

将超声波和AT89C2051单片机相结合实现倒车防撞报警系统的设计
描述
本方案所设计的倒车防撞报警系统采用软、硬件结合的方法,具有模块化和多用化的特点。设计中介绍了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统设计的总体构成,本方案的提出将对汽车主动防撞乃至自动驾驶产生,给驾驶者提供一个倒车的操作指令。
1.引言
众所周知,要检测两头之间是否有障碍物,一般的做法是一头发射一个信号,在接收处判断是否有信号接收到,若有信号接收到,说明中间没有障碍物;若接收不到,则说明有障碍物。然而在汽车倒车防撞报警系统的设计中,由于汽车是一个移动的物体,不可能在某一具体的位置上安装接收或发射装置,这就决定了系统的发射与接收装置必须安装于一起,因此如何设计一款将发射与接收装置安装在一起的物体检测装置是我们的研究方向。
2.超声波测距系统介绍
超声测距从原理上可分为共振式、脉冲反射式两种。由于应用要求限定,在这里使用脉冲反射式,即利用超声波的反射特性。
超声波测距原理是通过超声波发射传感器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就停止计时。常温下超声波在空气中的传播速度为C=340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(S),即:
S=C*t/2 (1-1)
可以看出其主要部分有:(1)供应电能的脉冲发生器(发射电路);(2)使接收和发射隔离的开关部分;(3)转换电能为声能,且将声能透射到介质中的发射传感器;(4)接收反射声能(回波)和转换声能为电信号的接收传感器;(5)接收放大器,可以使微弱的回声放大到一定幅度,并使回声激发记录设备;(6)记录/控制设备,通常控制发射到传感器中的电能,并控制记录回波的时间、存储所要求的数据,并将时间间隔转换成距离。
3.系统总体设计
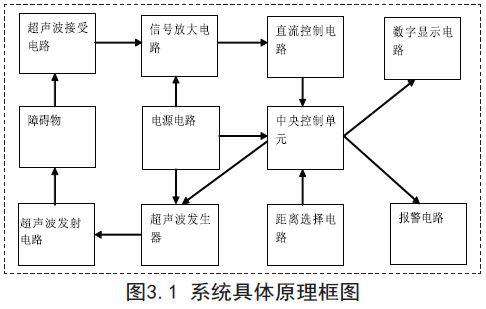
该系统主要用电磁式输出与输入振荡电路,所输入的信号经过放大,直接发送到单片机AT89C2051进行处理,通过编程可以进行自动控制。系统具体原理框图如图3.1所示:
该系统主要由以下三个功能块构成:超声波传感器T/R40-16、超声波发射与接收构成的收发系统;中央控制处理器AT89C2051组成的主机系统;控制报警输出系统。
主要的系统电路有:电源电路、超声波发射电路、超声波接收电路、信号放大电路、直流控制电路、显示电路、探测距离选择电路、报警电路、单片机控制电路等。
4.主要器件的选取
4.1 超声波传感器的选取
本系统选用超声波传感器T/R40-16,它是一种性能优良的发射与接收配对的传感器。
超声波传感器的基本特性有频率特性和指向特性。
(1)频率特性
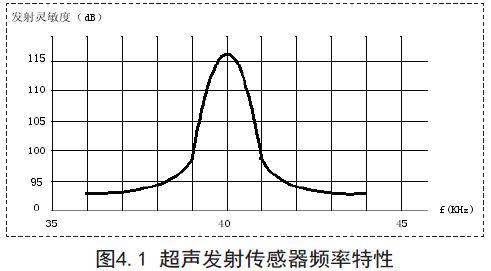
图4.1是超声波发射传感器的频率特性曲线。其中,f=40kHz为超声发射传感器的中心频率,在此处,超声发射传感器所产生的超声机械波最强,也就是说在所产生的超声声压能级最高。而在两侧,声压能级迅速衰减。因此,超声波发射传感器一定要使用非常接近中心频率的交流电压来激励。
(2)指向特性
实际的超声波传感器中的压电晶片是一个小圆片,可以把表面上每个点看成一个振荡源,辐射出一个半球面波(子波),这些子波没有指向性。但离开超声传感器的空间某一点的声压是这些子波迭加的结果(衍射),却有指向性。
4.2 中央控制器的选取
本系统选用AT89C2051单片机作为中央控制器。
AT89C2051是由美国Atmel公司生产的至今为止世界上最新型的高性能八位单片机。
该芯片采用FLASH存储技术,内部具有2kB字节快闪存存储器,采用DIP封装,是目前在中小系统中应用最为普及的单片机。
5.软件语言的选取
本系统以单片机为核心。采用汇编语言编程。汇编语言是指用指令的助记符、符号地址、标号等符号书写程序的一种软件语言,它是计算机软件设计的重要工具。在系统软件开发、实时控制的和实时处理领域中有着不可替代的地位。用汇编语言编程可以充分发挥计算机硬件的功能,进行高质量的设计,开发出的软件具有内存开销小、运算速度快的特点,而且它不独立于具体机器,是一种非常通用的低级程序设计语言,采用汇编语言编程,用户可以直接操作到单片机内部的工作寄存器和片内RAM单元,处理数据的过程非常具体。
6.系统的硬件设计
该系统的硬件设计采用模块化设计方法。按实现的功能来分,可分为以下几个部分。
6.1 时钟电路的设计
所有MCS-51微控制器均有片内振荡器作为CPU的时钟源。但通常所说的这种片内振荡器,实际其本身并非振荡器,只不过是一个适于构成反馈振荡器的高增益反相放大器罢了。为构成反馈振荡器,必须在其XTAL1和X T A L 2两个引脚上提供一个参考频率。
XTAL1是该反相放大器的输入端;XTAL2则是其输出,并同时作为内部时钟发生器的输入。参考频率可由晶体、电感或外部时钟源提供。通常的做法是:

