前要通过实际道路驾驶技能考试(科目三考试),即驾驶员在考试时要驾驶考车在3~5km的实际道路上完成上车准备、起步、直线行驶、变更车道、通过路口、通过人行横道线、学校区域、通过公共汽车站、会车、超车、靠边停车、掉头、夜间行驶和综合评判共计14个考试项目,其中需要检测考车相对于道路边缘线、道路中间线、路口停车线、车道分割线的距离,以及检测直线行驶、掉头等考试项目是否合格。
本文研制的一种驾驶员实际道路驾驶技能自动化考试系统采用RTK GPS定位技术,能对考车在实际道路上的位置进行动态定位和测距,其精度可以达到"厘米"级,很好地满足了系统对考车定位和测距的高精度要求。
1 载波相位实时动态差分技术(RTK)定位原理
采用RTK GPS定位技术对考试车辆在道路上的位置进行动态定位,其系统组成通常包括三部分:基准站,移动站(考车)和通信单元。基准站通常设置在考试道路附近的建筑物上或路边立杆上,移动站安装在考试车辆上,通信单元用于实现基准站和移动站之间的数据通信,如图1所示。基准站实时接收GPS卫星信号,其伪距的载波相位观测量见公式(1),并将观测量以广播的形式发送出去;移动站(考车)实时接收GPS卫星信号,其伪距的载波相位观测量见公式(2),同时接收基准站发送的载波相位数据,进行组差解算,其伪距观测方程见公式(3),通过计算得到厘米级的考车定位坐标。

式中:Nir,o,Nip,o是整周模糊数;Ni r,Nip是从初始历元开始至观测历元间的相位整周累积数;Φi r,Φip是测量相位的小数部分;λ是载波波长,L1载波波长是19cm,L2载波波长是24cm.
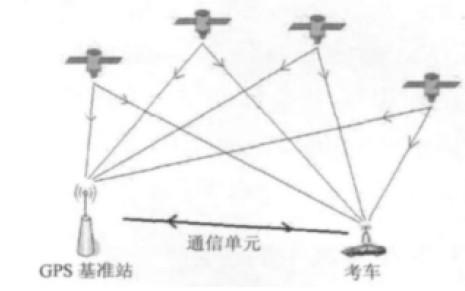
图1 原理组成

式中:Δ-ρ是同一观测历元的各项残差之和。
在使用RTK GPS定位技术对考车位置进行精确测量时,整周模糊数的正确求解是获得高精度考车定位位置的必要条件。求解整周模糊数采用整数最小二乘理论,即首先利用最小二乘法求出浮点解,再通过快速搜索算法在整数约束条件下求出整周模糊数,最后得到固定解。在本道路考试系统研制时,为了实现对考车行驶过程中的实时定位,采用组合波宽巷处理技术对整周模糊数求解,工作时采用双频GPS接收机,利用常规码载波相位差分测量,得到一个整周模糊度的近似估值,然后对伪距噪声及多路径效应进行平滑,减少整周数的搜索个数,最后根据双频信号,通过两种波长(巷宽)的线性组合,可以得到一个宽巷的巷宽。
GPS的二个载波信号:f1=1 575.42 MHz,波长λ1=19cm;f2=1 227.60MHz,波长λ2=24cm,通过公式(4)的计算得到一个宽巷波长λ 宽为86cm 的巷宽。

