

采用BP神经网络的无模型自适应迭代学习控制器的设计
描述
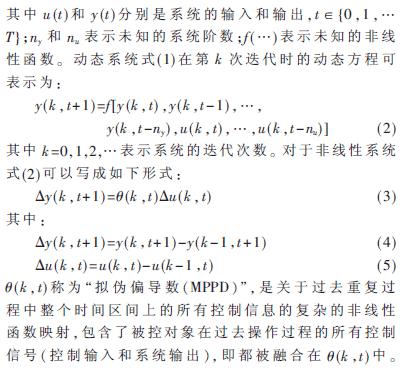
迭代学习控制(iterative learning control,简称ILC)由Arimoto等人于1984年正式提出,它是指不断重复一个同样轨迹的控制尝试,并以此修正控制律,以得到非常好的控制效果的控制方法。 迭代学习控制是学习控制的一个重要分支,是一种新型学习控制策略。它通过反复应用先前试验得到的信息来获得能够产生期望输出轨迹的控制输入,以改善控制质量。与传统的控制方法不同的是,迭代学习控制能以非常简单的方式处理不确定度相当高的动态系统,且仅需较少的先验知识和计算量,同时适应性强,易于实现;更主要的是,它不依赖于动态系统的精确数学模型,是一种以迭代产生优化输入信号,使系统输出尽可能逼近理想值的算法。它的研究对那些有着非线性、复杂性、难以建模以及高精度轨迹控制问题有着非常重要的意义。
前馈式学习控制结构
针对设计部分依赖、不完全依赖和不依赖受控系统数学模型的控制系统,国内外控制理论界做了多年的努力,发展了许多理论和方法。例如专家系统、模糊控制[1]、神经网络、多模型方法等。最近无模型自适应控制理论得到了广泛的应用,该控制器的设计和分析不需要已知系统的任何知识,仅依赖于系统的输入输出数据,与模型结构、系统阶数均无关。
迭代学习控制(ILC)可利用以前操作的信息修正当前控制行为,提高控制性能,可以实现有限时间区间上的完全跟踪任务,近十几年来得到了广泛的研究[。池荣虎将非参数自适应控制(NP-AC)的基本思想和分析手段引入到学习过程中,提出了一种新的无模型自适应迭代学习控制方案(MF-AILC)。考虑如下一般非线性离散时间SISO系统:

