

 激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
描述
[首发于智驾最前沿微信公众号]激光雷达是自动驾驶汽车重要的感知硬件之一,已成为许多车企的主流选择。激光雷达不断向周围环境发射激光束,并接收从物体表面反射回来的光信号,依据光的飞行时间计算出目标的距离、位置,从而生成三维点云。基于这一原理,激光雷达能够为自动驾驶系统提供对前方障碍物清晰、精准的感知能力。
但在实际应用中,当激光束照射到如车牌金属层、铝合金交通标志牌或反光胶贴等反射率极高的表面时,其反射过程便无法与常规物体那样“理想”。这些表面会将大量激光能量几乎无损地沿原路强烈反射回接收器。由于激光雷达接收器对强反射信号极为敏感,这种情形容易在点云数据中引发“鬼影”与“膨胀”的问题。这些因高反射表面引起的点云误差,无疑给后续的感知算法带来非常大的挑战。

鬼影和膨胀是个啥?
所谓鬼影,就是指点云中出现了实际环境并不存在的虚假物体轮廓。举个例子,一块位于车辆左侧的交通标志牌,其强反射信号可能在点云中于车辆前方或右侧错误地生成一个类似的点云簇,导致系统误判为真实障碍,引发不必要的减速或避让,这会严重影响感知可靠性。
含有“鬼影”的点云
膨胀则是指真实物体的点云轮廓因信号过强而向外扩散,使其尺寸被显著放大。继续以一个例子来理解下,一块宽仅几十厘米的反光标牌,可能在点云中呈现为一两米宽的模糊团块。这不仅影响对物体实际尺寸的准确判断,还会干扰后续的障碍物分类、跟踪等关键感知任务。
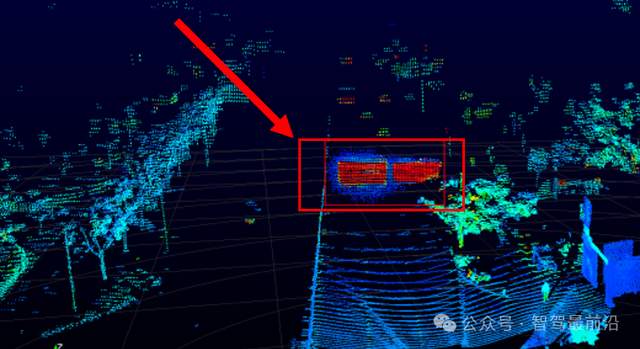
路牌点云“膨胀”
这两种误差都会直接增加感知算法精准识别与环境理解的难度。

为什么高反射物体会让激光雷达出问题
从刚刚的两个概念中我们会发现,点云出现鬼影和膨胀的问题,都是高反射物体造成的。要理解这些问题出现的原因,需要回到激光雷达的信号发射和接收机制本身。激光雷达发射的光是非常短的脉冲,它们在空间中扩散,然后击中物体表面。一部分光被吸收,一部分光被散射,还有一部分被反射回传感器。感知系统会根据返回光的时间来计算距离位置。
正常情况下,大多数物体都是漫反射表面。所谓漫反射,就是光打上去以后向各个方向平均散开,返回到接收器的只有一小部分,它们的强度相对适中,信号和噪声比(SNR)稳定。
但高反射物体并不是漫反射表面,它们属于高反射表面甚至是角反射体。所谓角反射体,就是指光线打上去之后大部分能沿入射方向原路返回(类似交通标牌上的那种材料效果)。这种物体会在短时间内把很多光“推回”激光雷达接收器。由于物体表面和入射角的不同,高反射物体产生的激光回波强度会远高于漫反射物体。
这种强反射带来的直接结果,就是接收器会捕获到强度异常高的回波信号。激光雷达的探测器依据信号强度进行判断,当遇到如此强烈的回波时,便会将其直接认定为有效的空间反射点,从而把这些异常信号当作真实物体的位置信息予以记录和处理。
有些强反射有时还不是直接返回,其可能发生多次反射或者在不同路径上传播后再反射回来。如光线在传感器内部某些表面反射之后,再次被高反射目标反射回来,这种经过额外路径的信号也可能被接收器捕捉到。由于这类多次反射回来的信号实际经过的时间比直接反射要长,系统就会错误地认为这个点离得更远,从而在点云上形成“在真实物体后方”的虚假点,也就是鬼影。
还有一种情况是当高反射信号太强的时候,会对雷达内部多个通道之间产生串扰。激光雷达通常由许多发射和接收通道组成,它们在同一时间内同时工作。当某个通道接收到过强的反射时,这个强信号可能会泄漏到其他通道的接收模块里,使得那些通道错误地产生点。这种不同通道之间的干扰,也是鬼影产生的一个重要原因。

鬼影和膨胀为什么看起来那么“像真的”
理解了信号为何出错,我们就可以解释为什么鬼影和膨胀看起来特别容易迷惑自动驾驶系统。
激光雷达输出的是点云数据,每一个激光脉冲返回后都会在三维空间里生成一个点,表示那里有反射体。如果这些点来自真实障碍物,那么整个点云就描述了障碍物的形状和位置。但如果这些点是错误的返回结果,它们在空间里的分布仍然可能形成一个看起来有结构、有形状的团簇,这样的虚假的“形状”在视觉上也会被感知算法错误识别为真实物体。
高反射物体除了在真实位置反射,也会在附近产生多个不同距离、不同角度的次级反射回波。这些次级回波还不是真正的噪点,而是有一定规律的分布,这就让错误点看起来有连续性。算法在聚类分析或分类判断的时候会把它们当成真实目标的延伸,从而误判目标尺寸、方位甚至移动轨迹。
膨胀现象有点像“点云模糊”。因为高反射信号的强度和接收器的动态响应可能导致飞行时间的微小误差,或者影响激光束在周边空间的探测结果。这就使得原本应该集中在物体表面的点云被“拉散”了一点,看上去比实际更宽、更大。虽然这些点并不是虚假物体,但它们在空间分布上的扩散让感知系统误以为物体比实际更大。

最后的话
高反射物体带来的激光雷达鬼影和膨胀现象,是激光雷达技术必须面对的难题。其背后的根本原因,就是高反射表面产生了异常强的回波信号和多路径反射,导致接收器接收到的信号不再是简单的一次主反射,而是夹杂了大量次级返回和串扰。这些错误信号被误当成真实点,就形成了看似真实却不存在的点云结构(鬼影),或者把真实物体的点云范围拉得更大(膨胀)。只有解决这些问题,才能让自动驾驶的感知更加精准。
-
为什么自动驾驶激光雷达点云中间是黑洞?2026-02-24 501
-
激光雷达点云中的空洞现象是什么原因导致的?2026-02-14 16220
-
如何解决激光雷达点云中“鬼影”和“膨胀”问题?2026-01-02 740
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30462
-
TOF激光雷达2019-06-07 9270
-
激光雷达除了可以激光测距外,还可以怎么应用?2018-05-11 6107
-
激光雷达的核心重要指标到底是什么?2018-02-07 14367
-
固态设计激光雷达2018-01-25 8522
-
激光雷达2018-01-11 7224
-
固态激光雷达2018-01-04 5341
-
消费级激光雷达的起航2017-12-07 7483
-
激光雷达面临的机遇与挑战2017-09-26 6724
-
常见激光雷达种类2017-09-25 13998
-
激光雷达分类以及应用2017-09-19 8898
全部0条评论

快来发表一下你的评论吧 !
