

采用XIAO MG24开发板的手套动作控制电动滑板设计
描述
本篇应用文章来自于Silicon Labs(芯科科技)在线技术社区,作者分享了运用XIAO MG24开发板来打造通过手套动作控制电动滑板(Electric Skateboard)的简要开发步骤和关键电路原理。XIAO MG24是开源硬件创新平台公司-Seeed Studio所推出的超小型低功耗无线微控制器开发板,其内核基于芯科科技EFR32MG24(MG24)多协议无线芯片,是面向低功耗蓝牙(Bluetooth LE)、Zigbee和Thread等无线协应用的理想选择。它结合了强大的性能、丰富的无线协议支持和极小的尺寸,非常适合可穿戴设备、智能家居、传感器网络等场景。
采用XIAO MG24开发板来实现带有独特控制方式的电动滑板——通过手部动作控制滑板,而不是使用传统遥控器。用户只需佩戴一只手套,通过手指的弯曲动作即可实现加速或减速。
该项目充分利用了XIAO MG24开发板的微型尺寸,将其直接集成到手套中。系统将可穿戴输入转化为直观的无线运动控制,这是迈向更自然、更具身体感知的人机交互的重要一步。这一示例包括在手套上的传感器以准确检测手指动作,以及相关的电机驱动系统,还制作了定制同步带系统,以高效提供足够的扭矩推动滑板前行。同时开发者还使用了双向ESC,使滑板轻松具备前进和后退功能。
这里是 GitHub 文档,有兴趣的开发者可以在其中找到所有的代码,以及更深入的技术解析,介绍如何使用3块XIAO MG24开发板实现设计:https://github.com/hiteyjit/hiteyjit-xiao-showdown
电路原理
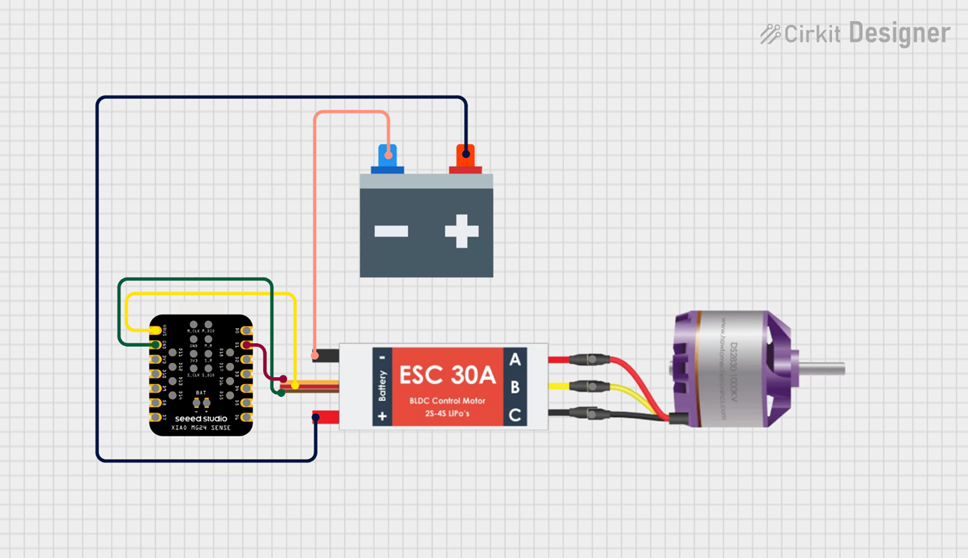
手套本身为每个弯曲传感器使用了基本的分压电路。XIAO MG24通过模拟读取这些信号,并通过I2C传输到第二块板子。一旦完成传输,第二块MG24板会通过蓝牙将信息发送到电机控制模块,后者将原始信号映射为PWM输出供ESC使用,以实现电机按所需速度和方向运行。
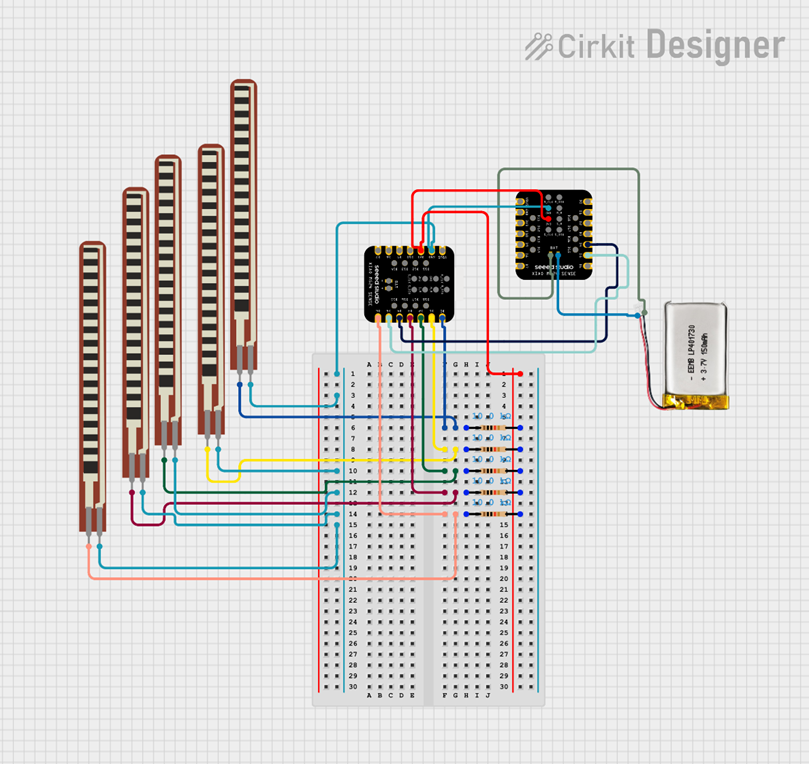
手套动作控制电动滑板各部组件连接的基本布局
手套传感器模块(XIAO MG24的电源通过USB-C电缆和移动电源连接到其中一块板子,这里示意为电池)