宽巷的波长比单频的波长大4倍,利用宽巷极易在估值范围内求出巷宽的整周模糊数,再利用f1和宽巷参数间的线性关系求出f1和整周模糊数。该方法求解速度快,一般只需要几秒到十几秒就可以快速求解出整周模糊数。在本道路考试系统中,考车行驶时受树木、建筑物、桥梁和山峰等障碍物影响会出现"周跳"误差,导致定位精度变差,考车驶出遮挡物的影响区域后,在不到10s的时间内就可以消除"周跳"误差恢复到精确定位。
RTK GPS定位系统工作时,基准站需要把观测得到的载波相位信息实时传送到考车上的移动站,为保证考车定位信息的高精度,要求数据传送的误码率小于10-7,差分信息的更新时间不高于10s,这对基准站和考车之间的无线通信单元提出了较高的要求。
本道路自动化考试系统研制时,利用满足IEEE 802.11a/b/g协议要求的无线基站端、无线客户端设备(AP)组建一个能在控制中心(基准站)和考车(移动站)之间实现音频、视频、数据通信的无线局域网来传送基准站观测的载波信息到移动站,很好地满足了RTK GPS定位系统中对数据链通信的要求;该通信单元也可以利用中国联通、中国电信提供的3G业务平台组建一个虚拟专网(VPN)来实现。
2 在驾驶人道路考试中的应用
在道路考试中需要准确检测出驾驶人驾驶的考车与道路上其他考车、路边物体、道路边缘线、道路中间线、路口停车线、车道分界线等之间的距离,以此判断考车在行驶时是否与其他车辆、物体保持适当的安全距离,是否把考车停在指定区域;如此,要先确定考试区域的参考坐标和相关的地理信息数据。
2.1 道路考试区域坐标系的建立
以RTK GPS基准站(天线)位置作为三维坐标系的原点,东西向、南北向和高度分别作为x,y,z 轴,如图2所示,把考试区域半径(3~5km)内的道路信息、标志标线信息、路边物体信息通过精确测绘得到其坐标,或用相关的直线方程式表示,道路上的曲线用折线来近似代替。
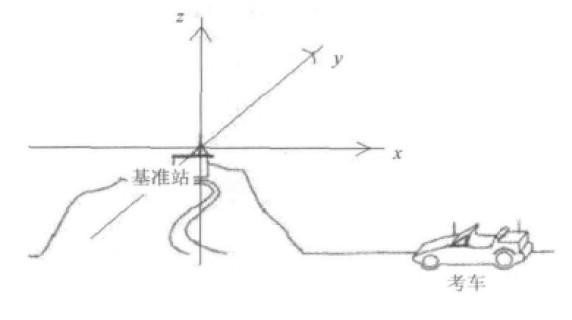
图2 道路考试区域坐标系。
2.2 考车之间距离的检测
考车甲在道路上考试,其位置可以通过RTK GPS定位系统实时获得,假设为P(Xi,Yi,Zi),另一在道路上考试的考车乙的位置实时检测为Q(Xj,Yj,Zj),考车乙的位置经考试系统中的通信单元传送到考车甲,则二车之间的距离D 通过公式(5)可以计算出:

实际上,考车是用一个立方体来近似模拟的,并投影到大地平面作为一个长方形来处理。RTK GPS定位系统得到的是安装在考车车顶GPS天线的坐标,对于确定的车型可以进一步推导出考车右前端(Xjrf,Yjrf,Zjrf)、右后端(Xjrb,Yjrb,Zjrb)、左前端(Xjlf,Yjlf,Zjlf)、左后端(Xjlb,Yjlb,Zjlb)四个点的坐标;考试时,若二车同向行驶,检测其前后端点之间的距离;若超车,检测超车考车右前端点与被超考车左后端点之间的距离;若二车相向行使,会车时检测二车左前端点之间的距离;图3给出了二车交会时的检测软件流程图。
2.3 考车与道路标线间的距离测量
考车在道路上考试,其与道路上各种交通标线的位置需要实时检测得到,以确定考车是否按规定正确行驶,考车的位置P(Xi,Yi,Zi)通过RTK GPS定位系统实时测得,道路上的各种交通标线可以用直线表示,曲线可以用折线近似表示,其直线方程在GPS差分基准站确定后通过精密测绘获得;在空间三维坐标系中,直线方程表示为:{A1x+B1y+C1z+D1=0,A2x+B2y+C2z+D2=0},若是线段可以加上约束条件[(x1,y1,z1),(x2,y2,z2)];直线方程系数A1,B1,C1,D1,A2,B2,C2,D2和开始点(x1,y1,z1)、结束点(x2,y2,z2)坐标通过实际测绘得到。
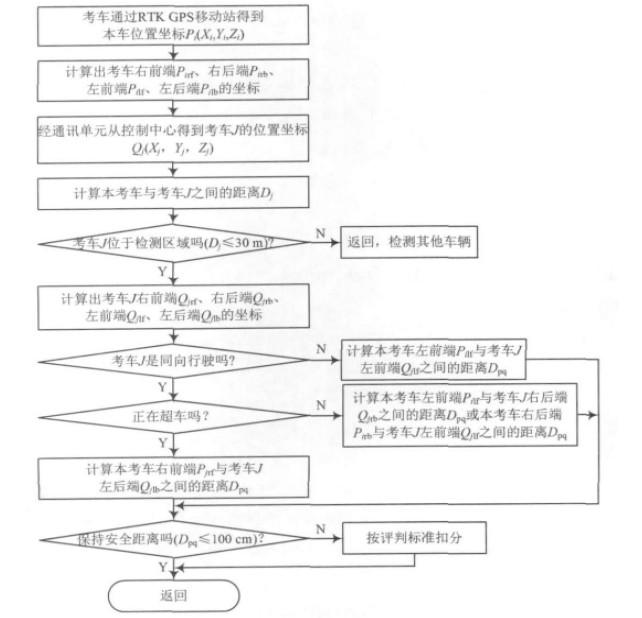
图3 检测二车交会过程的考试软件流程。
如此,考车P 到交通标线间的距离可以通过公式(6)计算得出,进而判断考车在道路上是否按交规正确行驶和停车,图4给出了考车在道路上"靠边停车"项目考试时的检测软件流程图。