这种控制方案只需系统的输入输出数据,与系统的模型结构、系统阶数无关。
神经网络是借鉴于生物神经网络而发展起来的新型智能信息处理系统,可作为一般的函数估计器,有较强的自学习、自组织与自适应性,能够用数理方法从信息处理的角度对人脑神经网络进行抽象,并建立某种简化模型。模糊神经网络将神经网络与模糊逻辑[5]相结合,这种结合给智能系统提供了一个新的研究方向[6]。
根据系统的运行状态,调整控制器的参数-拟伪偏导数θ(k,t),以达到某种性能指标的最优化,使输出层的输出对应于拟伪偏导数θ(k,t),通过神经网络的自身学习、加权系数调整,使其稳定状态对应于某种最优控制律下的无模型自适应控制器的参数。利用模糊控制的鲁棒性和非线性控制作用,对神经网络NN的输入进行预处理,避免了当神经网络用Sigmoid函数或双曲正切函数时,由于输入过大易导致输出趋于饱和使得对输入不再敏感。
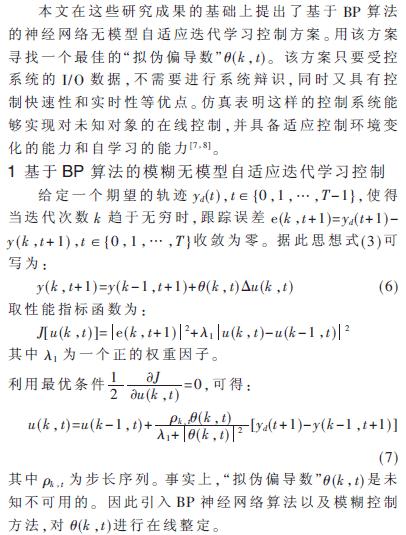
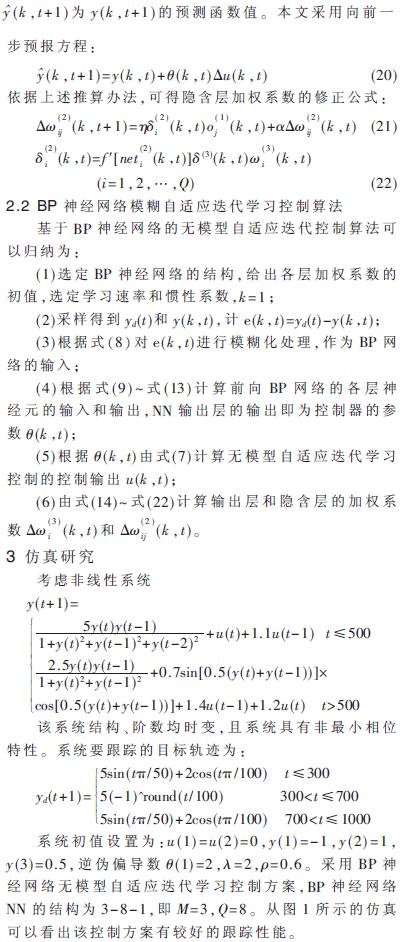
2 算法实现
BP算法是学习过程由信号的正向传播与误差的反向传播两个过程组成。正向传播时,输入样本从输入层传人,经各隐层逐层处理后,传向输出层。若输出层的实际输出与期望的输出(教师信号)不符,则转入误差的反向传播阶段。误差反传是将输出误差以某种形式通过隐层向输入层逐层反传,并将误差分摊给各层的所有单元,从而获得各层单元的误差信号,此误差信号即作为修正各单元权值的依据。这种信号正向传播与误差反向传播的各层权值调整过程,是周而复始地进行的。权值不断调整的过程,也就是网络的学习训练过程。此过程一直进行到网络输出的误差减少到可接受的程度,或进行到预先设定的学习次数为止。
2.1 BP神经网络
三层BP神经网络,有M个输入节点、Q个隐层节点、一个输出节点,输出节点对应无模型自适应迭代学习控制器的逆为偏导数θ(k,t),输出层和隐层的神经元的激励函数可取正负对称的Sigmoid函数。
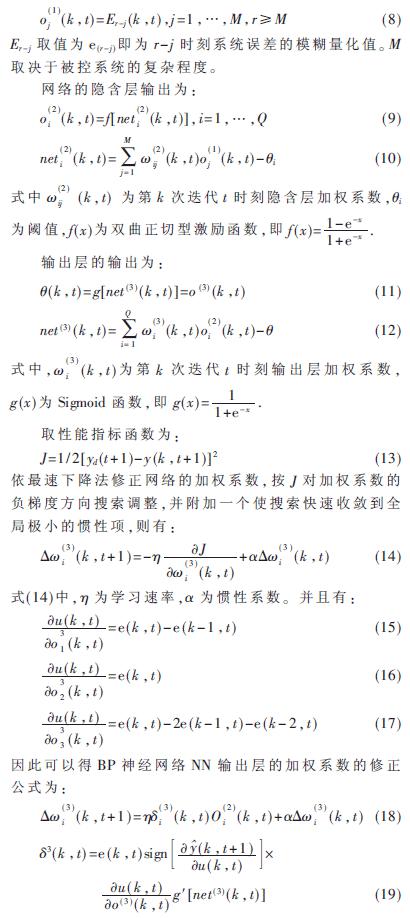
BP网络的前向计算和加权系数修正迭代算法如下:
输入节点对应经模糊量化处理后的系统状态变量:
将BP神经网络、模糊理论及无模型自适应迭代学习相结合,构造出了一种基于BP神经网络的模糊无模型自适应迭代学习控制器。该控制器综合了三者的优点,利用有着较强的非线性逼近性的BP神经网络学习逆伪偏导数。迭代学习控制适用于具有重复运动性质的被控系统,它的目标是实现有线区间上的完全跟踪任务。它通过对被控系统进行控制尝试,以输出信号与给定目标的偏差修正不理想的控制信号,使得系统的跟踪性能得以提高。迭代学习控制的研究对具有较强的非线性耦合、较高的位置重复精度、难以建模和高精度轨迹跟踪控制要求的动力学系统有着非常重要的意义。
-
如何优化BP神经网络的学习率2025-02-12 2172
-
人工神经网络和bp神经网络的区别2023-08-22 6650
-
基于BP神经网络的PID控制器之锅炉蒸汽压力系统2023-07-19 884
-
基于BP神经网络的PID控制2021-09-07 2776
-
基于BP神经网络控制+Simulink双闭环直流调速系统仿真设计2021-06-28 1856
-
神经网络自适应控制及其发展应用2021-05-31 1459
-
BP神经网络PID控制电机模型仿真2020-02-22 3722
-
【案例分享】基于BP算法的前馈神经网络2019-07-21 3430
-
如何使用S函数实现BP神经网络PID控制器及Simulink仿真的资料说明2019-03-13 3119
-
基于扩展反向传播神经网络的自适应控制方法2017-12-01 1116
-
一种改进的自适应遗传算法优化BP神经网络2017-11-16 1806
-
BP神经网络模型与学习算法2017-09-08 1211
-
基于BP神经网络的PID控制器参数优化方法2012-03-20 1987
-
加工过程的神经网络模型参考自适应控制2009-12-26 599
全部0条评论

快来发表一下你的评论吧 !
