

NXP TJA1051高速CAN收发器:技术解析与应用指南
电子说
描述
NXP TJA1051高速CAN收发器:技术解析与应用指南
在汽车电子领域,高速CAN(Controller Area Network)通信是实现各个电子控制单元(ECU)之间高效数据传输的关键技术。NXP Semiconductors推出的TJA1051高速CAN收发器,凭借其出色的性能和丰富的特性,成为了众多汽车应用的理想选择。今天,我们就来深入解析TJA1051的技术细节和应用要点。
文件下载:NXP Semiconductors TJA1051高速CAN收发器.pdf
一、概述
TJA1051是一款专为汽车行业高速CAN应用设计的收发器,它在CAN协议控制器和物理双线CAN总线之间提供了可靠的接口。作为NXP第三代高速CAN收发器,相较于前代产品如TJA1050,TJA1051在电磁兼容性(EMC)和静电放电(ESD)性能方面有了显著提升。
特性亮点
- 标准兼容:完全符合ISO 11898 - 2:2016和SAE J2284 - 1至SAE J2284 - 5标准,确保了在CAN FD快速阶段数据速率高达5 Mbit/s时的可靠通信。
- 电源适应性:适用于12 V和24 V系统,为不同的汽车电气环境提供了灵活的解决方案。
- 低电磁干扰:具备低电磁辐射(EME)和高电磁抗扰度(EMI)特性,有效减少了对周围电子设备的干扰。
- 多电压接口:TJA1051T/3和TJA1051TK/3型号的VIO输入允许直接与3 V至5 V的微控制器接口,方便了系统设计。
- 节能模式:TJA1051T/E型号的EN输入可使微控制器将收发器切换到极低电流的关闭模式,实现了低功耗管理。
- 环保设计:该产品为暗绿色产品,无卤素且符合有害物质限制(RoHS)标准,同时通过了AEC - Q100认证,满足汽车级应用的要求。
二、快速参考数据
| Symbol | Parameter | Conditions | Min | Typ | Max | Unit |
|---|---|---|---|---|---|---|
| Vcc | 电源电压 | 4.5 | 5.5 | V | ||
| V1o | Vio引脚电源电压 | 2.8 | - | 5.5 | V | |
| Vuvdvcc) | Vcc引脚欠压检测电压 | 3.5 | - | 4.5 | V | |
| Vuvd(vIo) | Vio引脚欠压检测电压 | 1.3 | 2.0 | 2.7 | V | |
| Icc | 电源电流 | 静音模式 | 0.1 | 1 | 2.5 | mA |
| 正常模式:总线隐性 | 2.5 | 5 | 10 | mA | ||
| 正常模式:总线显性 | 20 | 50 | 70 | mA | ||
| lo | Vio引脚电源电流 | 正常/静音模式 | ||||
| 隐性:VTxD = Vio | 80 | 250 | HA | |||
| 显性;VTxD = 0V | 350 | 500 | uA | |||
| VESD | 静电放电电压 | IEC 61000 - 4 - 2在CANH和CANL引脚 | -8 | +8 | kV | |
| VCANH | CANH引脚电压 | -58 | +58 | V | ||
| VCANL | CANL引脚电压 | -58 | +58 | V | ||
| Tvj | 虚拟结温 | -40 | +150 | ℃ |
这些数据为工程师在设计电路时提供了重要的参考依据,确保了TJA1051在不同工作条件下的稳定运行。
三、引脚信息
引脚配置
TJA1051有多种封装形式,不同型号的引脚配置略有差异。常见的有SO8和HVSON8封装,具体的引脚配置图如下:
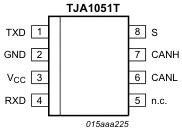
引脚描述
| Symbol | Pin | Description |
|---|---|---|
| TXD | 1 | 发送数据输入 |
| GNDU | 2 | 接地 |
| Vcc | 3 | 电源电压 |
| RXD | 4 | 接收数据输出;从总线读取数据 |
| n.C. | 5 | 未连接;TJA1051T版本 |
| EN | 5 | 使能控制输入;TJA1051T/E专用 |
| Vio | 5 | V0电平适配器电源电压;TJA1051T/3和TJA1051TK/3专用 |
| CANL | 6 | 低电平CAN总线 |
| CANH | 7 | 高电平CAN总线 |
| S | 8 | 静音模式控制输入 |
了解引脚的功能和用途,对于正确连接和使用TJA1051至关重要。
四、功能描述
工作模式
| TJA1051支持两种主要工作模式:正常模式和静音模式,TJA1051T/E型号还额外支持关闭模式。这些模式通过引脚S和EN进行选择,具体的工作模式描述如下表所示: | Mode | Inputs | Outputs | ||
|---|---|---|---|---|---|
| Pin EN[1] | Pin S | Pin TXD | CAN driver | Pin RXD | |
| Normal | HIGH | LOW | LOW | 显性激活[2] | |
| HIGH | LOW | HIGH | 隐性激活[2] | ||
| Silent | HIGH | HIGH | X[3] | 隐性激活[2] | |
| Off[1] | LOW | X[3] | X[3] | 浮动 | 浮动 |
正常模式
当引脚S为低电平时,TJA1051进入正常模式。在该模式下,收发器能够通过CANH和CANL总线进行数据的发送和接收。差分接收器将总线上的模拟数据转换为数字数据,并输出到RXD引脚。同时,内部对总线输出信号的斜率进行控制,以确保最低的电磁辐射(EME)。
静音模式
当引脚S为高电平时,TJA1051进入静音模式。在静音模式下,发送器被禁用,总线引脚释放到隐性状态,而其他功能(包括接收器)继续正常工作。这种模式可以防止故障的CAN控制器干扰整个网络通信。
关闭模式
TJA1051T/E型号的EN引脚为低电平时,收发器进入关闭模式。在关闭模式下,整个收发器被禁用,总线引脚处于浮动状态,微控制器可以在不需要CAN通信时节省功耗。
故障保护功能
- TXD显性超时功能:当TXD引脚为低电平时,启动“TXD显性超时”定时器。如果TXD引脚的低电平状态持续时间超过to(dom)TXD,发送器将被禁用,总线释放到隐性状态,防止硬件或软件故障导致总线永久处于显性状态。
- 内部偏置:TXD引脚内部上拉到VIO,S和EN引脚(TJA1051T/E)内部下拉到GND,确保在引脚浮空时的安全和稳定状态。
- 欠压检测:当VCC或VIO电压低于各自的欠压检测电平(Vuvd(VCC)和Vuvd(VIO))时,收发器将关闭并与总线断开连接,直到电压恢复正常。
- 过温保护:输出驱动器具备过温保护功能。当虚拟结温超过关断结温Tj(sd)时,输出驱动器将被禁用,直到温度下降且TXD变为隐性状态,避免因温度漂移导致输出驱动器振荡。
VIO电源引脚
TJA1051有三种版本,仅在引脚5的功能上有所不同。TJA1051T/3和TJA1051TK/3的VIO引脚应连接到微控制器的电源电压,以调整TXD、RXD和S引脚的信号电平与微控制器的I/O电平兼容。对于没有VIO引脚的型号,VIO输入内部连接到VCC,使信号电平与5 V微控制器兼容。
五、电气特性
静态特性
静态特性描述了TJA1051在不同工作条件下的电压、电流等参数。例如,在不同模式下的电源电流、输入输出电压阈值等。这些参数对于评估系统的功耗和信号完整性非常重要。
动态特性
动态特性主要涉及收发器的时序参数,如从TXD到总线显性和隐性的延迟时间、从总线到RXD的延迟时间等。这些参数确保了在高速数据传输时的时序准确性。
六、应用信息
应用电路图
文档中提供了TJA1051T/E和TJA1051T/3或TJA1051TK/3的典型应用电路图,为工程师在实际设计中提供了参考。