式中:δ1 =A1xi+B1yi+C1zi+D1,δ2 =A2xi+B2yi+C2zi+D2,珗n1 = {A1,B1,C1},珗n2 = {A2,B2,C2}.
在检测考车与路边缘线之间的距离时,实际上检测考车右前端和右后端离路边缘线的距离,取其大者作为考车与路边缘线间的距离。此外,为减少计算量,通常在非道路立交处,考车与道路标线换算为二维平面坐标进行处理。
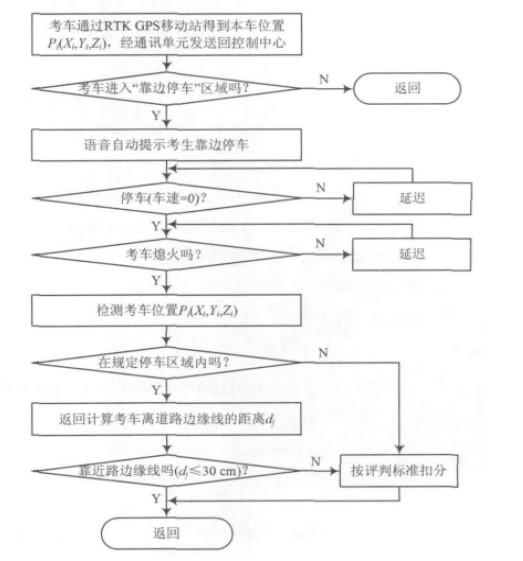
图4 检测"靠边停车"项目考试软件流程。
3 结 语。
RTK GPS定位技术为驾驶人道路考试时对考车位置的高精度、实时测量提供了很好的解决方案,在公安部规定的100项道路考试检测项目中,利用RTKGPS定位技术实现的自动检测项目达到35项,大大提高了整个考试系统的自动化考试程度,且保证了考试要求的检测精度和实时性要求。
采用RTK GPS定位技术研制成功的道路驾驶技能(科目三)考试系统减少了考试过程中人为因素对考试结果的影响,提高了道路考试评判的准确性、客观性和公正性,体现了考试过程的公正、公平、公开,对提高驾驶员的综合驾驶素质、减少道路交通事故起到了积极的推动作用;同时,道路自动化考试系统的使用实现了考试过程的自动评判和考试管理的计算机化、网络化,极大地解放了警力,实现了科技强警。
-
“厘米级”gps定位预计2018年面世,无人驾驶汽车新时代将来临2017-10-16 3317
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3294
-
自动驾驶汽车的定位技术2019-05-09 3504
-
UWB高精度定位在自动驾驶中的应用前景2020-10-26 2870
-
UWB定位可以用在自动驾驶吗2020-11-18 3677
-
新款上市华测RTK-华测GPS X7 X12 X6测量仪高精度GPS道路定点土石方放样2022-01-10 2728
-
GPS-RTK技术在水下地形测量中的应用2010-04-29 1096
-
GPS—RTK技术的使用2011-10-18 5407
-
基于GPS定位技术的驾考系统2017-12-08 1156
-
GPS RTK定位在驾考中的应用2017-12-22 1484
-
自动驾驶定位方式:RTK定位与激光融合定位2023-06-02 1063
-
apollo自动驾驶中的GNSS/融合定位技术2023-06-06 894
-
GPS/北斗RTK差分定位系统的原理以及应用领域2023-08-04 3546
-
“高精度”定位技术RTK,仅仅是差分GPS吗?2023-08-28 3059
-
GPS/北斗RTK差分定位系统的技术原理以及应用领域2024-09-27 4370
全部0条评论

快来发表一下你的评论吧 !