简要开发过程与未来改进
让XIAO MG24开发板之间的蓝牙通信稳定工作并非直观和轻松的,芯科科技的低功耗蓝牙协议栈与作者最初使用的ESP-NOW设置有着完全不同的工作流程,为了实现节点间一致的数据传输需要进行多次迭代。在硬件方面,早期测试中几乎烧毁ESC,因为从电钻电池组快速输出过多电流。系统仍能运行,但这次测试凸显了ESC对高电流冲击的敏感性。此外,开发过程中还注意到微控制器在长时间运行时出现轻微过热:MG24虽然紧凑高效,但在高电压电源下每隔几毫秒处理连续PWM信号,确实在热管理上接近极限。
未来改进方面,本示例的开发者计划集成MG24内置的6轴 IMU,实现基于动作的转向和稳定控制,让滑板能够根据手腕或手臂的倾斜进行方向控制。目前尚未开始探索这一功能,因为当前配置只有一台电机能驱动滑板并承载体重,而实现真正的转向控制需要两到三台电机以实现差速扭矩。这将是下一阶段的重点,一旦扩展了传动系统和电源管理系统,就会实现这一目标。
-
基于Vision Board开发板的电动滑板设计方案2026-01-13 7404
-
将经典射击游戏移植到芯科科技MG24 Matter开发板2025-11-30 1410
-
使用MG24开发板测试天线分集2025-07-04 2040
-
芯科科技MG24无线SoC在蓝牙测距中的应用2024-08-20 1905
-
EFR32MG24开发板介绍及IDE使用2024-08-10 2618
-
MG24无线SoC与Wirepas Mesh设备天作之合助力物联网开发2024-03-08 2349
-
【成功案例】MG24助力Waites开发适用于工业物联网和AI的传感器2023-10-30 1828
-
MG82G5E32开发包(应用.开发板.范例程序)2022-07-01 678
-
最新BG24/MG24无线集成芯片的多元客户应用案例2022-05-09 4447
-
Seeeduino XIAO开发板电路原理图免费下载2020-12-25 1419
-
电动滑板车电机控制器的作用是什么2020-06-12 7655
-
【Seeeduino XIAO申请】Seeeduino XIAO的PWM应用2020-06-08 2599
全部0条评论

快来发表一下你的评论吧 !
