

六维力传感器:机器人的“触觉”,选末端还是内置?
描述
在精密装配线上,机器人能以毫米级的精度将齿轮严丝合缝地压入;在手术室,机械臂能感知到针尖穿透组织时微牛级的力量变化。这一切“神奇”操作的背后,都离不开一个关键部件——六维力传感器。
一、什么是六维力传感器?
简单说,它是一个能同时测量三个方向力(Fx, Fy, Fz)和三个方向力矩(Mx, My, Mz)的高精度仪器。其核心在于内部的精密弹性体与应变计,通过解耦算法,将复杂的受力情况清晰量化。
海伯森洞察:真正的难点不仅在于测量,更在于如何在高速、高负载、温差变化等复杂工况下,保持长期稳定的精度与极低的轴间耦合干扰。这正是高端传感器技术的壁垒所在。
二、两大流派:末端直接测量 vs 一体式集成
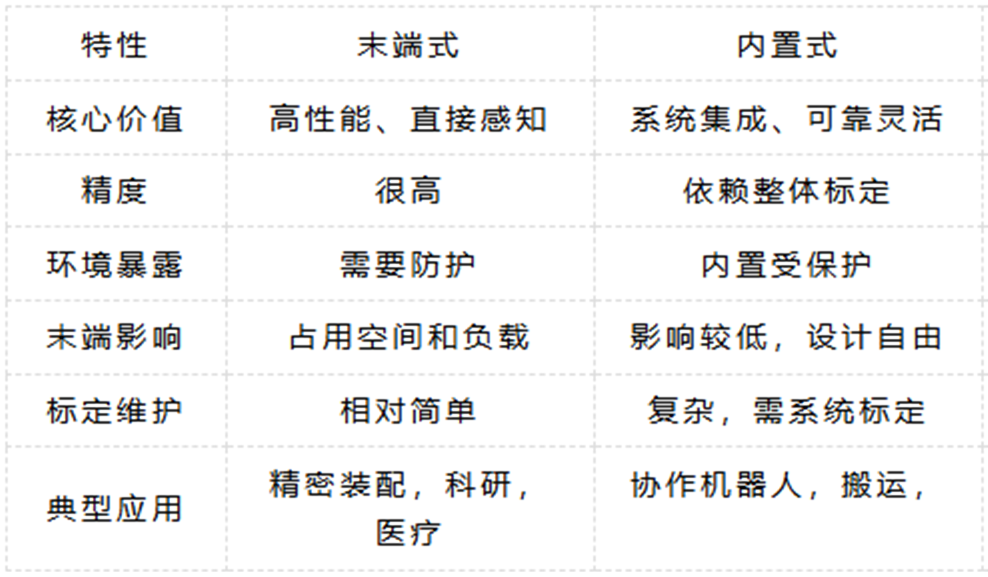
根据安装位置,六维力传感器主要分为两大技术流派。它们各有千秋,适用于不同的场景。
方案一:末端安装式——追求极致的“指尖触觉”
安装位置:机器人末端法兰与工具之间。
工作原理: 直接测量,获取最纯净的末端接触力。
海伯森代表性产品:HPS-FT系列 六维力传感器
该系列是海伯森面向高精度、高动态场景的旗舰产品,其设计充分体现了对“极致性能”的追求:
超高精度与灵敏度:采用高精度应变计及结构设计和先进的信号处理技术,实现低漂移和<2%FS的轴间串扰,确保测量数据真实可靠。
卓越的动态响应:高刚度设计带来高固有频率,能准确捕捉瞬态力变化,非常适合精密装配、医疗康复器械等对实时性要求极高的领域。
坚固与精密并存:在提供高达数百牛至数千牛力量程的同时,依然能分辨出微力的变化,兼具“开山斧”与“引线针”的双重特质。
缺点:如同所有末端传感器,它直接面对工作环境,需注意防碰撞与高污染。
方案二:内置式——注重可靠的“手腕神经”
安装位置:集成于机器人手臂内部(如关节处)。
工作原理: 间接推算,通过动力学模型由内侧受力反推末端外力。
海伯森技术应对:
内置式方案的核心挑战是模型精度和抗过载能力。
高可靠性设计:海伯森传感器固有的强抗过载、抗冲击性能,正是内置式传感器在机器人关节内部承受复杂内力的关键保障。海伯森080系列产品依据国家强制标准 (GB/T 3836.1-2021 和 GB/T 3836.4-2021),通过了煤科(北京)检测技术有限公司的检验,取得了防爆合格证。
精准标定支持:海伯森建立的高精度标定系统,能为机器人本体厂商提供可靠的传感器标定数据,为后续的全身动力学参数辨识奠定坚实基础。
典型应用:这是目前大多数协作机器人厂商选择的方案。机器人制造商通过集成此类传感器,实现对拖动示教、碰撞检测、柔顺控制等核心功能的支持。
如何选择?
三、未来展望:融合与智能
未来的趋势并非二选一,而是融合与智能化。无论传感器位于何处,其最终目标都是为机器人控制器提供最准确的环境交互信息。
海伯森正在推动的技术方向包括:
更智能的传感器:内置集成温度补偿及微处理器、状态自诊断,输出更稳定、更可靠的信息。
更完善的解决方案:不仅提供传感器硬件,更能结合行业工艺,提供包括标定、算法在内的软硬件一体化力控方案,降低用户的使用门槛。
总结而言:
如果你的机器人在执行“医疗手术”或“芯片封装”,请为它配备安置在末端直接测量。
如果你的机器人需要在生产线上各类任务间灵活切换,那么一个内置的、可靠的一体式集成系统更为合适。
理解技术本质,匹配场景需求,正是选择传感器的关键。而海伯森正通过持续创新,为机器人的“触觉进化”提供着坚实的“全维”支撑。
关注我们,获取更多高端传感器及各方面应用解析。
-
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?2026-04-29 223
-
为什么说关节扭矩传感器是高端机器人的“触觉神经”?2026-04-17 858
-
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘2026-04-13 708
-
为何人形机器人离不开六维力传感器?2025-10-26 6483
-
人形机器人核心配件之六维力传感器2025-04-15 2163
-
六维力传感器——人形机器人的力觉2024-06-29 2325
-
基于六维力传感器的机械臂自动装配应用2024-06-06 2334
-
ROBOTOUS电容式六维力传感器2023-04-13 1219
-
六维力传感器赋予机器人精密“触觉”感知2022-06-01 3189
-
机器人传感器应用2021-09-16 1856
-
六维力传感器赋予机器人真正的触觉体验2020-12-26 1209
-
盘点工业机器人常见的六种传感器类型2018-11-08 3446
-
六维力传感器赋予机器人真正的触觉2018-08-28 467
-
机器人六维传感器研究概况及发展预测2009-07-13 749
全部0条评论

快来发表一下你的评论吧 !
