

瑞芯微(EASY EAI)RV1126B MIPI-CSI摄像头
描述
1. MIPI摄像头简介
1.1 MIPI CSI2接口简介
MIPI (Mobile Industry Processor Interface):ARM, Nokia, ST ,TI等公司在2003年成立的一个联盟所定的接口。目的是把手机等移动设备内部的接口如:摄像头、显示屏接口、射频/基带接口等标准化,从而减少手机等移动设备设计的复杂程度和增加设计灵活性。
工作组(Work Group):MIPI联盟下有许多的工作组,不同的工作组负责定义对应设备的标准。其中包括有:Camera工作组、Display工作组、高速多端链接工作组等十几个工作组。
MIPI CSI-2接口是由MIPI联盟下的Camera工作组指定的CSI(Camera Serial Interface)的第2版接口标准。硬件层面:最大支持4个虚拟通道(Lane)传输数据,1个Lane在硬件上体现就是一对差分信号线(见下方原理图),每个Lane的最大通讯速率为2.0Gbps。软件层面:MIPI CSI-2协议栈主要由应用层、协议层、物理层组成,其中协议层又可以分为:像素/字节组包/解包层、底层协议层、通道管理层。
1.2 硬件接口资源介绍
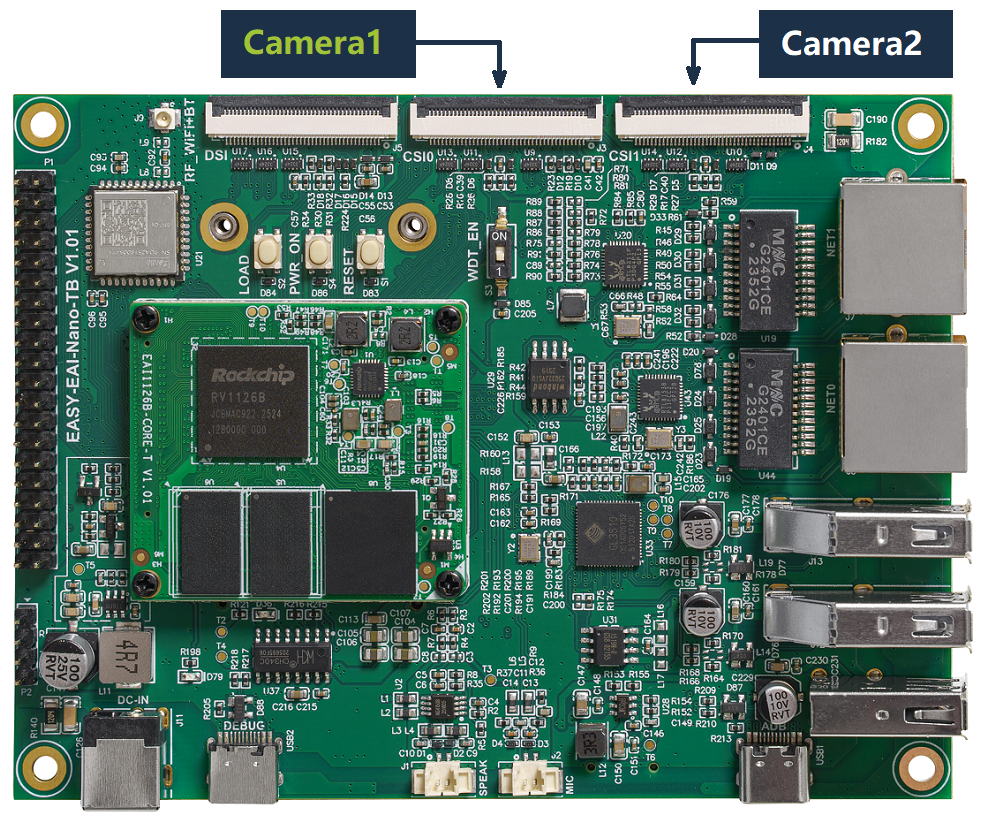
EASY EAI Nano-TB开发板具有2路MIPI CSI-2接口。每路引出了4个Lane。位置定义如下所示。
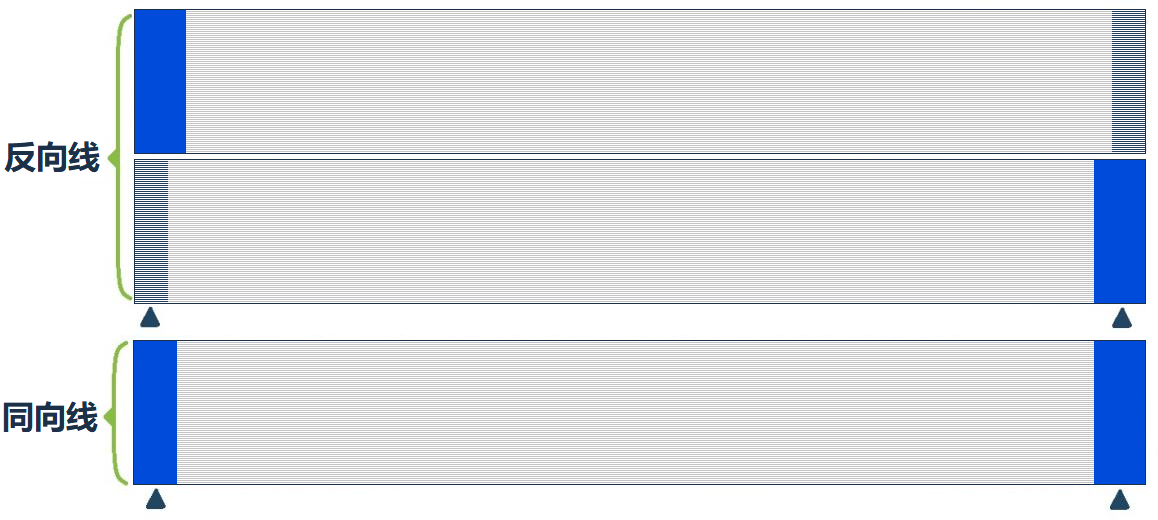
EASY EAI Nano-TB默认搭配IMX415单目摄像头。同时配有一根0.5mm间距的40pin FPC反向线。
反向线:两端的蓝色标识不在同一侧面。
同向线:两端的蓝色标识处于同一侧面。