应用提示
更多关于TJA1051应用的详细信息,可以参考NXP的应用提示AH1014,其中包含了独立高速CAN收发器TJA1042/TJA1043/TJA1048/TJA1051的相关内容。
七、测试信息
文档中给出了CAN收发器的时序测试电路和测量收发器驱动对称性的测试电路,同时强调了该产品已通过AEC - Q100标准认证,适用于汽车应用。
八、封装信息
TJA1051有SO8和HVSON8两种封装形式,文档详细介绍了每种封装的尺寸和相关参数,为PCB设计提供了精确的参考。
九、焊接信息
焊接方法概述
焊接是将封装连接到印刷电路板(PCB)以形成电路的常用方法。常见的焊接方法有波峰焊和回流焊,它们各有优缺点。
- 波峰焊:适用于通孔元件和表面贴装器件(SMD)的混合电路板,但对于细间距SMD不太适用。
- 回流焊:更适合小型化、高密度的电路板,适用于各种封装形式。
焊接注意事项
在焊接过程中,需要考虑电路板规格、封装尺寸、湿度敏感性等因素。同时,不同的焊接工艺(如无铅焊接和SnPb焊接)对温度曲线有不同的要求,必须严格控制焊接温度,以确保焊接质量和器件的可靠性。
十、总结
NXP TJA1051高速CAN收发器以其出色的性能、丰富的功能和良好的兼容性,为汽车高速CAN通信提供了可靠的解决方案。作为电子工程师,在设计汽车电子系统时,充分了解TJA1051的技术细节和应用要点,能够帮助我们更好地实现系统的功能和性能要求。
你在使用TJA1051过程中遇到过哪些问题?或者对它的某些特性有更深入的见解?欢迎在评论区分享交流。
-
TJA1145高速CAN收发器:汽车网络应用的理想之选2026-04-26 780
-
深入剖析TJA1043高速CAN收发器:特性、应用与设计要点2026-02-10 963
-
探秘TJA1042高速CAN收发器:设计与应用指南2026-01-28 1453
-
深入解析TJA1051高速CAN收发器:特性、应用与设计要点2026-01-18 2057
-
探索TJA1044:高性能高速CAN收发器的卓越之选2025-12-24 1166
-
请问TJA1051T可以支持低速CAN通信吗?2023-03-27 663
-
SIT1051QTK/3芯片可pin to pin完美替代TJA1051TK/32023-01-07 3469
-
TJA1051高速CAN收发器产品数据手册2010-03-11 2115
-
TJA1051 High-speed CAN transce2009-11-10 2043
-
NXP扩展高速CAN收发器产品系列--全新的TJA1042型2009-05-20 4147
全部0条评论

快来发表一下你的评论吧 !