在XTAL1与XTAL2两端跨接一只石英晶体或陶瓷谐振器以及一端接地的两只电容器。
这里的石英晶体为一电感性元件,与外接其上的电容构成并联谐振回路,为片内振荡器提供正反馈和振荡所必需的相移条件,从面构成一个自激振荡器。
6.2 复位电路的设计
AT89C2051的RST脚为外部复位信号的输入引脚,在MCS-51器件内部,RST接到一个施密特触发器的输入端。大家知道,施密特触发器要有一定的输入电平才能触发,所以可滤掉某些噪声干扰信号。
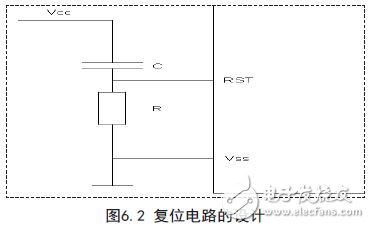
图6.2复位电路的设计,把RST引脚通过10uF电容接到Vcc并同时经10KΩ电阻接地,就可获得上电自动复位的结果。应当指出,对于CHMOS器件来说,10KΩ电阻是不需要的,但上电后保持复位脚高电平的时间超过11ms都可以完成复位,因此电阻适当取大点也无妨。
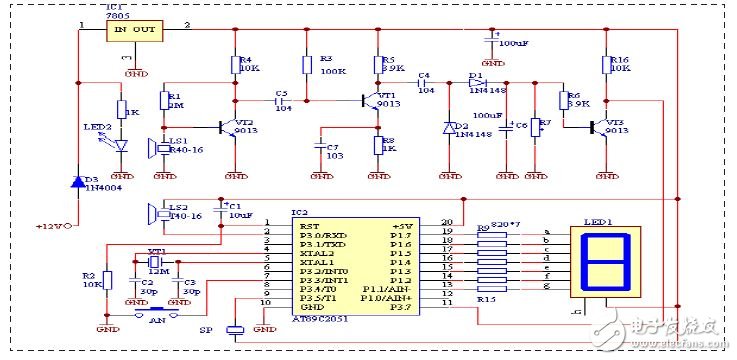
6.3 整体电路设计
7.pcb设计
8.超声波发射程序流程
void send()
{
csb_in=1;
for(i=0;i<1;i++)
{
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
}
csb_in=0;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
}
9.结论
本方案所设计的倒车防撞报警系统是对汽车防撞报警系统由被动防撞向主动防撞做的一项新的探索,它针对部分司机对方位的不敏感和倒车操作的不熟练进行设计, 对于系统设计的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统设计的总体构成,本方案的提出将对汽车主动防撞乃至自动驾驶产生,给驾驶者提供一个倒车的操作指令。
-
基于51单片机的车辆倒车雷达报警系统,HC-SR04超声波测距,全套资料2024-03-19 1895
-
基于AT89C2051倒车防撞超声波报警系统设计2023-10-10 453
-
基于MSP430单片机超声波测距仪倒车防撞报警器系统的设计资料2021-11-29 1372
-
使用AT89C2051单片机设计超声波泊车防撞系统的详细资料说明2019-09-25 1283
-
基于AT89C2051的超声波测距系统[图]2018-01-18 917
-
基于AT89C2051单片机的GPS时钟系统2017-02-07 1017
-
基于AT89S51单片机的超声波传感器汽车防撞报警系统设计2016-05-06 892
-
基于AT89C2051的超声波测距系统2016-03-23 812
-
基于AT89C2051单片机的防盗自动报警电子密码锁系统的设计2016-02-17 991
-
基于AT89C2051的倒车防撞超声波报警系统2013-12-18 4533
-
一种超声波倒车防撞系统设计2011-06-22 1216
-
基于AT89C52超声波测距倒车防撞报警系统2010-03-30 2691
-
用AT89C2051设计超声波测距仪2009-11-06 722
-
基于AT89C2051的智能型汽车防撞报警器的设计2009-05-05 1016
全部0条评论

快来发表一下你的评论吧 !