1.3 接线说明
* 接线必须在断电时进行操作。
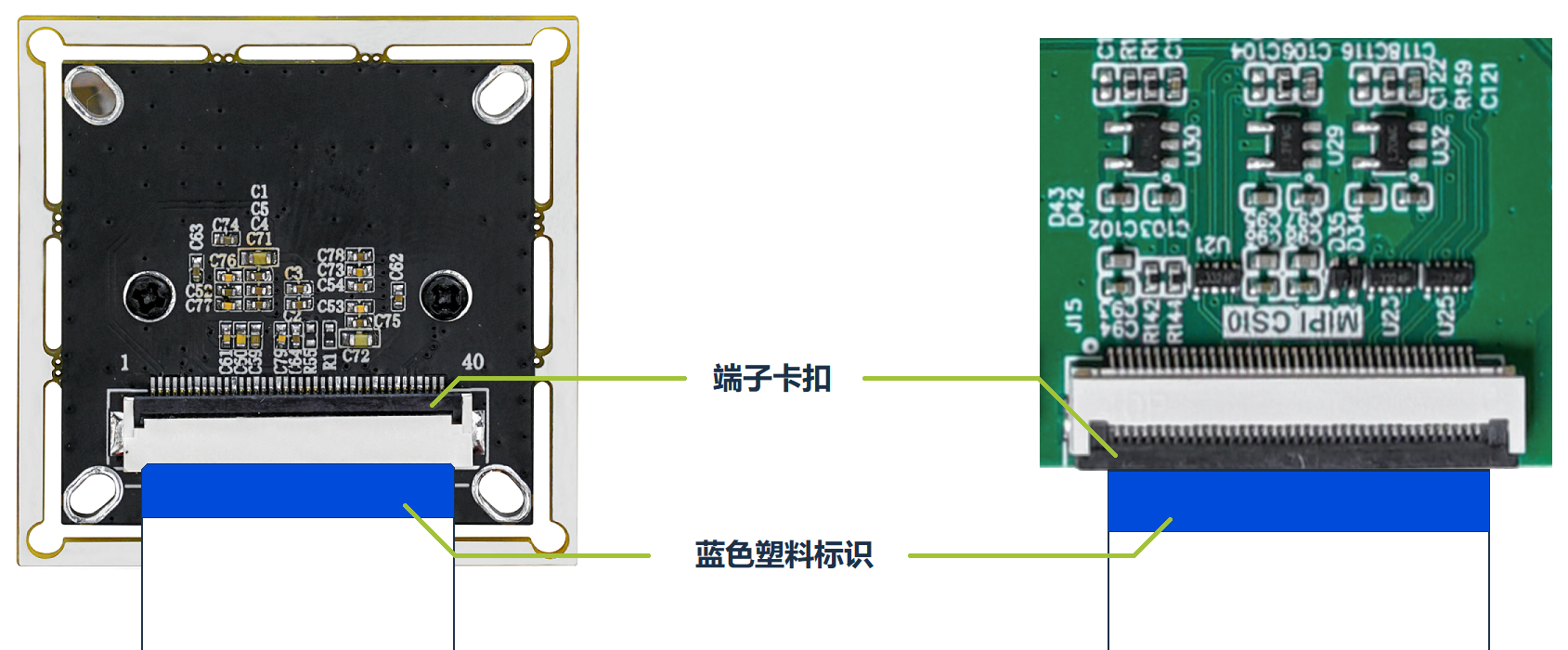
* 采用反向线连接IMX415摄像头与Cmaera1接口。(注意:用错线会烧坏摄像头或者核心板,因此在接线时务必要小心。)
* 接线端子卡扣与FPC线的蓝色塑料标识必须位于同一侧。如下图所示。
1.4 查看设备情况
可以通过dmesg命令,检查MIPI-CSI2接口模块是否正常工作。
dmesg | grep "csi2-.phy"摄像头正常挂载的情况如下所示。可以看到:
在dphy0接口上有一个sensor型号为:imx415的摄像头,MIPI-CSI2地址为:1-0036;
在dphy3接口上有一个sensor型号为:imx415的摄像头,MIPI-CSI2地址为:4-0036。

当没能出现目标camera节点时,就需要检查FPC排线是否正常连接,请检查排线的连接是否与“1.3接线说明”一致。
1.5 寻找可用的设备节点
rockchip平台,一个MIPI-CSI接口会对应20多个video节点(设备树定了就会生成这么多个),如下图所示。

注意:CSI0并不一定是对应着video0~24,这个要根据设备树的实际情况对应生成。
而且MIPI-CSI camera对应的节点,会在修改内核设备树的时候固定下来(即:内核配好了MIPI-CSI Camera个数,无论MIPI-CSI摄像头是否有接上,它的video节点情况都是不会根据MIPI-CSI Camera的接入情况而【动态】改变)。
因此,用户需要找到这些节点所对应的描述信息是什么。Linux的v4l2框架会把这些节点的描述信息统一放在/sys/class/video4linux/目录下,如下图所示。

随便进入一个描述,如video22。

通过cat命令,可以用查看这个name的内容是什么。rockchip芯片定义:如果这个name是mainpath或者selfpath。则这个“video22”就是可用节点。
在终端任意目录执行下面这条命令,可以快速扫描所有的节点的“name”描述。
grep "mainpath" /sys/class/video4linux/video*/name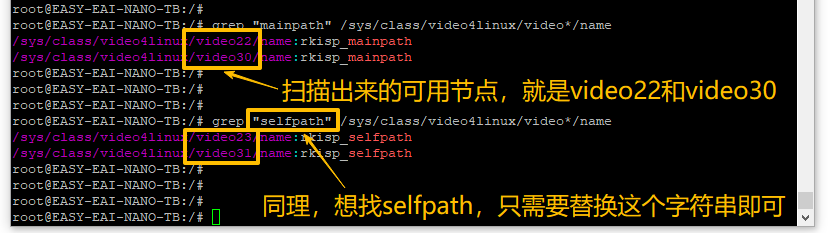
因此,/dev/video22和/dev/video23都是MIPI-CSI0的可用节点。
2. 快速上手
2.1 开发环境准备
如果您初次阅读此文档,请阅读《入门指南/开发环境准备/Easy-Eai编译环境准备与更新》,并按照其相关的操作,进行编译环境的部署。
在PC端Ubuntu系统中执行run脚本,进入EASY-EAI编译环境,具体如下所示。
cd ~/develop_environment
./run.sh 
2.2 源码下载以及例程编译
首先,在虚拟机后台终端,执行以下命令,创建外设单例源码管理目录:
cd /opt
mkdir -p EASY-EAI-Nano-TB/demo 首先,到【百度网盘】上下载相关的单例程序:
链接:https://pan.baidu.com/s/1Br608Hiff2Xs65PzWO_qWQ?pwd=1234
提取码:1234
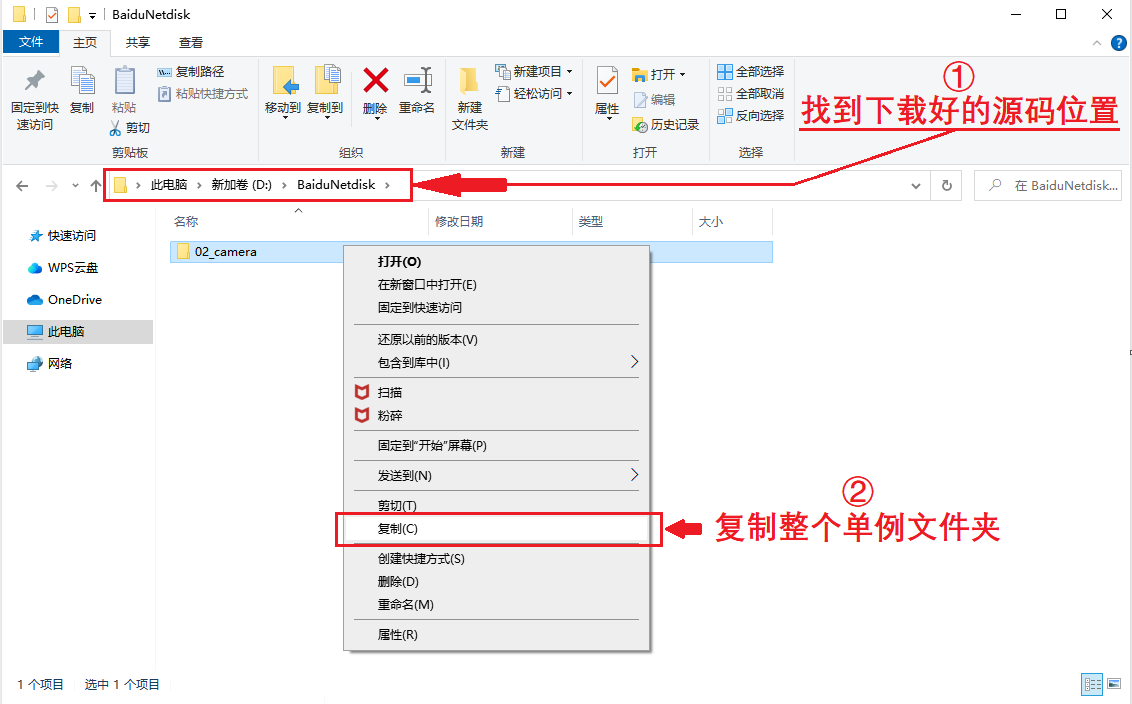
比如把单例程序下载到:此电脑\D:\BaiduNetdisk (无规定,用户可自主选择),如下图所示。

再将下载好的单例复制进入虚拟机的文件系统,过程如下图所示。


最后,进入到对应的例程目录执行编译操作,具体命令如下所示:
cd EASY-EAI-Nano-TB/demo/02_camera
./build.sh 注:
* 由于依赖库部署在板卡上,因此交叉编译过程中必须保持/mnt挂载。

2.3 例程运行
通过串口调试或ssh调试,进入板卡后台,定位到例程部署的位置,如下所示:
cd /userdata
运行例程命令如下所示:
./test-mipiCam 222.4 运行效果
执行效果如下所示。

例程运行完之后,会在/tmp目录下得到一张photo图片。回到虚拟机里,新开一个终端窗口,通过scp命令把图片拷回来:

然后把photo用mplayer命令播放出来,如下所示。
mplayer -demuxer rawvideo -rawvideo w=1920:h=1080:format=bgr24 photo -loop 0例程默认分辨率为1920x1080,故w和h的参数对应填入1920和1080。当出现图片异常时,说明分辨率等不太对应于手头的摄像头,所以需要调整mipicamera_init()的分辨率,例如1280x720。命令执行如下所示。

3. MIPI摄像头测试案例
示例代码路径为:02_camera/test-mipiCam/main.c。MIPI Camera API的测试案例代码逻辑流程如下所示:

3.1 源码说明
int main(int argc, char **argv)
{
int ret = 0;
if(1 == argc){
printf("\nerr: Missing parameter!\n");
printf("================= [usage] ==================\n");
printf("example:\n");
printf("\t%s <22/30>\n", argv[0]);
printf("--------------------------------------------\n");
return 0;
}
char *pbuf = NULL;
int skip = 0;
FILE *fp = NULL;
int cameraIndex = atoi(argv[1]); //通常是video22
ret = mipicamera_init(cameraIndex, CAMERA_WIDTH, CAMERA_HEIGHT, 0);
if (ret) {
printf("error: %s, %d\n", __func__, __LINE__);
goto exit3;
}
pbuf = (char *)malloc(IMAGE_SIZE);
if (!pbuf) {
printf("error: %s, %d\n", __func__, __LINE__);
ret = -1;
goto exit2;
}
//跳过前10帧
skip = 10;
while(skip--) {
ret = mipicamera_getframe(cameraIndex, pbuf);
if (ret) {
printf("error: %s, %d\n", __func__, __LINE__);
goto exit1;
}
}
/* tips: 可以在Ubuntu下用mplayer播放录制图像
* mplayer -demuxer rawvideo -rawvideo w=1920:h=1080:format=bgr24 photo -loop 0
*/
fp = fopen("/tmp/photo", "w");
if (!fp) {
printf("error: %s, %d\n", __func__, __LINE__);
ret = -1;
goto exit2;
}
fwrite(pbuf, 1, IMAGE_SIZE, fp);
fclose(fp);
exit1:
free(pbuf);
pbuf = NULL;
exit2:
mipicamera_exit(cameraIndex);
exit3:
return ret;
}其中mipicamera_init(),mipicamera_getframe(),mipicamera_exit()是对v4l2接口调用的易用化封装。具体实现于02_camera/commonApi/mipi_camera.c。
- 相关推荐
- 热点推荐
- 瑞芯微
- 摄像头模组
- EASY-EAI灵眸科技
- RV1126B
-
瑞芯微RV1126B多路AHD摄像头实测演示,触觉智能配套AHD硬件方案2026-06-16 133
-
【EASY-EAI-PI2(RV1126B)开发板试用体验】开箱测试2026-06-13 211
-
【EASY-EAI-PI2(RV1126B)开发板试用体验】整理开发板的资料2026-06-11 56
-
新品发布!新一代RV1126B开发套件EASY-EAI-PI2正式上线2026-06-08 831
-
瑞芯微(EASY EAI)RV1126B ubuntu系统SDK源码获取2026-05-23 229
-
瑞芯微RV1126B 方案特性2026-05-11 2500
-
瑞芯微(EASY EAI)RV1126B AOV方案2026-04-16 7384
-
瑞芯微(EASY EAI)RV1126B 网络摄像头方案2026-04-15 1375
-
瑞芯微(EASY EAI)RV1126B 人员检测方案2026-04-14 1245
-
【EASY EAI Nano-TB(RV1126B)开发板试用】介绍、系统安装2025-12-23 1120
-
【EASY EAI Nano-TB(RV1126B)开发板试用】桌面系统功能测试-驱动摄像头-Mediapipe人体姿态检测12025-12-19 484
-
瑞芯微(EASY EAI)RV1126B AHD摄像头2025-12-17 4668
-
【EASY EAI Nano-TB(RV1126B)开发板试用】+1、开箱上电2025-11-19 1364
-
【EASY EAI Nano-TB(RV1126B)开发板试用】开箱测评2025-11-01 1886
全部0条评论

快来发表一下你的评论吧 !
